

Using Real-time Feedback To Improve Surgical Performance on a Robotic Tissue Dissection Task
- PMID: 36506257
- PMCID: PMC9732447
- DOI: 10.1016/j.euros.2022.09.015
Using Real-time Feedback To Improve Surgical Performance on a Robotic Tissue Dissection Task
Abstract
Background: There is no standard for the feedback that an attending surgeon provides to a training surgeon, which may lead to variable outcomes in teaching cases.
Objective: To create and administer standardized feedback to medical students in an attempt to improve performance and learning.
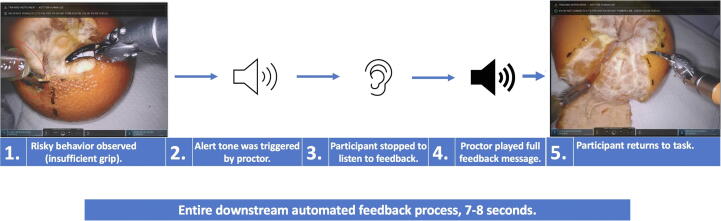
Design setting and participants: A cohort of 45 medical students was recruited from a single medical school. Participants were randomly assigned to two groups. Both completed two rounds of a robotic surgical dissection task on a da Vinci Xi surgical system. The first round was the baseline assessment. In the second round, one group received feedback and the other served as the control (no feedback).
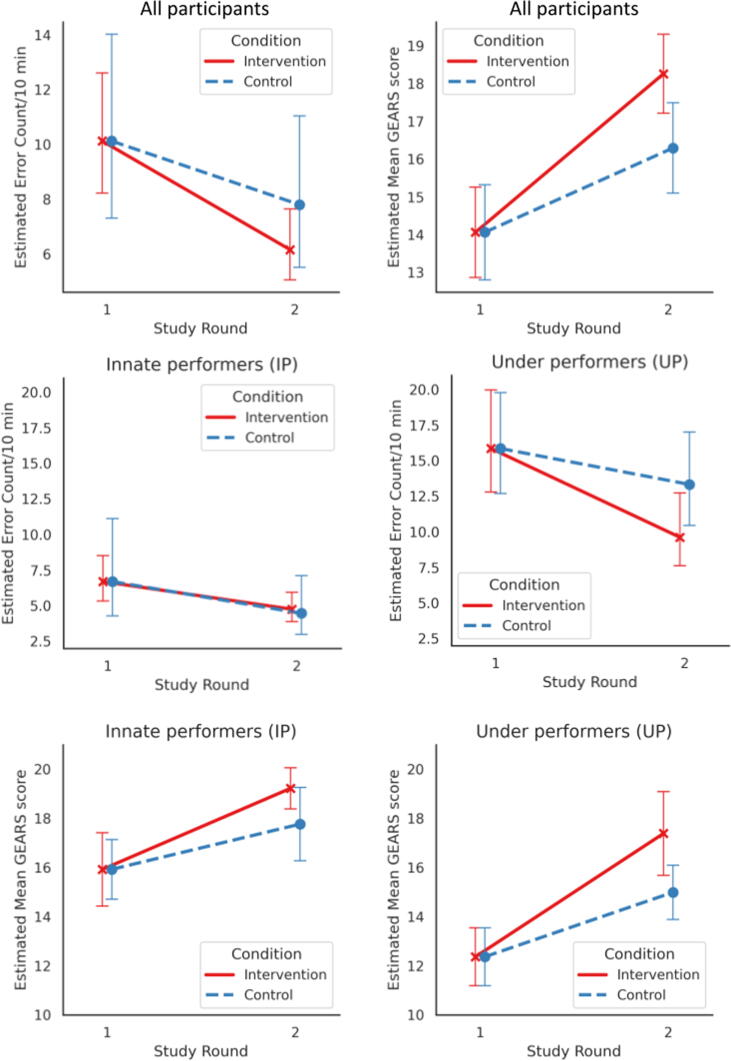
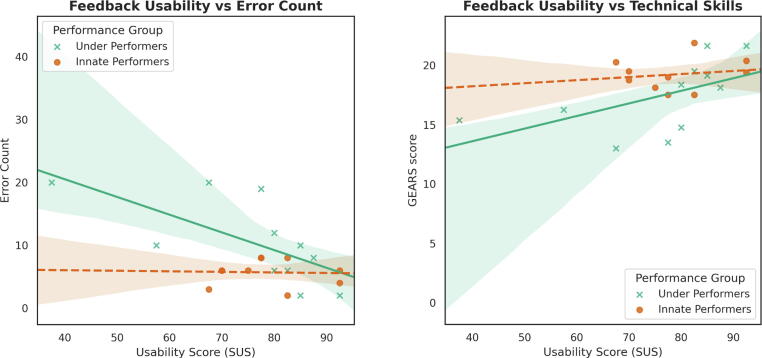
Outcome measurements and statistical analysis: Video from each round was retrospectively reviewed by four blinded raters and given a total error tally (primary outcome) and a technical skills score (Global Evaluative Assessment of Robotic Surgery [GEARS]). Generalized linear models were used for statistical modeling. According to their initial performance, each participant was categorized as either an innate performer or an underperformer, depending on whether their error tally was above or below the median.
Results and limitations: In round 2, the intervention group had a larger decrease in error rate than the control group, with a risk ratio (RR) of 1.51 (95% confidence interval [CI] 1.07-2.14; p = 0.02). The intervention group also had a greater increase in GEARS score in comparison to the control group, with a mean group difference of 2.15 (95% CI 0.81-3.49; p < 0.01). The interaction effect between innate performers versus underperformers and the intervention was statistically significant for the error rates, at F(1,38) = 5.16 (p = 0.03). Specifically, the intervention had a statistically significant effect on the error rate for underperformers (RR 2.23, 95% CI 1.37-3.62; p < 0.01) but not for innate performers (RR 1.03, 95% CI 0.63-1.68; p = 0.91).
Conclusions: Real-time feedback improved performance globally compared to the control. The benefit of real-time feedback was stronger for underperformers than for trainees with innate skill.
Patient summary: We found that real-time feedback during a training task using a surgical robot improved the performance of trainees when the task was repeated. This feedback approach could help in training doctors in robotic surgery.
Keywords: Feedback; Learning; Mentoring; Robotic surgery; Surgical education.
© 2022 The Author(s).
Figures
Similar articles
-
Transferability of Virtual Reality, Simulation-Based, Robotic Suturing Skills to a Live Porcine Model in Novice Surgeons: A Single-Blind Randomized Controlled Trial.J Minim Invasive Gynecol. 2017 Mar-Apr;24(3):420-425. doi: 10.1016/j.jmig.2016.12.016. Epub 2016 Dec 24. J Minim Invasive Gynecol. 2017. PMID: 28027975 Clinical Trial.
-
A Comparison of Robotic Simulation Performance on Basic Virtual Reality Skills: Simulator Subjective Versus Objective Assessment Tools.J Minim Invasive Gynecol. 2017 Nov-Dec;24(7):1184-1189. doi: 10.1016/j.jmig.2017.07.019. Epub 2017 Jul 27. J Minim Invasive Gynecol. 2017. PMID: 28757439 Clinical Trial.
-
Implementation and Validation of an Automated, Longitudinal Robotic Surgical Evaluation and Feedback Program at a High-volume Center and Impact on Training.Eur Urol Open Sci. 2024 Mar 5;62:81-90. doi: 10.1016/j.euros.2024.02.014. eCollection 2024 Apr. Eur Urol Open Sci. 2024. PMID: 38468865 Free PMC article.
-
A Randomized Comparison of 2 Robotic Virtual Reality Simulators and Evaluation of Trainees' Skills Transfer to a Simulated Robotic Urethrovesical Anastomosis Task.Urology. 2018 Jan;111:110-115. doi: 10.1016/j.urology.2017.09.023. Epub 2017 Oct 18. Urology. 2018. PMID: 29054720 Clinical Trial.
-
Transoral Robotic Surgical Proficiency Via Real-Time Tactile Collision Awareness System.Laryngoscope. 2020 Dec;130 Suppl 6:S1-S17. doi: 10.1002/lary.29034. Epub 2020 Aug 31. Laryngoscope. 2020. PMID: 32865822
Cited by
-
Simulation training in urology.Curr Opin Urol. 2024 Jan 1;34(1):37-42. doi: 10.1097/MOU.0000000000001141. Epub 2023 Nov 1. Curr Opin Urol. 2024. PMID: 37909886 Free PMC article. Review.
-
Human AI collaboration for unsupervised categorization of live surgical feedback.NPJ Digit Med. 2024 Dec 20;7(1):372. doi: 10.1038/s41746-024-01383-3. NPJ Digit Med. 2024. PMID: 39706895 Free PMC article.
-
Artificial Intelligence-Based Video Feedback to Improve Novice Performance on Robotic Suturing Skills: A Pilot Study.J Endourol. 2024 Aug;38(8):884-891. doi: 10.1089/end.2023.0328. Epub 2024 Jan 29. J Endourol. 2024. PMID: 37905524 Free PMC article. Clinical Trial.
-
Clinical applications of artificial intelligence in robotic surgery.J Robot Surg. 2024 Mar 1;18(1):102. doi: 10.1007/s11701-024-01867-0. J Robot Surg. 2024. PMID: 38427094 Free PMC article. Review.
-
Robotic surgical curriculum for medical students: a scoping review.J Robot Surg. 2025 Aug 19;19(1):496. doi: 10.1007/s11701-025-02667-w. J Robot Surg. 2025. PMID: 40830300
References
-
- Kopp K.J., Britt M.A., Millis K., Graesser A.C. Improving the efficiency of dialogue in tutoring. Learn Instruct. 2012;22:320–330. doi: 10.1016/j.learninstruc.2011.12.002. - DOI
-
- Ma R., Nguyen J.H., Cowan A., et al. Using customized feedback to expedite the acquisition of robotic suturing skills. J Urol. 2022;208:414–424. - PubMed
LinkOut - more resources
Full Text Sources
