

DESIGN, ANALYSIS, AND PROTOTYPING OF A NOVEL SINGLE DEGREE-OF-FREEDOM INDEX FINGER EXOSKELETON MECHANISM
- PMID: 36507922
- PMCID: PMC9731514
- DOI: 10.1115/detc2022-89625
DESIGN, ANALYSIS, AND PROTOTYPING OF A NOVEL SINGLE DEGREE-OF-FREEDOM INDEX FINGER EXOSKELETON MECHANISM
Abstract
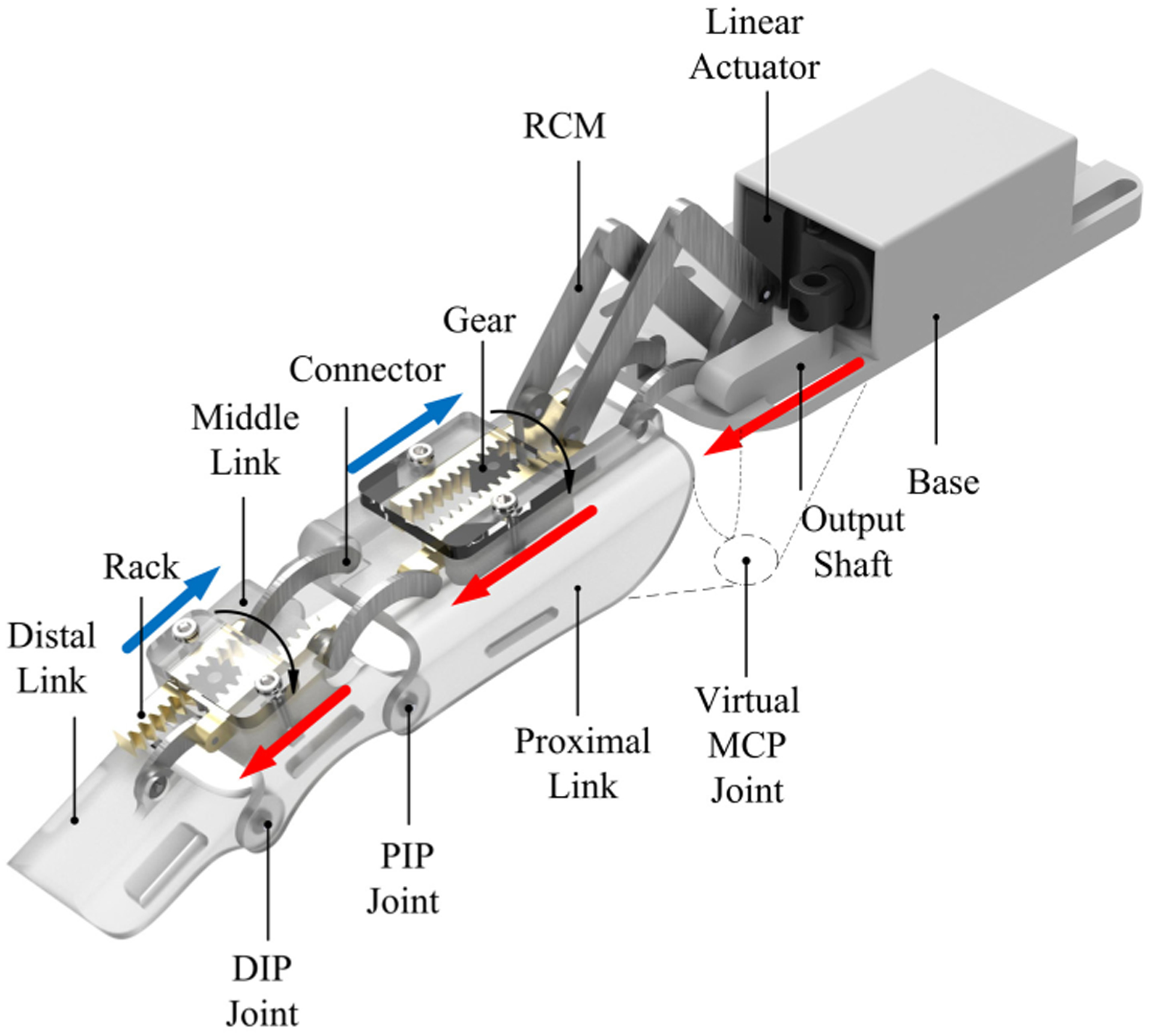
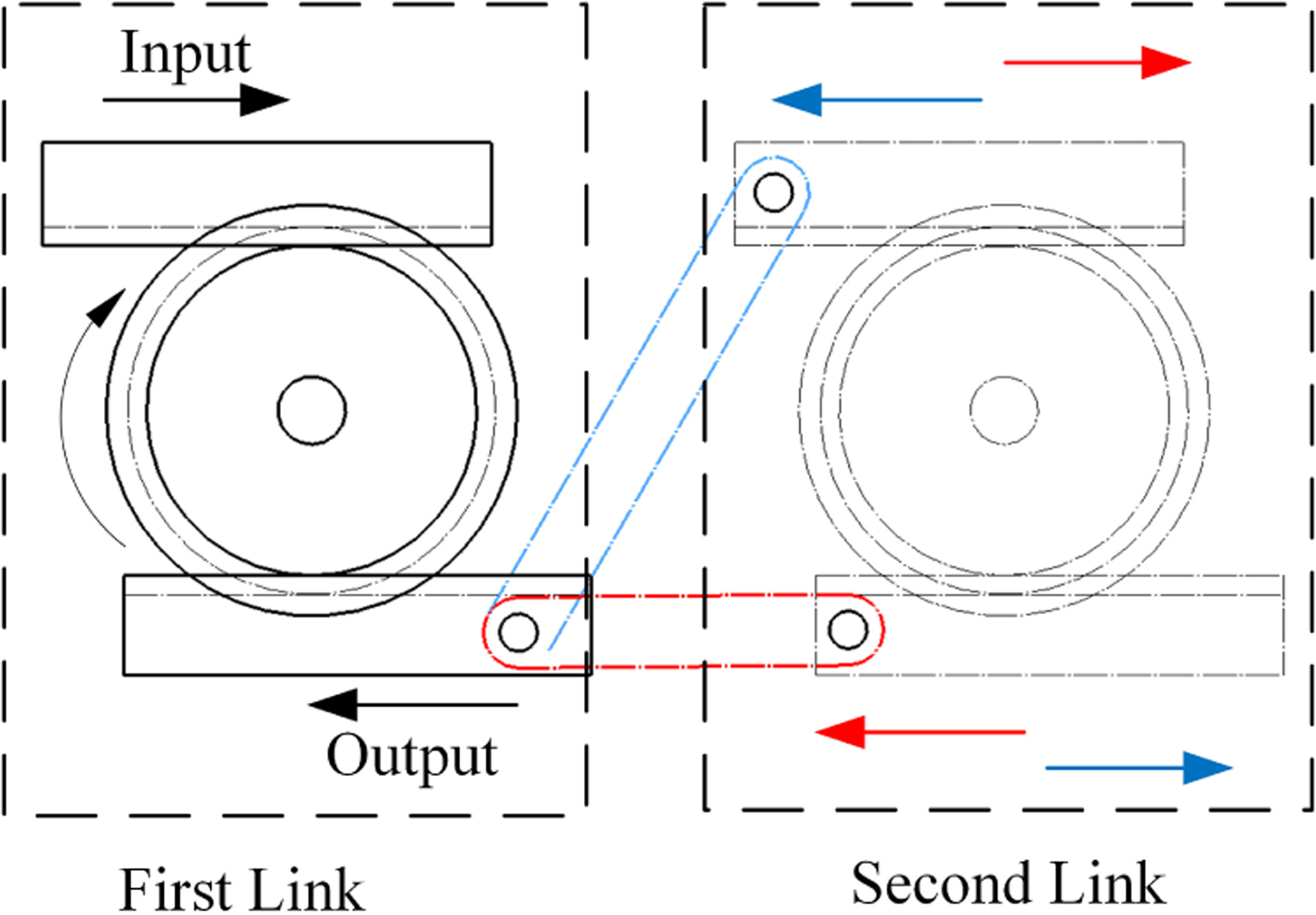
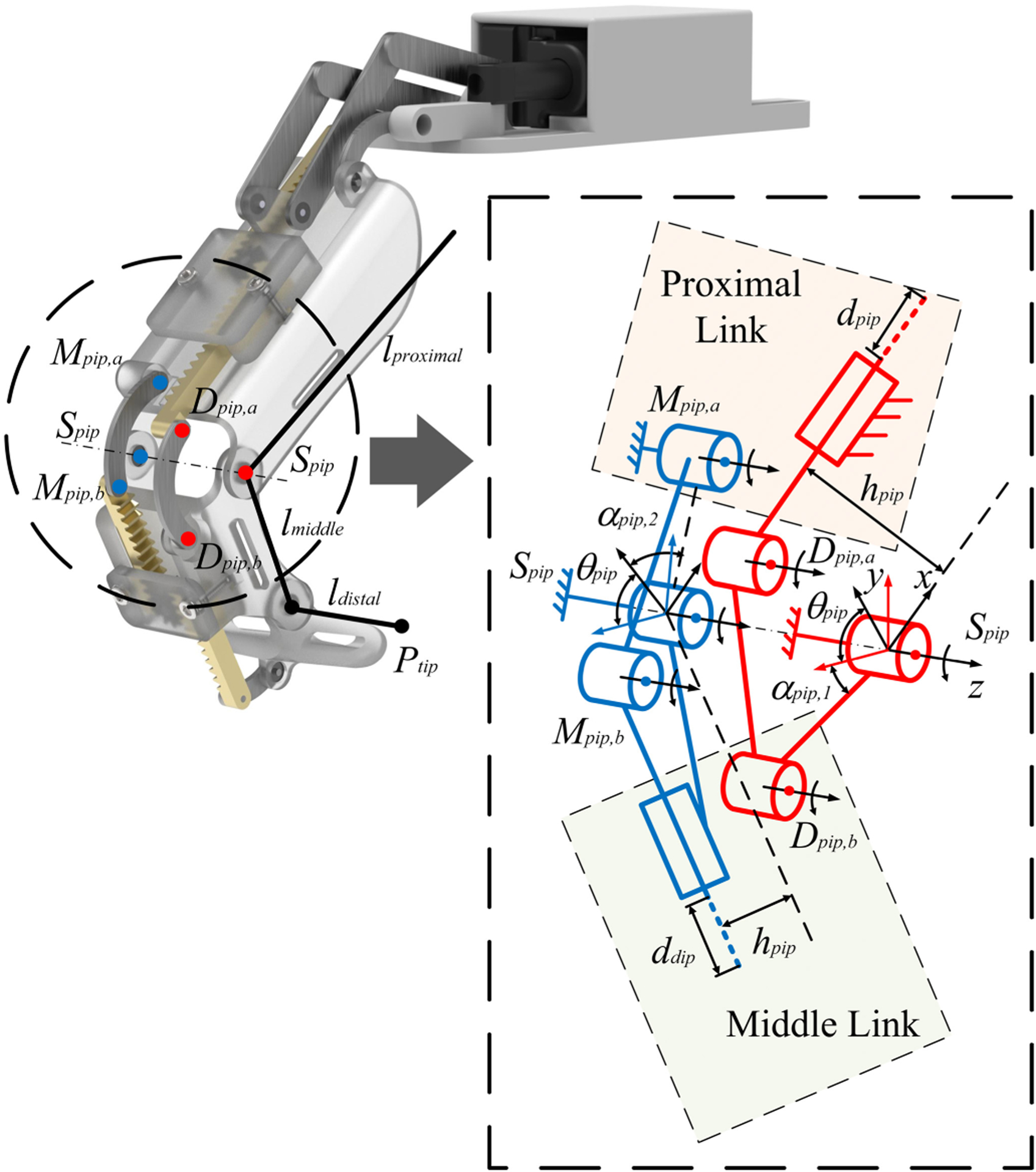
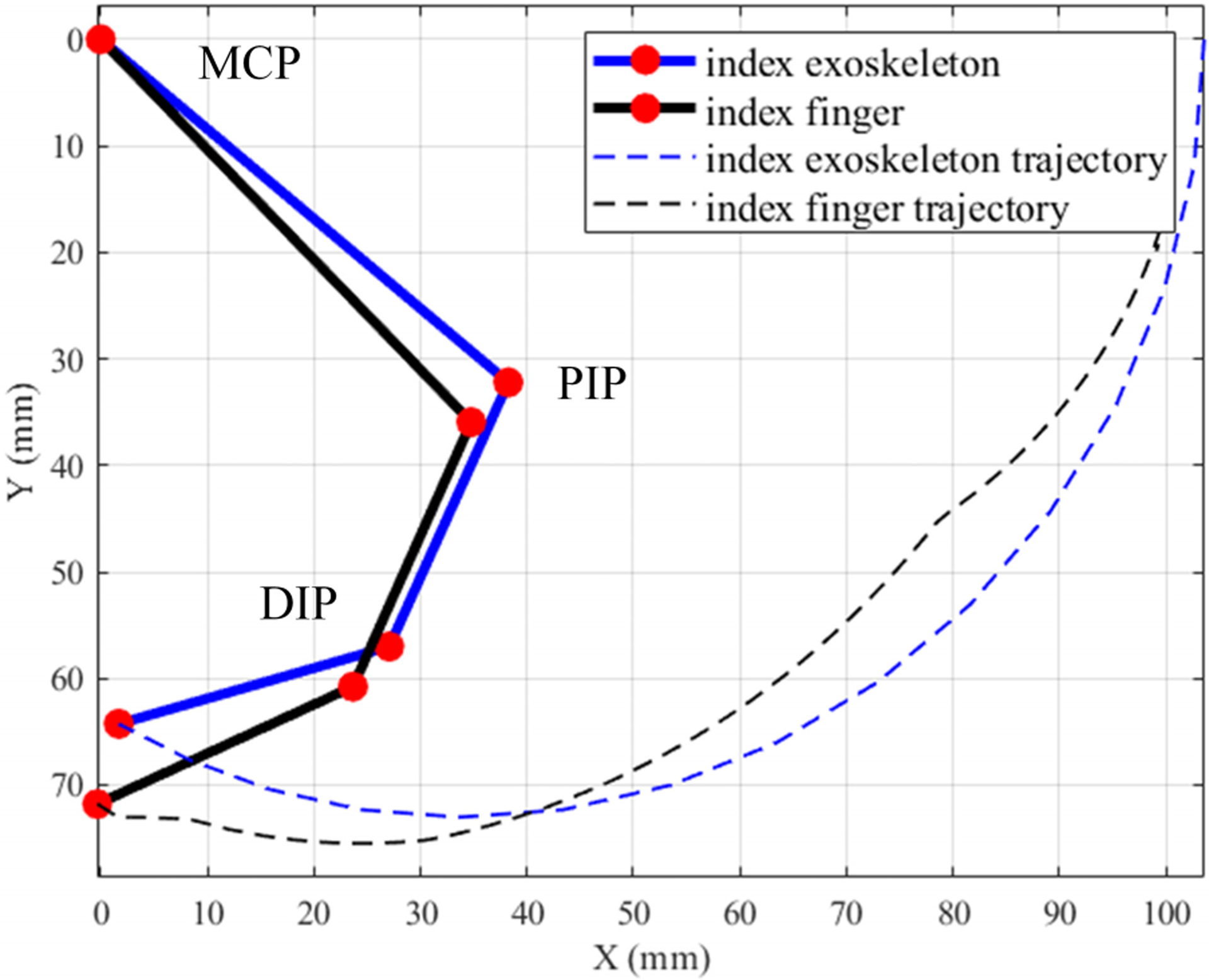
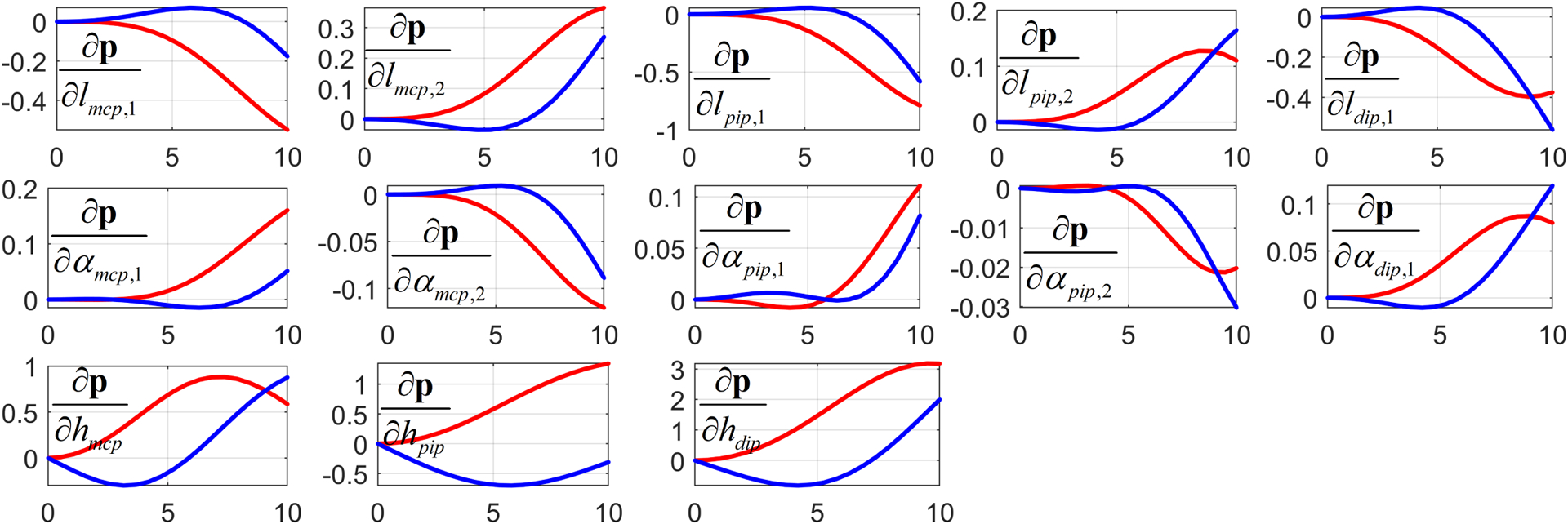
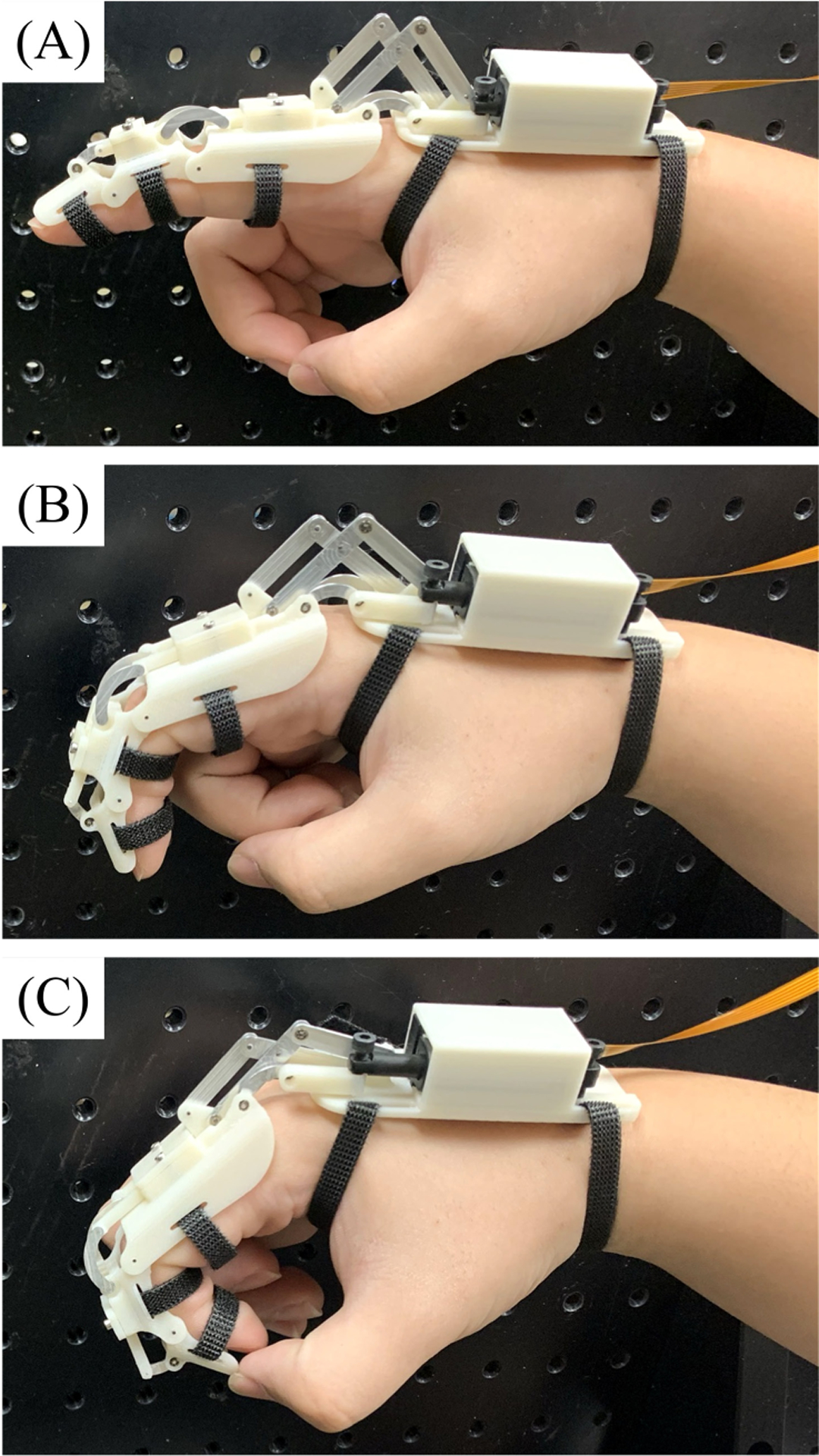
This paper presents a novel index finger exoskeleton mechanism for patients who suffer from brachial plexus injuries, which takes advantage of our previously proposed rigid coupling hybrid mechanism (RCHM) concept used for robotic tail mechanisms. The core idea of this concept is to drive the (i+1)-th link using the motions of the i-th link, instead of the traditional way of transmitting motion directly from the base. This specific configuration allows designing a single degree of freedom (DOF) bending mechanism using a low-profile rack and pinion mechanism and makes the proposed exoskeleton system compact, lightweight, and portable, which are highly desired features for daily usages of exoskeleton gloves. The mechanism is optimized to mimic the grasping motions of human fingers and the sensitivity analysis of its critical design variables is then conducted to explore the performance of the optimization results. The results show that for the current design, the tip position accuracy is mainly affected by the distance between the rack and the corresponding joints. A proof-of-concept prototype was built to verify the novel mobility of the proposed mechanism and to evaluate its performance on a human finger. The index finger exoskeleton experiments demonstrate the new mechanism's ability to grasp small objects.
Figures
Similar articles
-
Development of a Novel Low-profile Robotic Exoskeleton Glove for Patients with Brachial Plexus Injuries.Rep U S. 2022 Oct;2022:11121-11126. doi: 10.1109/iros47612.2022.9981124. Epub 2022 Dec 26. Rep U S. 2022. PMID: 37293247 Free PMC article.
-
Development and Experimental Evaluation of a Novel Portable Haptic Robotic Exoskeleton Glove System for Patients with Brachial Plexus Injuries.Rep U S. 2022 Oct;2022:11115-11120. doi: 10.1109/iros47612.2022.9981468. Epub 2022 Dec 26. Rep U S. 2022. PMID: 37303849 Free PMC article.
-
Stable Grasp Control With a Robotic Exoskeleton Glove.J Mech Robot. 2020 Dec 1;12(6):061015. doi: 10.1115/1.4047724. Epub 2020 Jul 28. J Mech Robot. 2020. PMID: 34168720 Free PMC article.
-
Design, Control, and Experimental Evaluation of A Novel Robotic Glove System for Patients with Brachial Plexus Injuries.IEEE Trans Robot. 2023 Apr;39(2):1637-1652. doi: 10.1109/tro.2022.3220973. Epub 2022 Nov 23. IEEE Trans Robot. 2023. PMID: 37035529 Free PMC article.
-
Development of a multi-DoF transhumeral robotic arm prosthesis.Med Eng Phys. 2017 Oct;48:131-141. doi: 10.1016/j.medengphy.2017.06.034. Epub 2017 Jul 18. Med Eng Phys. 2017. PMID: 28728864 Review.
References
-
- Fujikawa K, 1963. “The Center of Gravity in the Parts of Human Body”. Okajimas Folia Anatomica Japonica, 39(3), pp. 117–125. - PubMed
-
- Park HR, Lee GS, Kim IS, and Chang J-C, 2017. “Brachial Plexus Injury in Adults”. The Nerve, 3(1), pp. 1–11.
-
- Giuffre JL, Kakar S, Bishop AT, Spinner RJ, and Shin AY, 2010. “Current Concepts of the Treatment of Adult Brachial Plexus Injuries”. Journal of Hand Surgery, 35(4), 4, pp. 678–688. - PubMed
-
- Carmeli E, Peleg S, Bartur G, Elbo E, and Vatine JJ, 2011. “HandTutorTM enhanced hand rehabilitation after stroke - a pilot study”. Physiotherapy Research International, 16(4), pp. 191–200. - PubMed
-
- Wolf SL, Winstein CJ, Miller JP, and Morris D, 2006. “Effect of Constraint-Induced Movement”. pp. 2095–2104. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources