

The InSight HP3 Penetrator (Mole) on Mars: Soil Properties Derived from the Penetration Attempts and Related Activities
- PMID: 36514324
- PMCID: PMC9734249
- DOI: 10.1007/s11214-022-00941-z
The InSight HP3 Penetrator (Mole) on Mars: Soil Properties Derived from the Penetration Attempts and Related Activities
Abstract
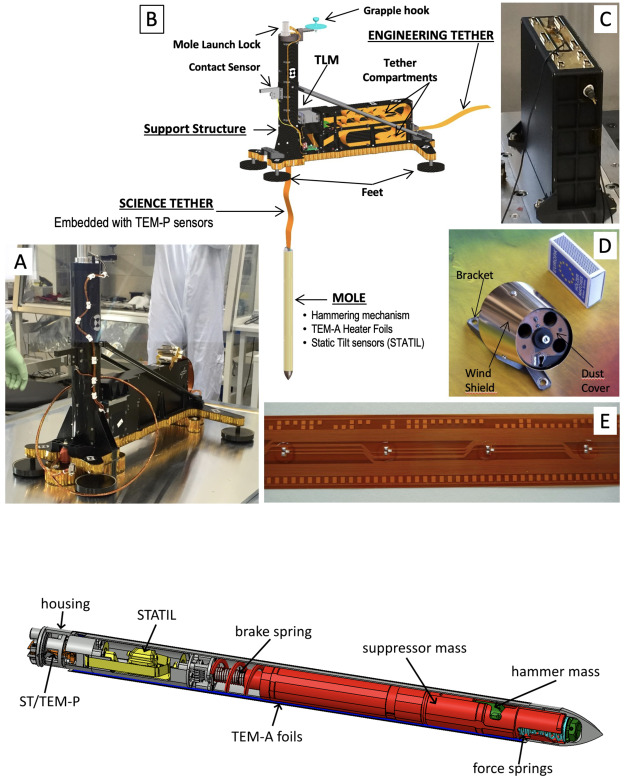
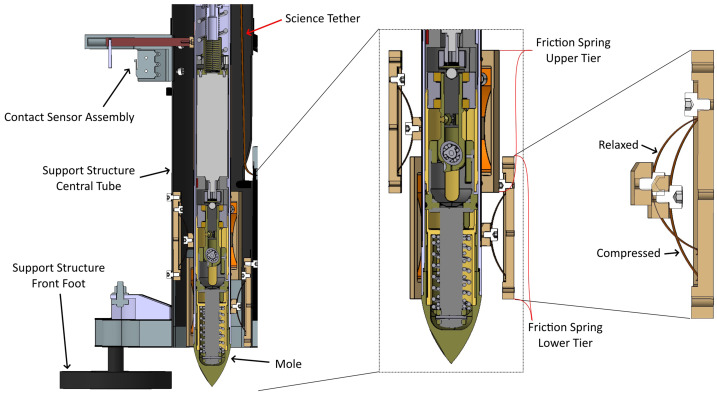
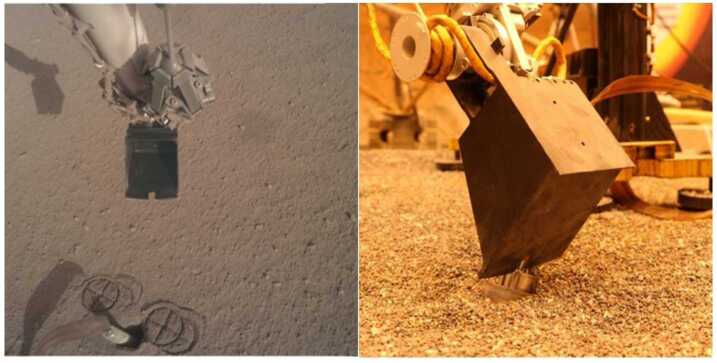
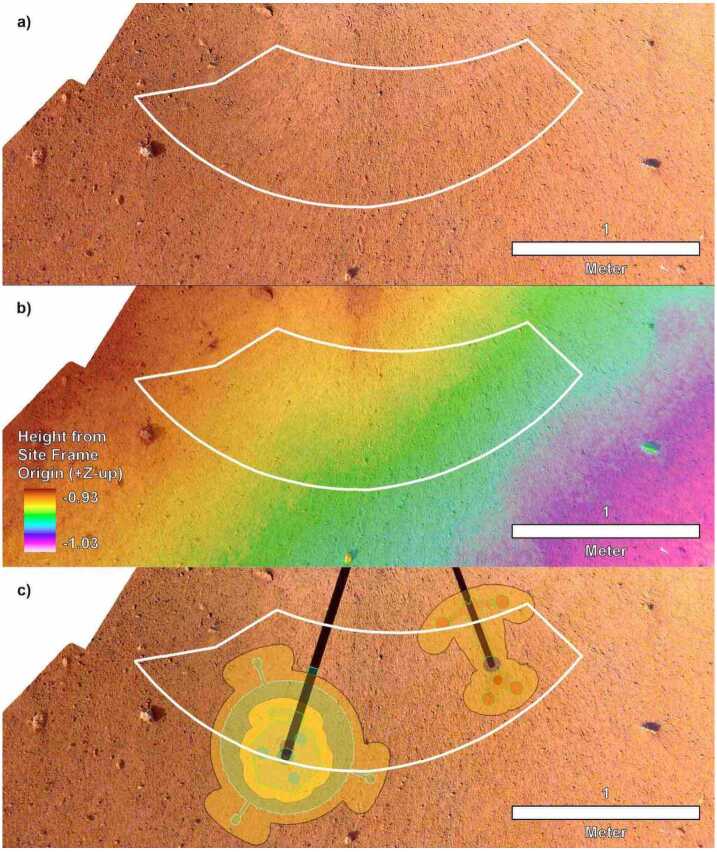
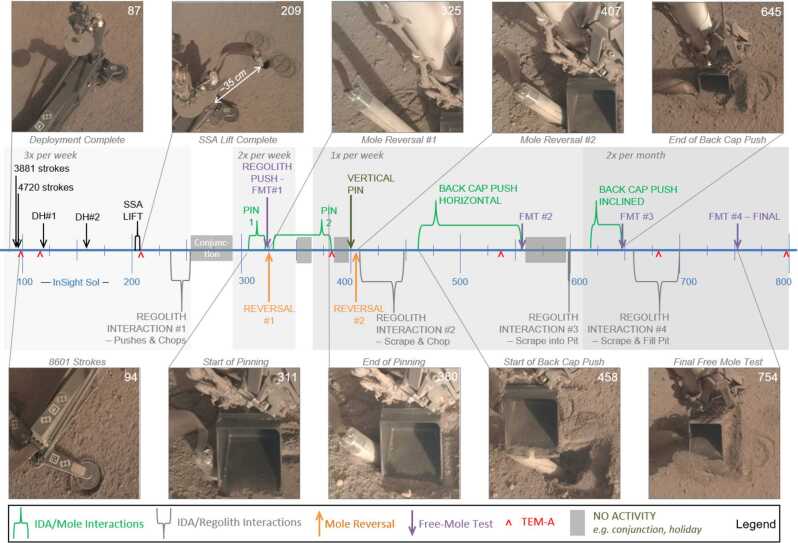
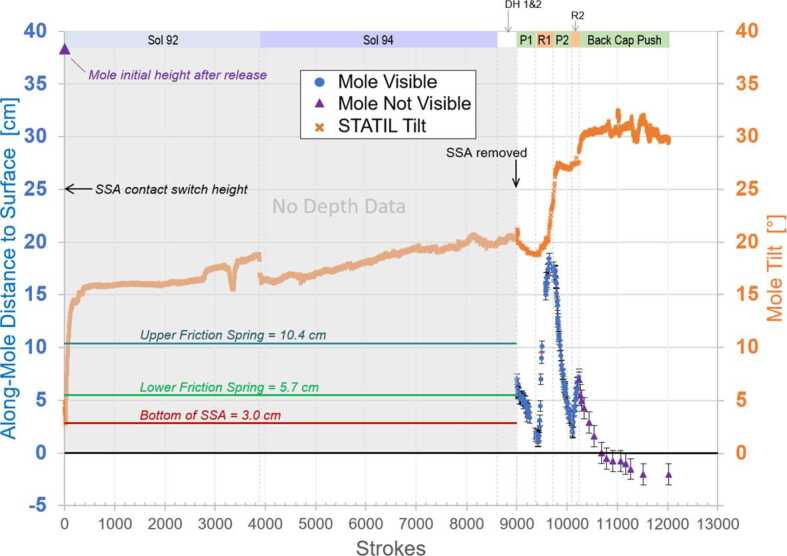
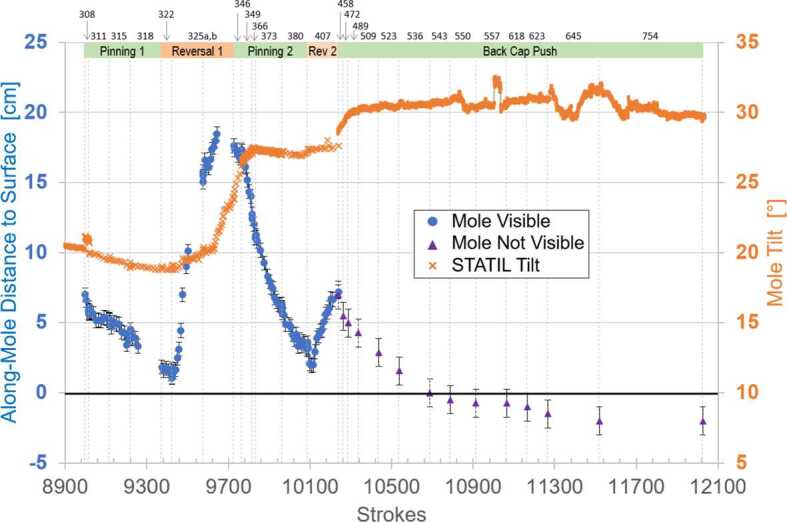
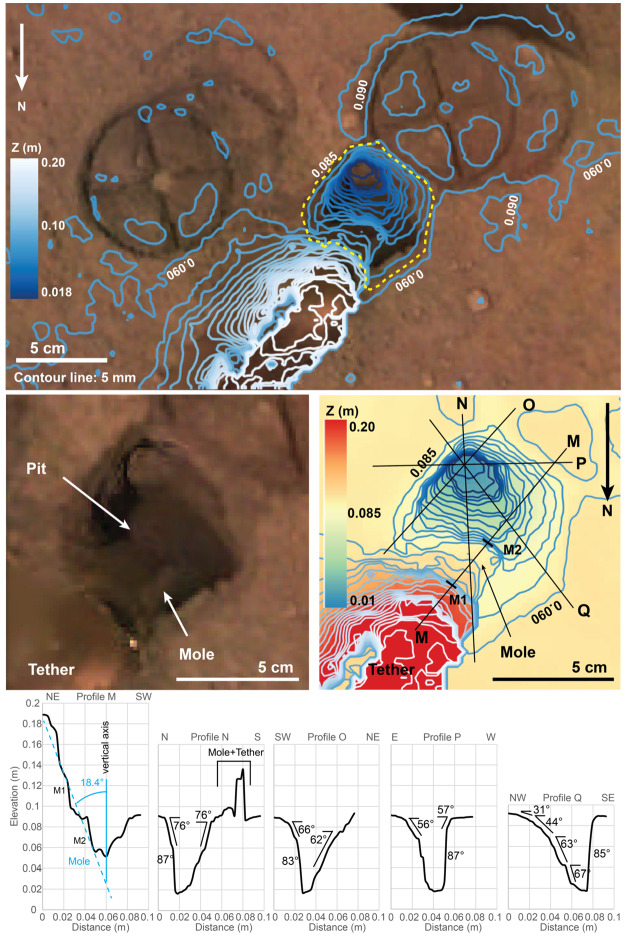
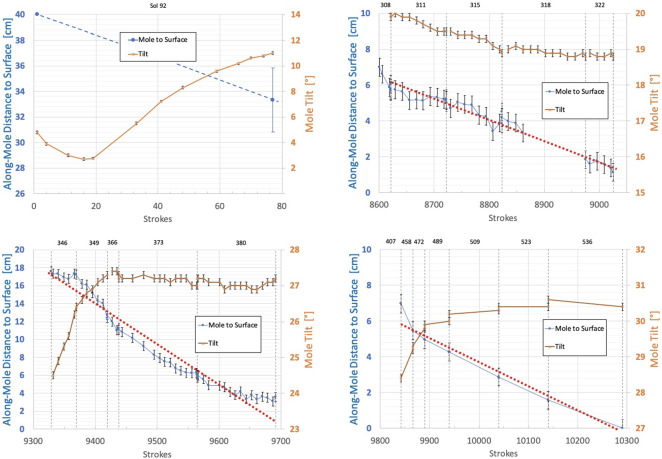
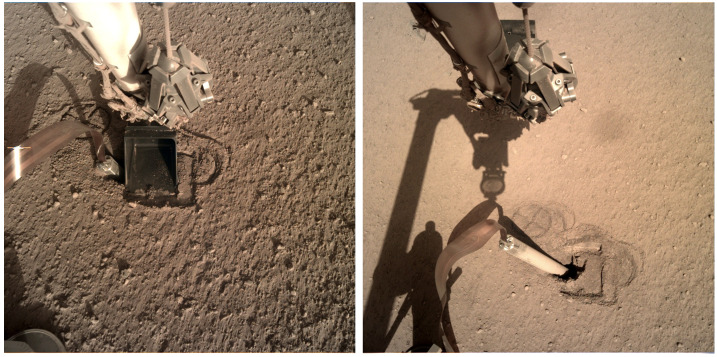
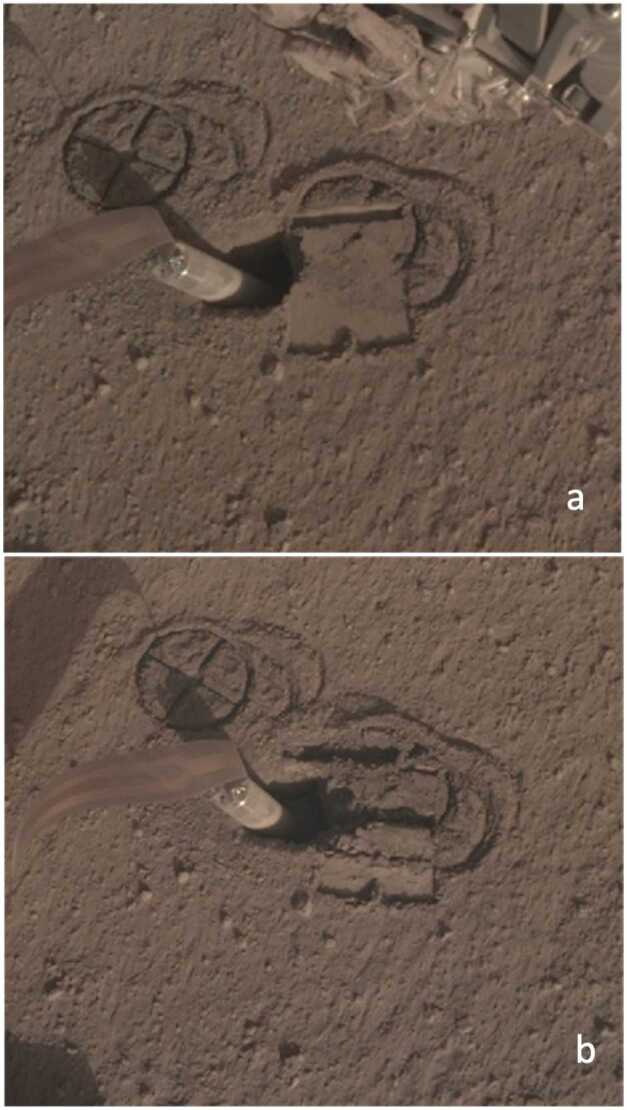
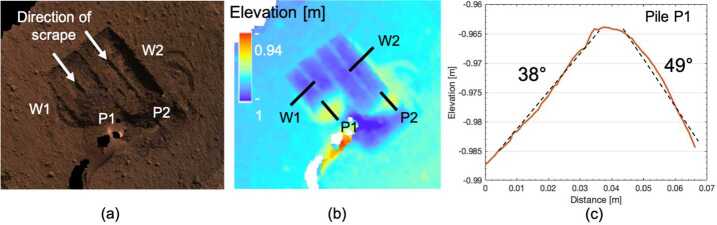
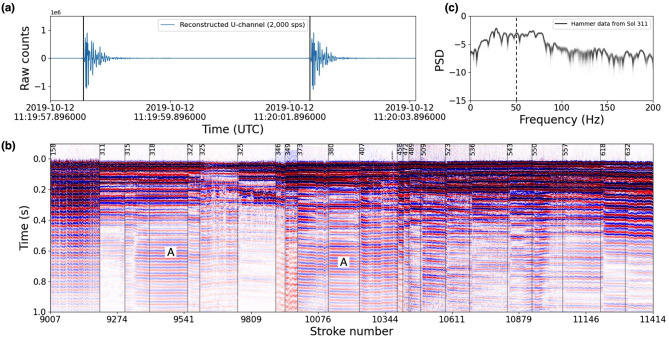
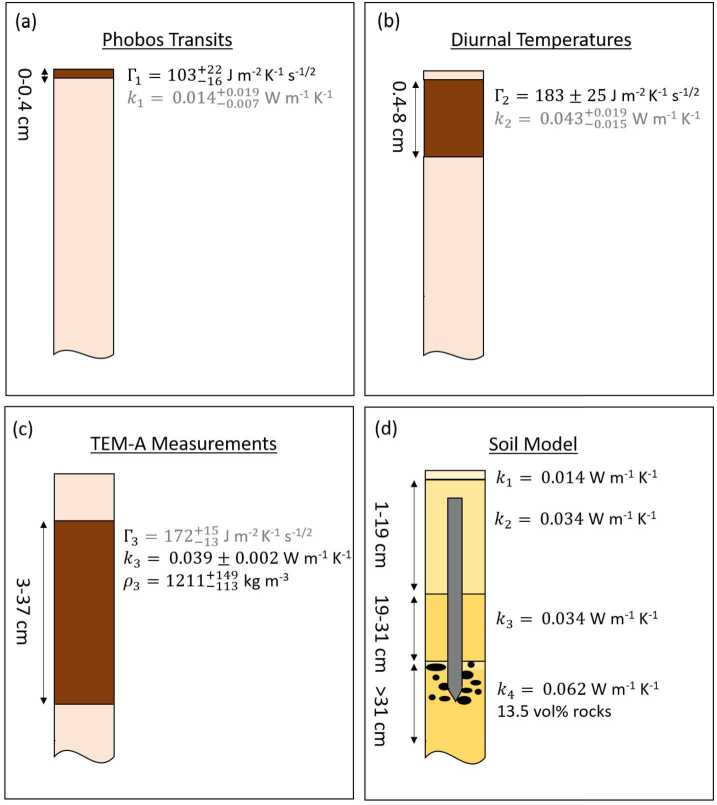
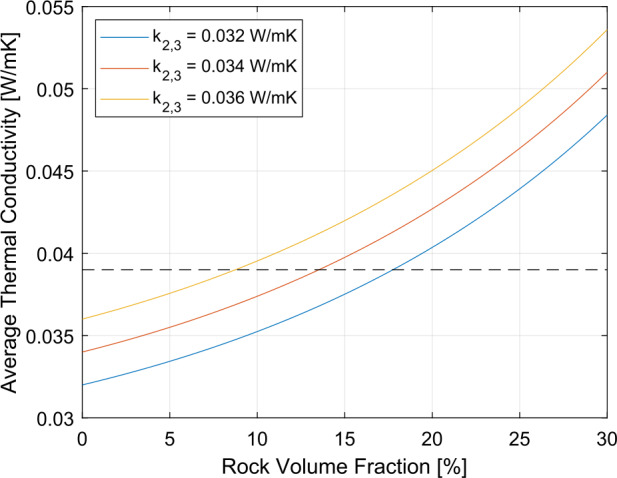
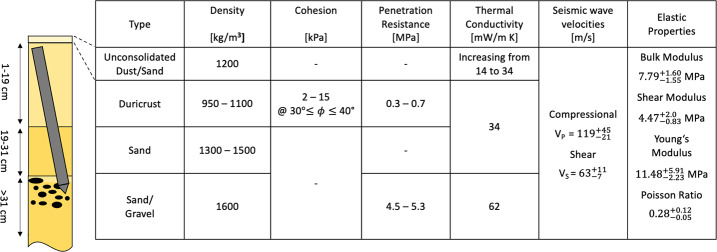
The NASA InSight Lander on Mars includes the Heat Flow and Physical Properties Package HP3 to measure the surface heat flow of the planet. The package uses temperature sensors that would have been brought to the target depth of 3-5 m by a small penetrator, nicknamed the mole. The mole requiring friction on its hull to balance remaining recoil from its hammer mechanism did not penetrate to the targeted depth. Instead, by precessing about a point midway along its hull, it carved a 7 cm deep and 5-6 cm wide pit and reached a depth of initially 31 cm. The root cause of the failure - as was determined through an extensive, almost two years long campaign - was a lack of friction in an unexpectedly thick cohesive duricrust. During the campaign - described in detail in this paper - the mole penetrated further aided by friction applied using the scoop at the end of the robotic Instrument Deployment Arm and by direct support by the latter. The mole tip finally reached a depth of about 37 cm, bringing the mole back-end 1-2 cm below the surface. It reversed its downward motion twice during attempts to provide friction through pressure on the regolith instead of directly with the scoop to the mole hull. The penetration record of the mole was used to infer mechanical soil parameters such as the penetration resistance of the duricrust of 0.3-0.7 MPa and a penetration resistance of a deeper layer ( depth) of . Using the mole's thermal sensors, thermal conductivity and diffusivity were measured. Applying cone penetration theory, the resistance of the duricrust was used to estimate a cohesion of the latter of 2-15 kPa depending on the internal friction angle of the duricrust. Pushing the scoop with its blade into the surface and chopping off a piece of duricrust provided another estimate of the cohesion of 5.8 kPa. The hammerings of the mole were recorded by the seismometer SEIS and the signals were used to derive P-wave and S-wave velocities representative of the topmost tens of cm of the regolith. Together with the density provided by a thermal conductivity and diffusivity measurement using the mole's thermal sensors, the elastic moduli were calculated from the seismic velocities. Using empirical correlations from terrestrial soil studies between the shear modulus and cohesion, the previous cohesion estimates were found to be consistent with the elastic moduli. The combined data were used to derive a model of the regolith that has an about 20 cm thick duricrust underneath a 1 cm thick unconsolidated layer of sand mixed with dust and above another 10 cm of unconsolidated sand. Underneath the latter, a layer more resistant to penetration and possibly containing debris from a small impact crater is inferred. The thermal conductivity increases from 14 mW/m K to 34 mW/m K through the 1 cm sand/dust layer, keeps the latter value in the duricrust and the sand layer underneath and then increases to 64 mW/m K in the sand/gravel layer below.
Supplementary information: The online version contains supplementary material available at 10.1007/s11214-022-00941-z.
Keywords: Homestead Hollow near surface structure; Martian soil mechanical and thermal properties; Record of operating a penetrator on Mars.
© The Author(s) 2022.
Conflict of interest statement
Competing InterestsThe authors declare that they have no conflict of interest.
Figures


References
-
- Abarca H, Deen R, Hollins G, Zamani P, Maki J, Tinio A, Pariser O, Ayoub F, Toole N, Algermissen S, Soliman T, Lu Y, Golombek M, Calef F, Grimes K, De Cesare C, Sorice C. Image and data processing for InSight lander operations and Science. Space Sci Rev. 2019;215(B9):14,095–14,104. doi: 10.1007/s11214-019-0587-9. - DOI
-
- ASTM C1444-00 (2000) Standard test method for measuring the angle of repose of free-flowing mold powders. Standard, ASTM International, West Conshohocken, PA, USA
-
- Banaszkiewicz M, Seiferlin K, Spohn T, Kargl G, Koemle N. A new method for the determination of thermal conductivity and thermal diffusivity from line heat source measurements. Rev Sci Instrum. 1997;68:4184–4187. doi: 10.1063/1.1148365. - DOI
-
- Banerdt WB, Smrekar SE, Banfield D, Giardini D, Golombek M, Johnson CL, Lognonné P, Spiga A, Spohn T, Perrin C, Stähler SC, Antonangeli D, Asmar S, Beghein C, Bowles N, Bozdag E, Chi P, Christensen U, Clinton J, Collins GS, Daubar I, Dehant V, Drilleau M, Fillingim M, Folkner W, Garcia RF, Garvin J, Grant J, Grott M, Grygorczuk J, Hudson T, Irving JCE, Kargl G, Kawamura T, Kedar S, King S, Knapmeyer-Endrun B, Knapmeyer M, Lemmon M, Lorenz R, Maki JN, Margerin L, McLennan SM, Michaut C, Mimoun D, Mittelholz A, Mocquet A, Morgan P, Mueller NT, Murdoch N, Nagihara S, Newman C, Nimmo F, Panning M, Pike WT, Plesa AC, Rodriguez S, Rodriguez-Manfredi JA, Russell CT, Schmerr N, Siegler M, Stanley S, Stutzmann E, Teanby N, Tromp J, van Driel M, Warner N, Weber R, Wieczorek M. Initial results from the InSight mission on Mars. Nat Geosci. 2020;13:183–189. doi: 10.1038/s41561-020-0544-y. - DOI
-
- Banin A, Clark BC, Waenke H. Surface chemistry and mineralogy. In: George M, editor. Mars. Tucson: University of Arizona Press; 1992. pp. 594–625.
Publication types
LinkOut - more resources
Full Text Sources
Research Materials
Miscellaneous