

Enhanced Accuracy in Magnetic Actuation: Closed-loop Control of a Magnetic Agent with Low-Error Numerical Magnetic Model Estimation
- PMID: 36544557
- PMCID: PMC9762677
- DOI: 10.1109/lra.2022.3191047
Enhanced Accuracy in Magnetic Actuation: Closed-loop Control of a Magnetic Agent with Low-Error Numerical Magnetic Model Estimation
Abstract
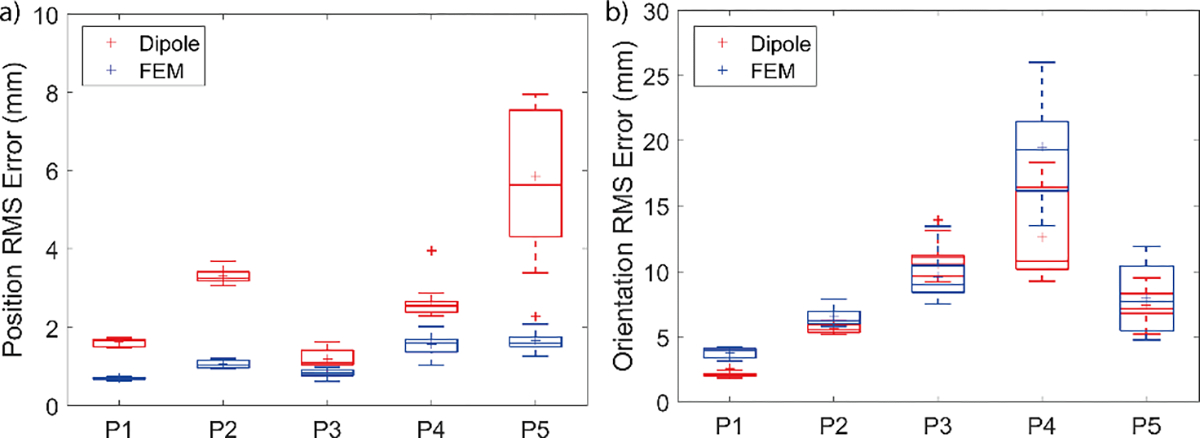
Magnetic actuation holds promise for wirelessly controlling small, magnetic surgical tools and may enable the next generation of ultra minimally invasive surgical robotic systems. Precise torque and force exertion are required for safe surgical operations and accurate state control. Dipole field estimation models perform well far from electromagnets but yield large errors near coils. Thus, manipulations near coils suffer from severe (10×) field modeling errors. We experimentally quantify closed-loop magnetic agent control performance by using both a highly erroneous dipole model and a more accurate numerical magnetic model to estimate magnetic forces and torques for any given robot pose in 2D. We compare experimental measurements with estimation errors for the dipole model and our finite element analysis (FEA) based model of fields near coils. With five different paths designed for this study, we demonstrate that FEA-based magnetic field modeling reduces positioning root-mean-square (RMS) errors by 48% to 79% as compared with dipole models. Models demonstrate close agreement for magnetic field direction estimation, showing similar accuracy for orientation control. Such improved magnetic modelling is crucial for systems requiring robust estimates of magnetic forces for positioning agents, particularly in force-sensitive environments like surgical manipulation.
Keywords: Closed-loop Control; Magnetic Modeling; Magnetic Robots; Medical Robotics.
Figures







References
-
- Yang G-Z, Bellingham J, Dupont PE, Fischer P, Floridi L, Full R, Jacobstein N, Kumar V, McNutt M, Merrifield R, et al., “The grand challenges of science robotics,” Science Robotics, vol. 3, no. 14, p. eaar7650, 2018. - PubMed
-
- Diana M and Marescaux J, “Robotic surgery,” Journal of British Surgery, vol. 102, no. 2, pp. e15–e28, 2015. - PubMed
-
- Erin O, Liu X, Ge J, Opfermann J, Barnoy Y, Mair LO, Kang JU, Gensheimer W, Weinberg IN, Diaz-Mercado Y, and Krieger A, “Overcoming the force limitations of magnetic robotic surgery: Magnetic pulse actuated collisions for tissue-penetrating-needle for tetherless interventions,” Advanced Intelligent Systems, p. 2200072, 2022. - PMC - PubMed
-
- Liu Y-L, Chen D, Shang P, and Yin D-C, “A review of magnet systems for targeted drug delivery,” Journal of Controlled Release, vol. 302, pp. 90–104, 2019. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0168365919301919 - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources