

Opportunities and challenges in the development of exoskeletons for locomotor assistance
- PMID: 36550303
- PMCID: PMC11536595
- DOI: 10.1038/s41551-022-00984-1
Opportunities and challenges in the development of exoskeletons for locomotor assistance
Abstract
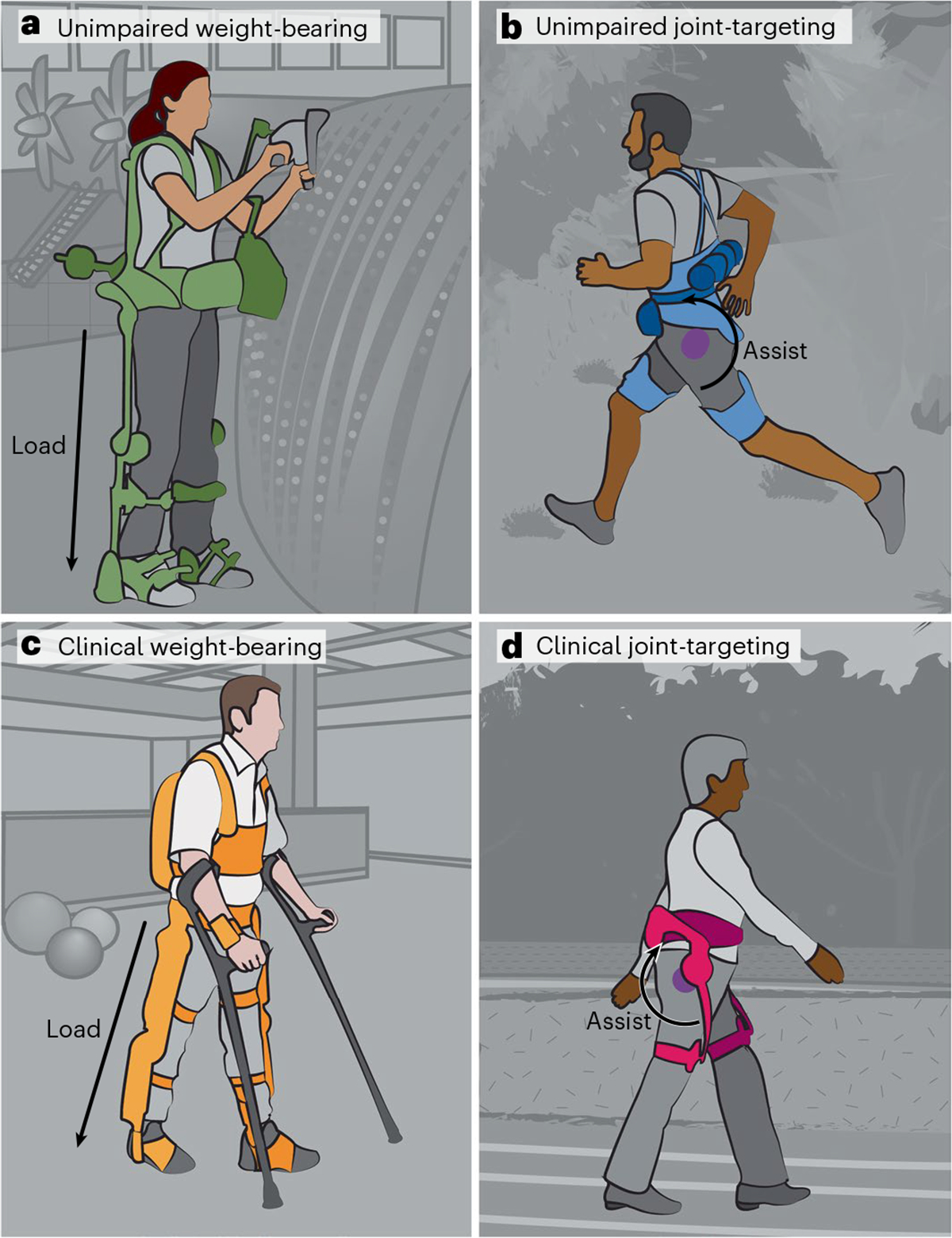
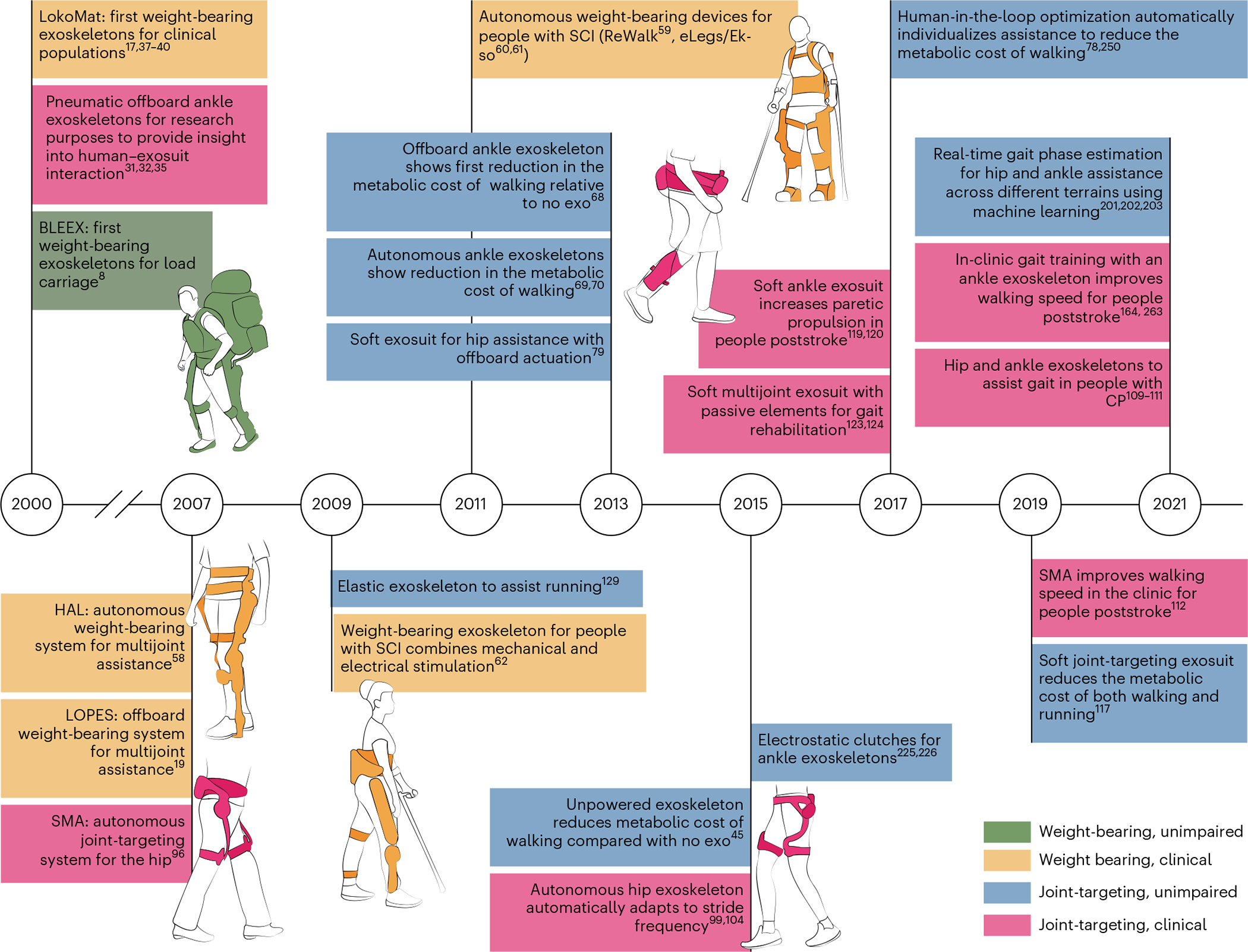
Exoskeletons can augment the performance of unimpaired users and restore movement in individuals with gait impairments. Knowledge of how users interact with wearable devices and of the physiology of locomotion have informed the design of rigid and soft exoskeletons that can specifically target a single joint or a single activity. In this Review, we highlight the main advances of the past two decades in exoskeleton technology and in the development of lower-extremity exoskeletons for locomotor assistance, discuss research needs for such wearable robots and the clinical requirements for exoskeleton-assisted gait rehabilitation, and outline the main clinical challenges and opportunities for exoskeleton technology.
© 2022. Springer Nature Limited.
Conflict of interest statement
Competing interests
Harvard University has entered into a licensing-and-collaboration agreement with ReWalk Robotics. C.J.W., C.S. and B.T.Q. are co-inventors on licensed patents and are paid consultants for ReWalk Robotics. L.N.A. is a paid consultant for MedRhythms. The other authors declare no competing interests.
Figures
References
-
- Yagn N Apparatus for facilitating walking, running, and jumping. US patent 420,179 (1890).
-
- Scholder CA Movement-cure apparatus. US patent 675,678 (1901).
-
- Büdingen T Movement-cure apparatus. US patent 964,898 (1910).
-
- Cobb GL Walking motion. US patent 2,010,482 (1935).
-
- Pietro F Device for the automatic control of the articulation of the knee applicable to a prosthesis of the thigh. US patent 2,305,291 (1937).
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Miscellaneous
