

Adaptive nonsingular terminal sliding mode control of robot manipulator based on contour error compensation
- PMID: 36609532
- PMCID: PMC9823000
- DOI: 10.1038/s41598-023-27633-0
Adaptive nonsingular terminal sliding mode control of robot manipulator based on contour error compensation
Abstract
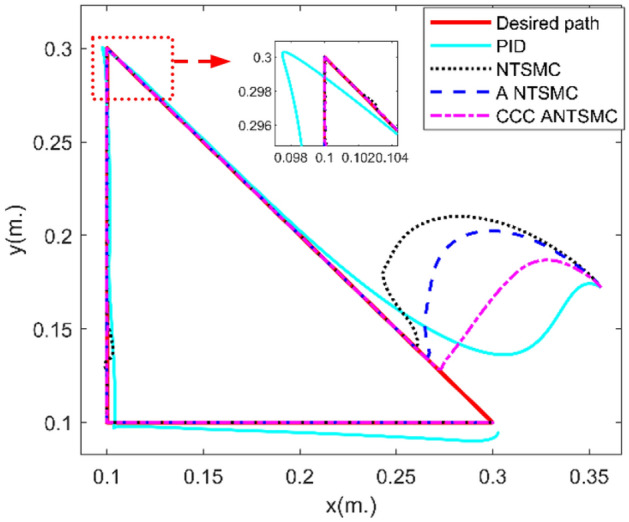
To achieve accurate contour tracking of robotic manipulators with system uncertainties, external disturbance and actuator faults, a cross-coupling contour adaptive nonsingular terminal sliding mode control (CCCANTSMC) is proposed. A nonsingular terminal sliding mode manifold is developed which eliminates the singularity completely. In order to avoid the demand of the prior knowledge of system uncertainties, external disturbance and actuator faults in practical applications, an adaptive tuning approach is proposed. The stability of the proposed control strategy is demonstrated by the finite-time stability theory. Then, the developed controller combines adaptive nonlinear terminal sliding mode control (ANTSMC) of joint trajectory tracking and proportion-differentiation control of end-effector contour tracking by introducing the coupling factor between multiple axes based on Jacobian. Moreover, a unified framework of cross-coupling contour compensation and reference position pre-compensation is built. Finally, numerical simulation and experimental results validate the effectiveness of the proposed control strategy.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures







References
-
- Xu P, Cheung CF, Wang CJ, Zhao CY. Novel hybrid robot and its processes for precision polishing of freeform surfaces. Precis. Eng.-J. Int. Soc. Precis. Eng. Nanotechnol. 2020;64:53–62.
-
- Bo L, Wang TY, Peng W. Cross-coupled control based on real-time Double Circle contour error estimation for biaxial motion system. Meas. Control. 2021;54(3–4):324–335. doi: 10.1177/0020294021993830. - DOI
-
- Oh YT. Study of orientation error on robot end effector and volumetric error of articulated robot. Appl. Sci.-Basel. 2019;9(23):5149. doi: 10.3390/app9235149. - DOI
-
- Hu CX, Lin SZ, Wang Z, Zhu Y. Task space contouring error estimation and precision iterative control of robotic manipulators. IEEE Robot. Autom. Lett. 2022;7(3):7926–7933. doi: 10.1109/LRA.2022.3180430. - DOI
-
- Hwang Y, Lee S, Hong J, Kim J. A novel end-effector robot system enabling to monitor upper-extremity posture during robot-aided planar reaching movements. IEEE Robot. Autom. Lett. 2020;5(2):3035–3041. doi: 10.1109/LRA.2020.2974453. - DOI
LinkOut - more resources
Full Text Sources
