

How Do Autonomous Vehicles Decide?
- PMID: 36616915
- PMCID: PMC9823427
- DOI: 10.3390/s23010317
How Do Autonomous Vehicles Decide?
Abstract
The advancement in sensor technologies, mobile network technologies, and artificial intelligence has pushed the boundaries of different verticals, e.g., eHealth and autonomous driving. Statistics show that more than one million people are killed in traffic accidents yearly, where the vast majority of the accidents are caused by human negligence. Higher-level autonomous driving has great potential to enhance road safety and traffic efficiency. One of the most crucial links to building an autonomous system is the task of decision-making. The ability of a vehicle to make robust decisions on its own by anticipating and evaluating future outcomes is what makes it intelligent. Planning and decision-making technology in autonomous driving becomes even more challenging, due to the diversity of the dynamic environments the vehicle operates in, the uncertainty in the sensor information, and the complex interaction with other road participants. A significant amount of research has been carried out toward deploying autonomous vehicles to solve plenty of issues, however, how to deal with the high-level decision-making in a complex, uncertain, and urban environment is a comparatively less explored area. This paper provides an analysis of decision-making solutions approaches for autonomous driving. Various categories of approaches are analyzed with a comparison to classical decision-making approaches. Following, a crucial range of research gaps and open challenges have been highlighted that need to be addressed before higher-level autonomous vehicles hit the roads. We believe this survey will contribute to the research of decision-making methods for autonomous vehicles in the future by equipping the researchers with an overview of decision-making technology, its potential solution approaches, and challenges.
Keywords: autonomous driving; behavioural planning; decision-making.
Conflict of interest statement
The authors declare no conflict of interest.
Figures




References
-
- Batkovic I. Ph.D. Thesis. Chalmers Tekniska Hogskola; Gothenburg, Sweden: 2022. Enabling Safe Autonomous Driving in Uncertain Environments.
-
- Taxonomy and Definitions for Terms Related to Driving Automation Systems for on-Road Motor Vehicles. SAE International; Warrendale, PA, USA: 2016.
-
- Claussmann L., Revilloud M., Gruyer D., Glaser S. A review of motion planning for highway autonomous driving. IEEE Trans. Intell. Transp. Syst. 2019;21:1826–1848. doi: 10.1109/TITS.2019.2913998. - DOI
-
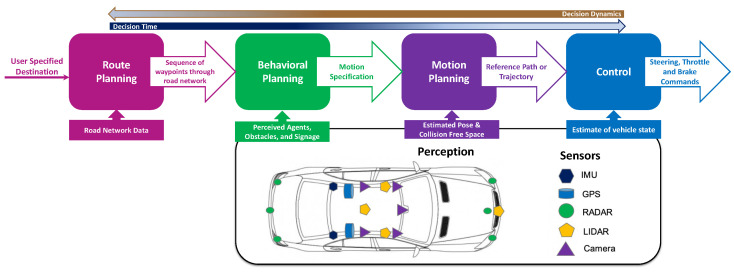
- Pendleton S.D., Andersen H., Du X., Shen X., Meghjani M., Eng Y.H., Rus D., Ang M.H. Perception, planning, control, and coordination for autonomous vehicles. Machines. 2017;5:6. doi: 10.3390/machines5010006. - DOI
-
- Katrakazas C., Quddus M., Chen W.H., Deka L. Real-time motion planning methods for autonomous on-road driving: State-of-the-art and future research directions. Transp. Res. Part C Emerg. Technol. 2015;60:416–442. doi: 10.1016/j.trc.2015.09.011. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
