

Bio-inspired magnetic-driven folded diaphragm for biomimetic robot
- PMID: 36631471
- PMCID: PMC9834404
- DOI: 10.1038/s41467-023-35905-6
Bio-inspired magnetic-driven folded diaphragm for biomimetic robot
Abstract
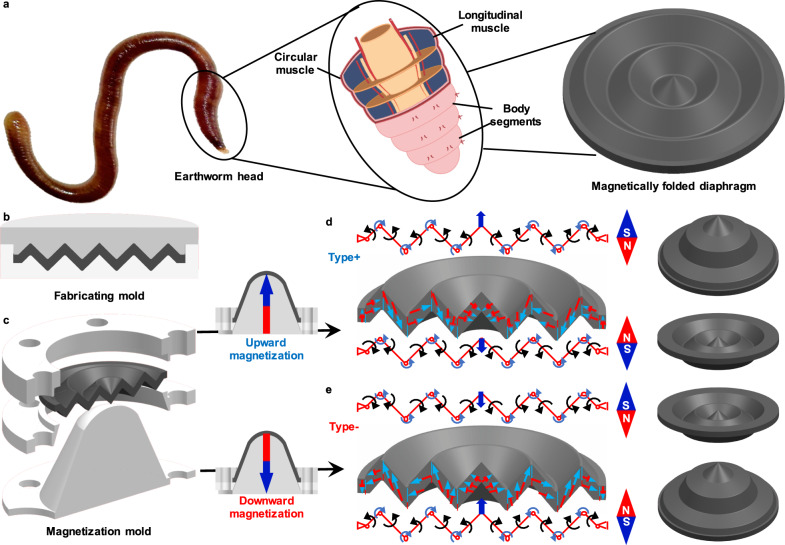
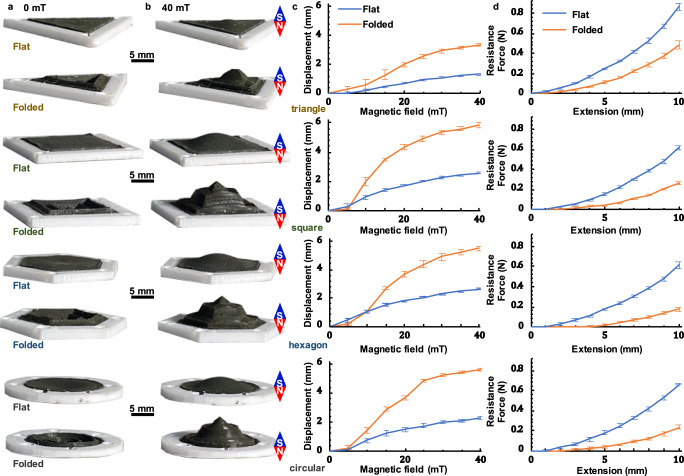
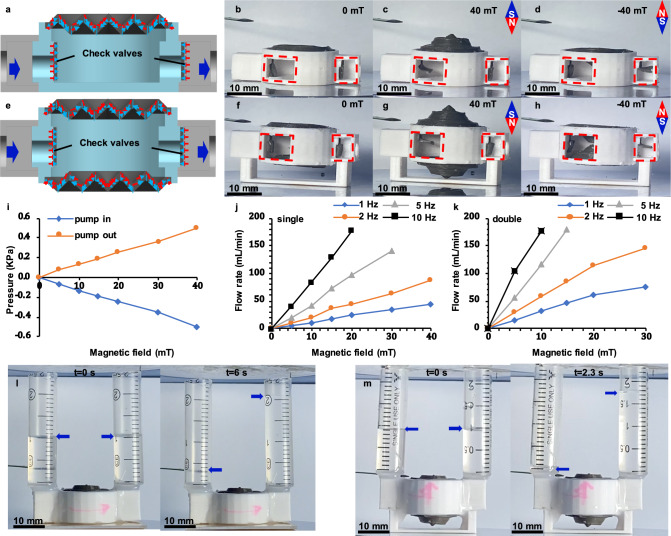
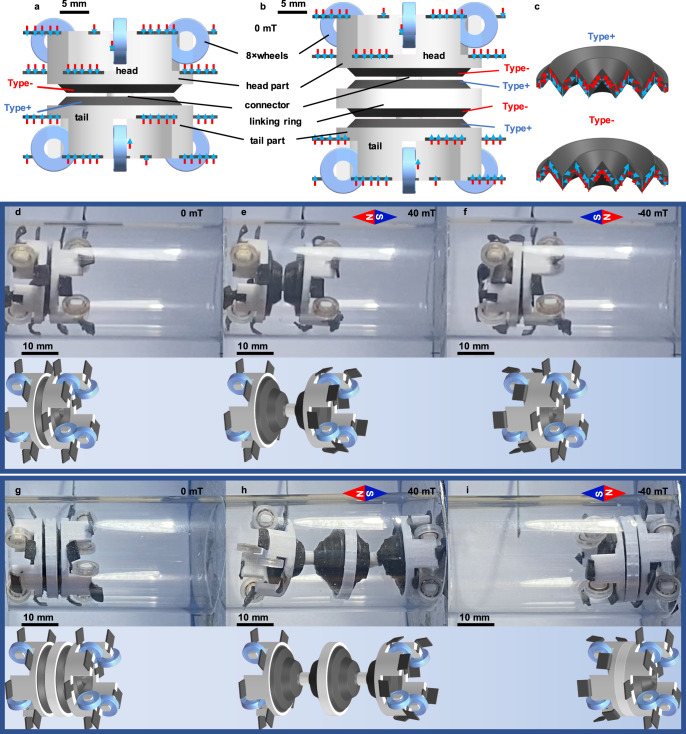
Functional soft materials, exhibiting multiple types of deformation, have shown their potential/abilities to achieve complicated biomimetic behaviors (soft robots). Inspired by the locomotion of earthworm, which is conducted through the contraction and stretching between body segments, this study proposes a type of one-piece-mold folded diaphragm, consisting of the structure of body segments with radial magnetization property, to achieve large 3D and bi-directional deformation with inside-volume change capability subjected to the low homogeneous magnetically driving field (40 mT). Moreover, the appearance based on the proposed magnetic-driven folded diaphragm is able to be easily customized to desired ones and then implanted into different untethered soft robotic systems as soft drivers. To verify the above points, we design the diaphragm pump providing unique properties of lightweight, powerful output and rapid response, and the soft robot including the bio-earthworm crawling robot and swimming robot inspired by squid to exhibit the flexible and rapid locomotion excited by single homogeneous magnetic fields.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures

References
-
- Palagi S, Fischer P. Bioinspired microrobots. Nat. Rev. Mater. 2018;3:113–124. doi: 10.1038/s41578-018-0016-9. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
