

Development of a Wearable Ultrasound Transducer for Sensing Muscle Activities in Assistive Robotics Applications
- PMID: 36671969
- PMCID: PMC9855872
- DOI: 10.3390/bios13010134
Development of a Wearable Ultrasound Transducer for Sensing Muscle Activities in Assistive Robotics Applications
Abstract
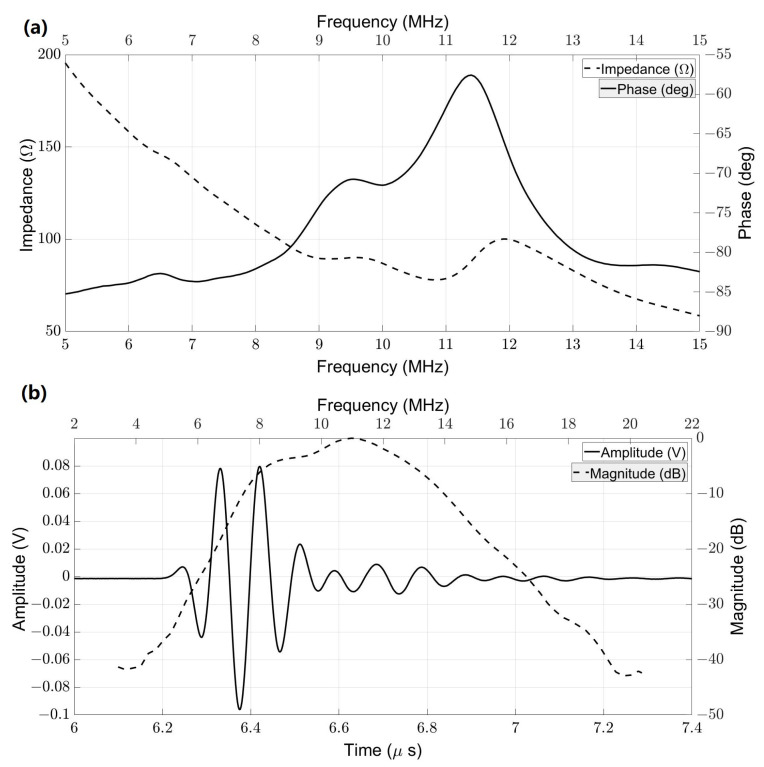
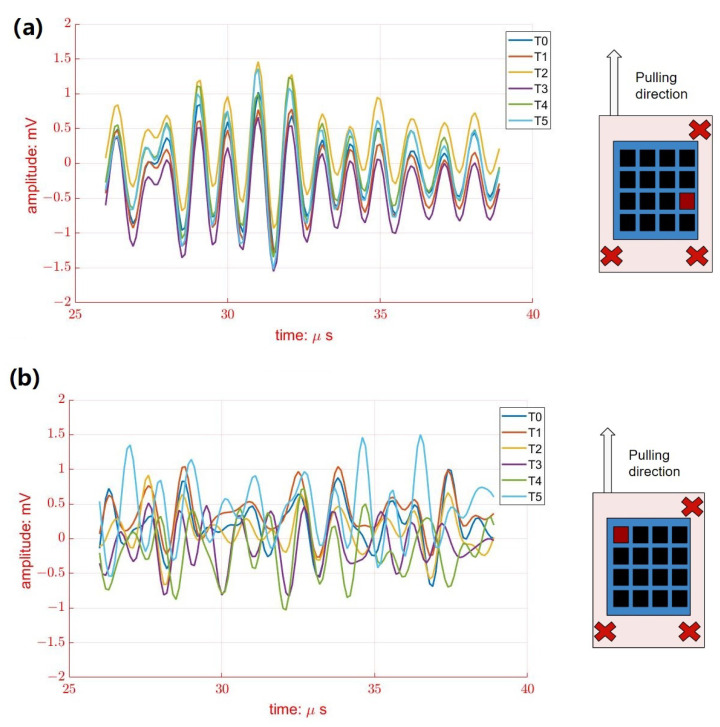
Robotic prostheses and powered exoskeletons are novel assistive robotic devices for modern medicine. Muscle activity sensing plays an important role in controlling assistive robotics devices. Most devices measure the surface electromyography (sEMG) signal for myoelectric control. However, sEMG is an integrated signal from muscle activities. It is difficult to sense muscle movements in specific small regions, particularly at different depths. Alternatively, traditional ultrasound imaging has recently been proposed to monitor muscle activity due to its ability to directly visualize superficial and at-depth muscles. Despite their advantages, traditional ultrasound probes lack wearability. In this paper, a wearable ultrasound (US) transducer, based on lead zirconate titanate (PZT) and a polyimide substrate, was developed for a muscle activity sensing demonstration. The fabricated PZT-5A elements were arranged into a 4 × 4 array and then packaged in polydimethylsiloxane (PDMS). In vitro porcine tissue experiments were carried out by generating the muscle activities artificially, and the muscle movements were detected by the proposed wearable US transducer via muscle movement imaging. Experimental results showed that all 16 elements had very similar acoustic behaviors: the averaged central frequency, -6 dB bandwidth, and electrical impedance in water were 10.59 MHz, 37.69%, and 78.41 Ω, respectively. The in vitro study successfully demonstrated the capability of monitoring local muscle activity using the prototyped wearable transducer. The findings indicate that ultrasonic sensing may be an alternative to standardize myoelectric control for assistive robotics applications.
Keywords: flexible ultrasound transducer; muscle movement; powered exoskeleton; robotic prosthesis; ultrasound imaging; wearable ultrasound transducer.
Conflict of interest statement
The authors declare no conflict to interest.
Figures








References
-
- Miller D.P. Assistive Technology and Artificial Intelligence. Springer; Berlin/Heidelberg, Germany: 1998. Assistive robotics: An overview; pp. 126–136.
-
- Össur PowerKnee. 2022. [(accessed on 1 January 2023)]. Available online: https://www.ossur.com/en-us/prosthetics/knees/power-knee.
-
- Jayaraman C., Hoppe-Ludwig S., Deems-Dluhy S., McGuire M., Mummidisetty C., Siegal R., Naef A., Lawson B.E., Goldfarb M., Gordon K.E., et al. Impact of powered knee-ankle prosthesis on low back muscle mechanics in transfemoral amputees: A case series. Front. Neurosci. 2018;12:134. doi: 10.3389/fnins.2018.00134. - DOI - PMC - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
