

Vanishing Opinions in Latané Model of Opinion Formation
- PMID: 36673198
- PMCID: PMC9858223
- DOI: 10.3390/e25010058
Vanishing Opinions in Latané Model of Opinion Formation
Abstract
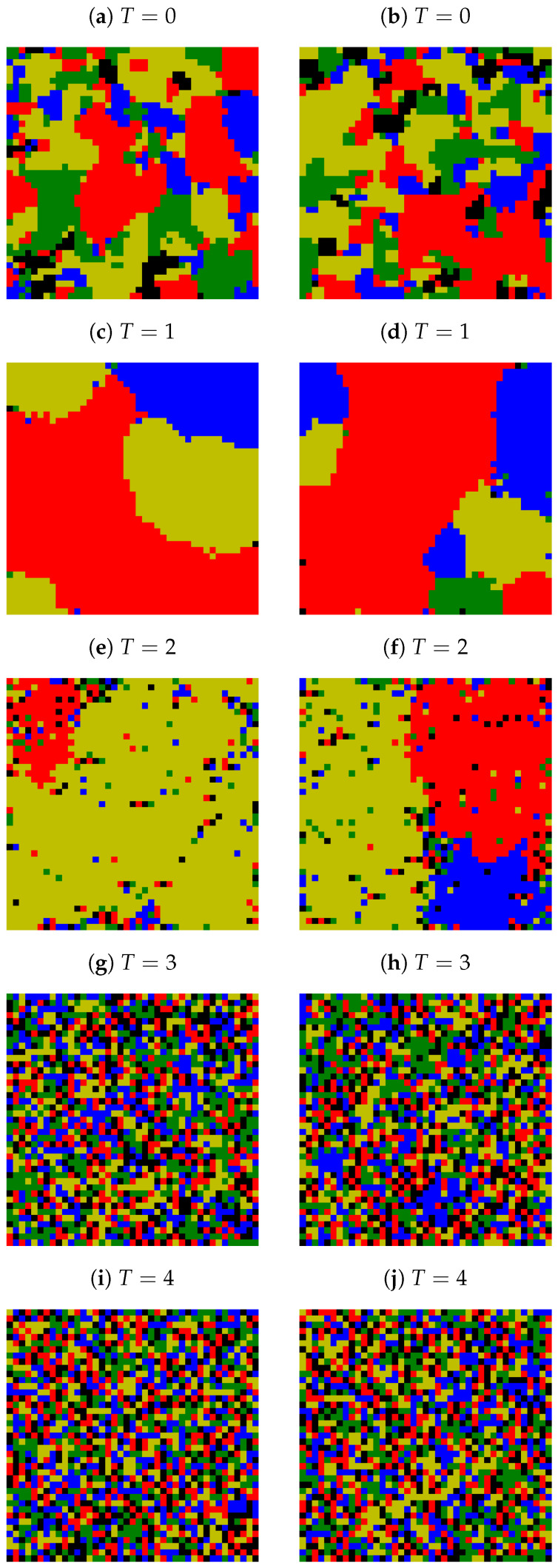
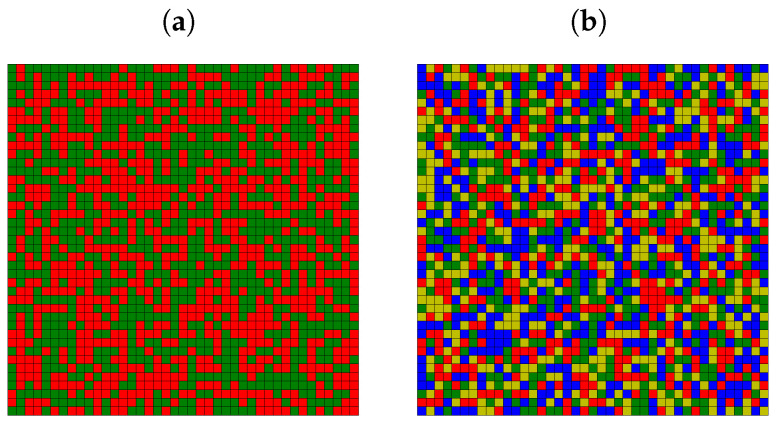
In this paper, the results of computer simulations based on the Nowak-Szamrej-Latané model with multiple (from two to five) opinions available in the system are presented. We introduce the noise discrimination level (which says how small the clusters of agents could be considered negligible) as a quite useful quantity that allows qualitative characterization of the system. We show that depending on the introduced noise discrimination level, the range of actors' interactions (controlled indirectly by an exponent in the distance scaling function, the larger the exponent, the more influential the nearest neighbors are) and the information noise level (modeled as social temperature, which increases results in the increase in randomness in taking the opinion by the agents), the ultimate number of the opinions (measured as the number of clusters of actors sharing the same opinion in clusters greater than the noise discrimination level) may be smaller than the number of opinions available in the system. These are observed in small and large information noise limits but result in either unanimity, or polarization, or randomization of opinions.
Keywords: clusterization and polarization; information noise; opinion dynamics; social impact; sociophysics.
Conflict of interest statement
The authors declare no conflict of interest.
Figures




















References
-
- Muslim R., Kholili M., Nugraha A. Opinion dynamics involving contrarian and independence behaviors based on the Sznajd model with two-two and three-one agent interactions. Phys. D Nonlinear Phenom. 2022;439:133379. doi: 10.1016/j.physd.2022.133379. - DOI
LinkOut - more resources
Full Text Sources
