

How the Processing Mode Influences Azure Kinect Body Tracking Results
- PMID: 36679675
- PMCID: PMC9860777
- DOI: 10.3390/s23020878
How the Processing Mode Influences Azure Kinect Body Tracking Results
Abstract
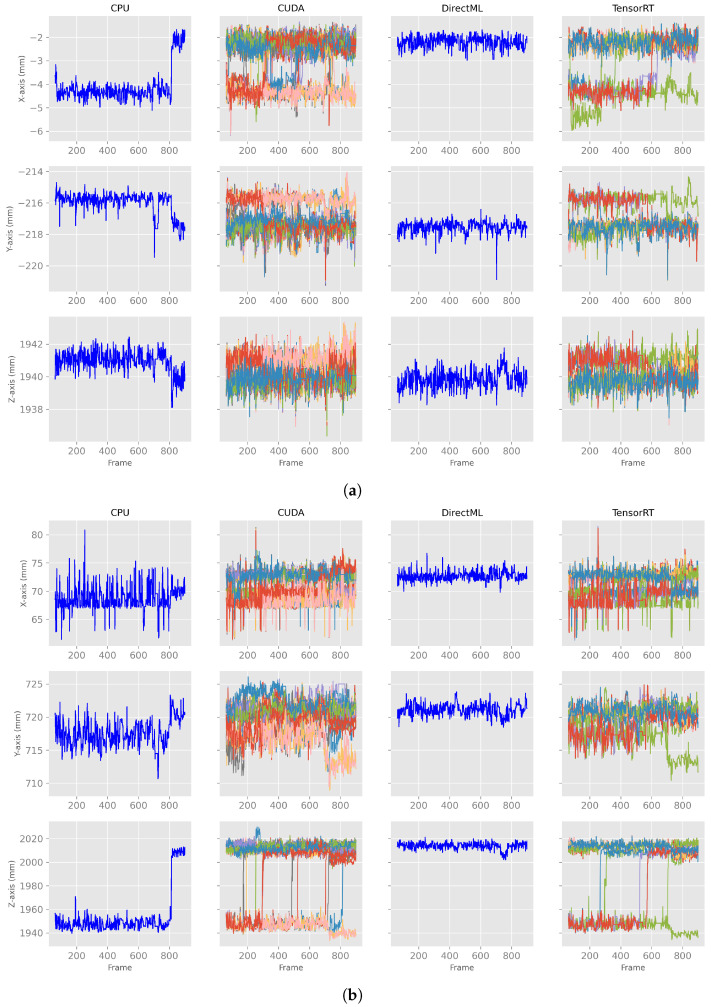
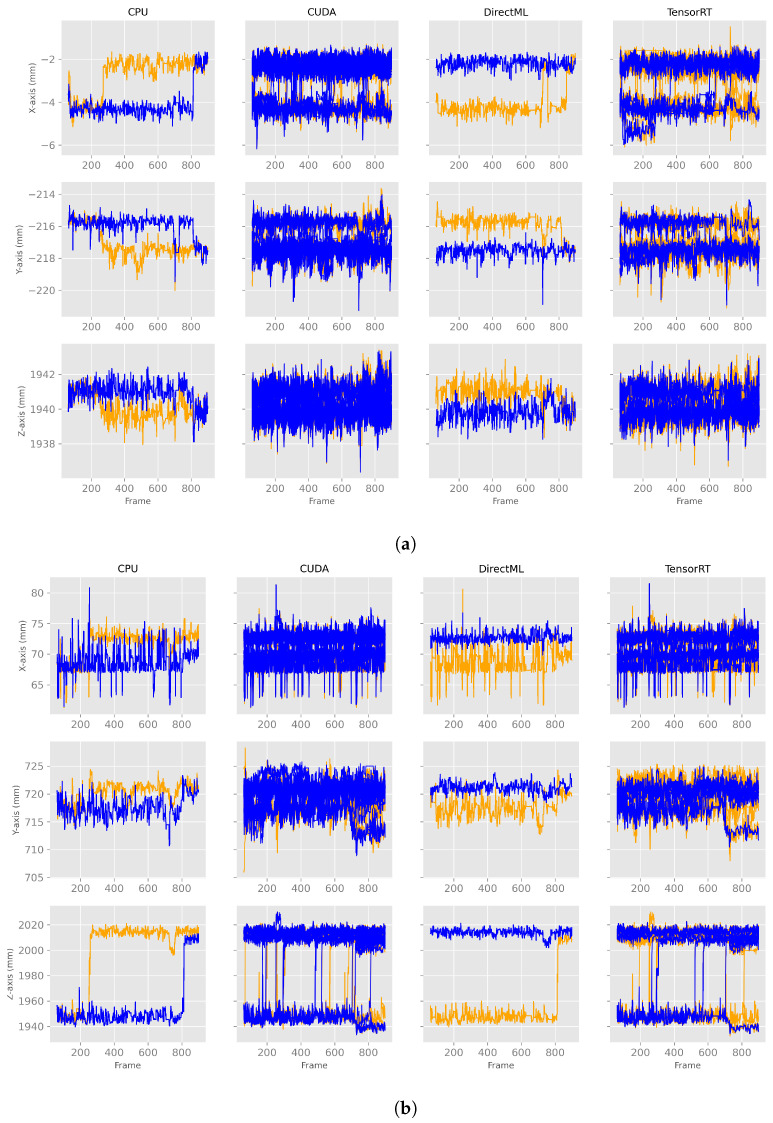
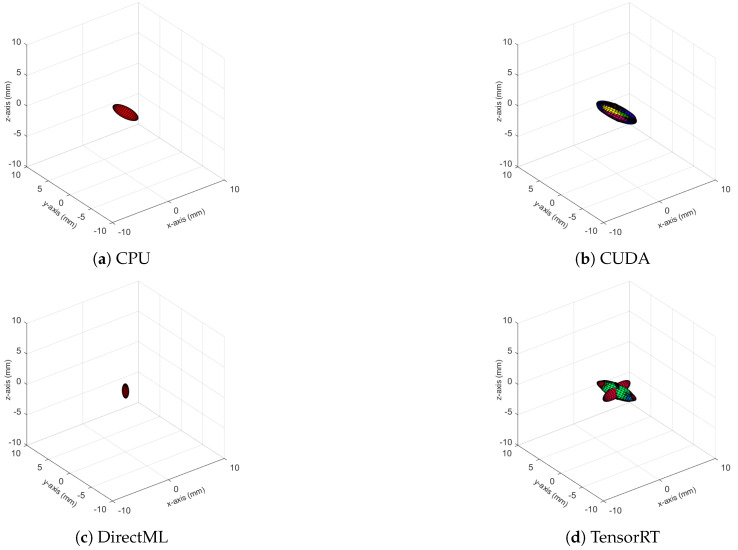
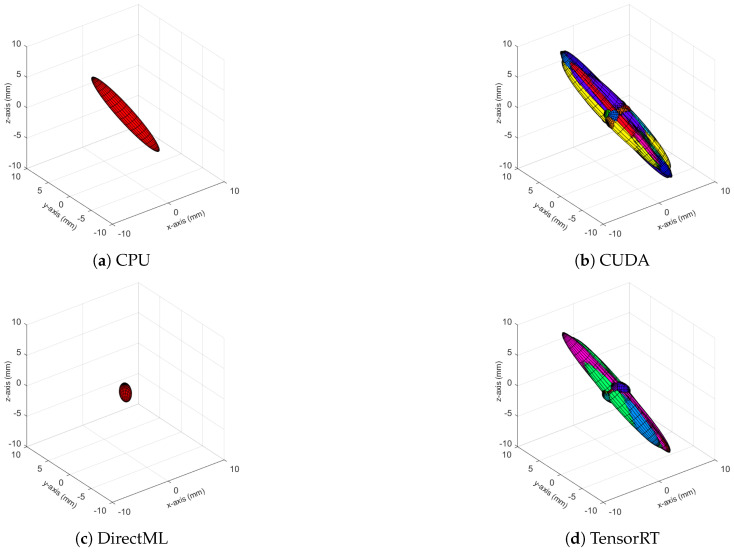
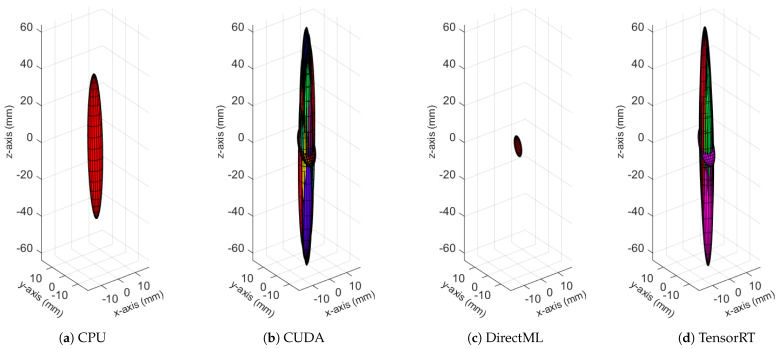
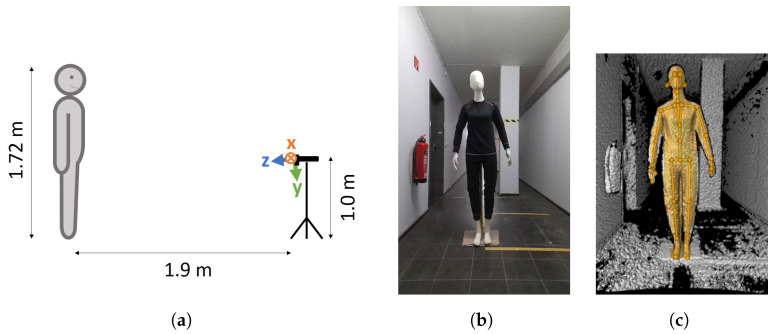
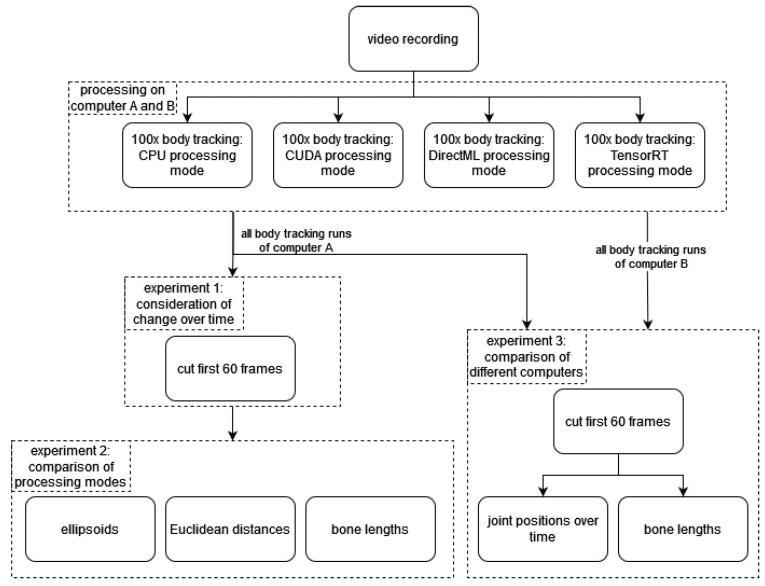
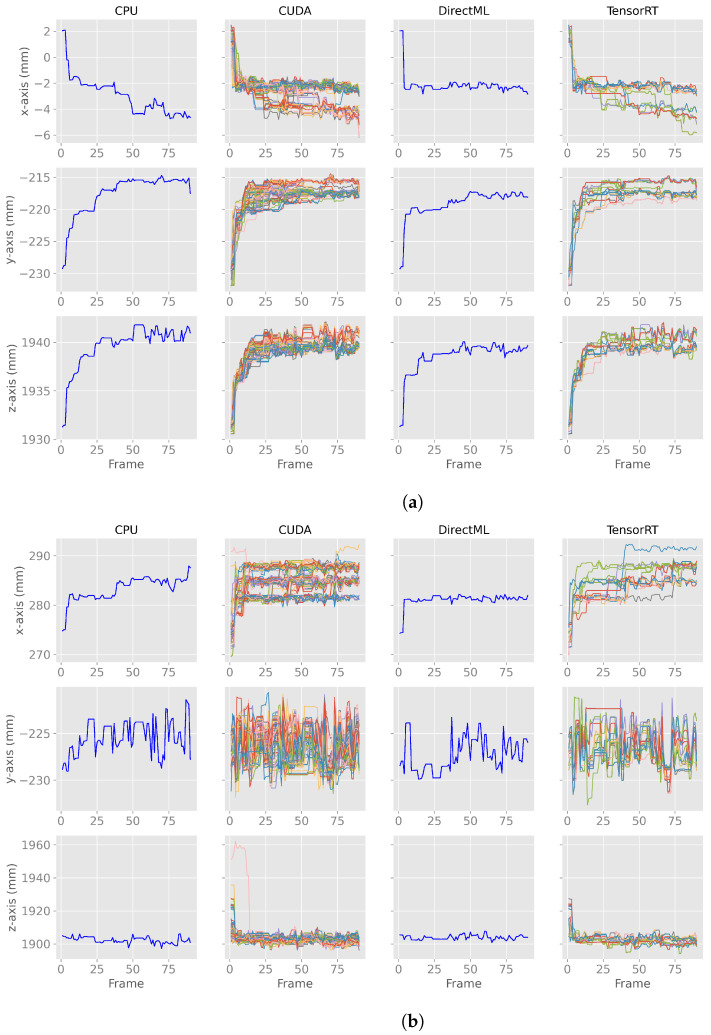
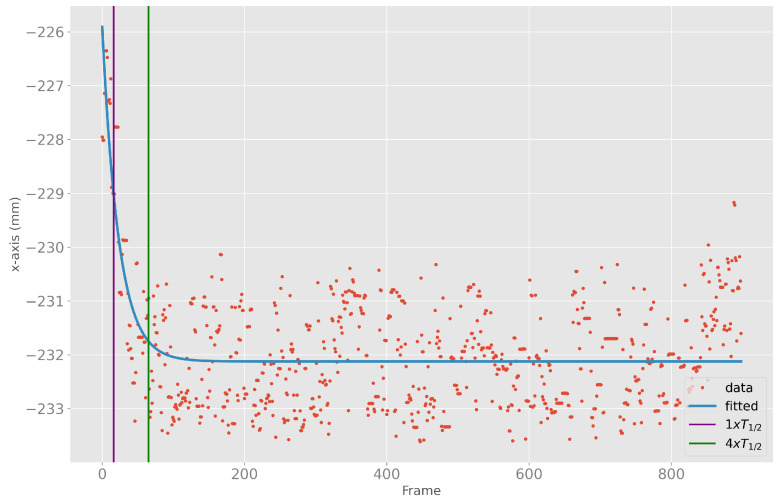
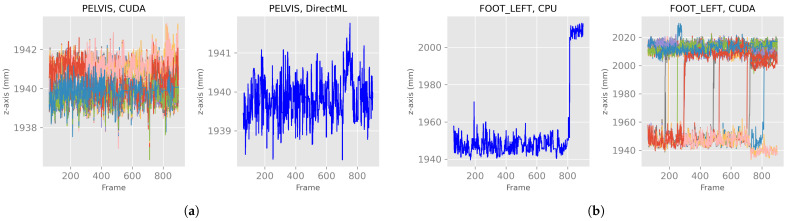
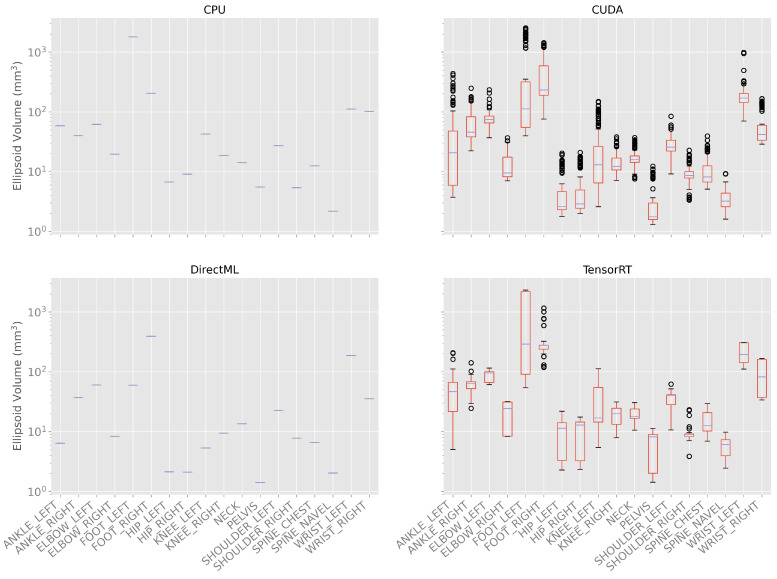
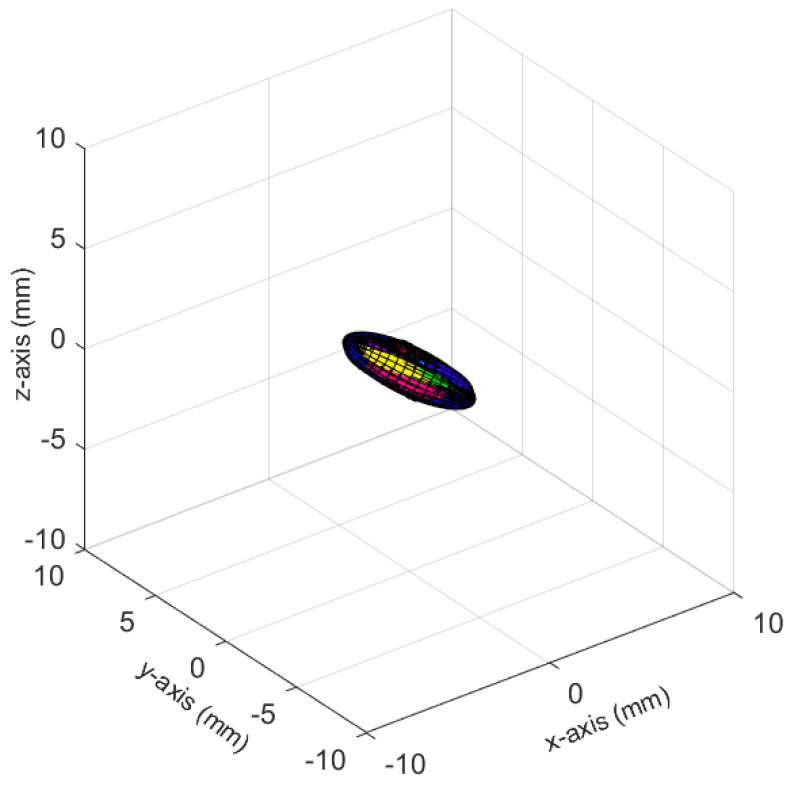
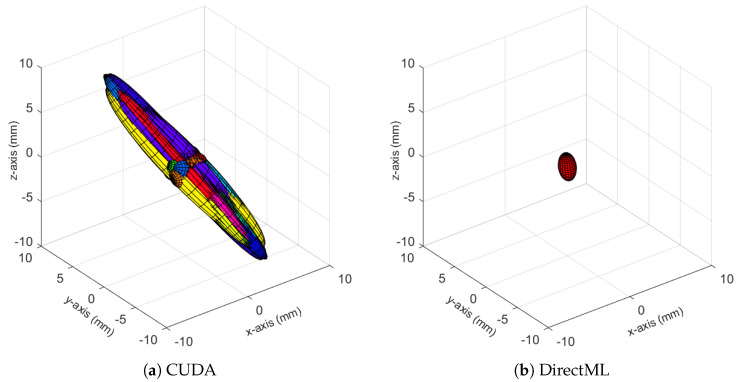
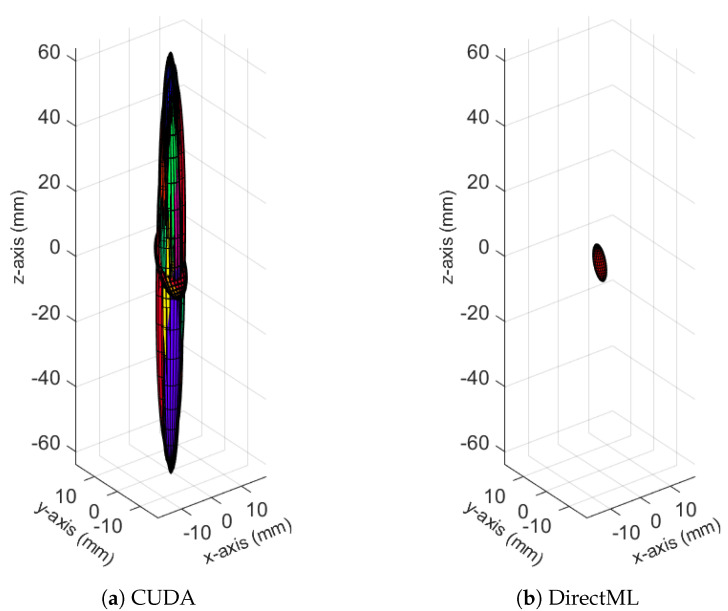
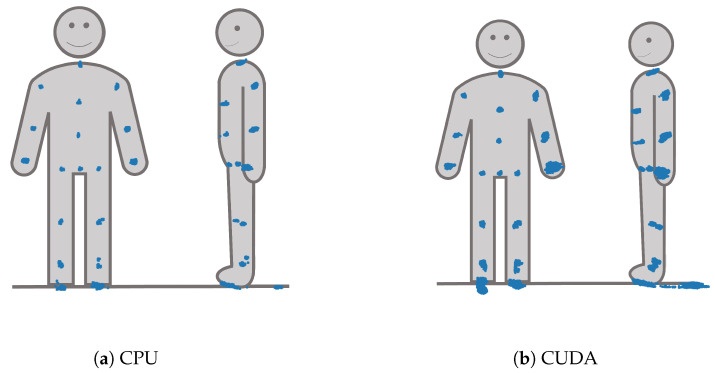
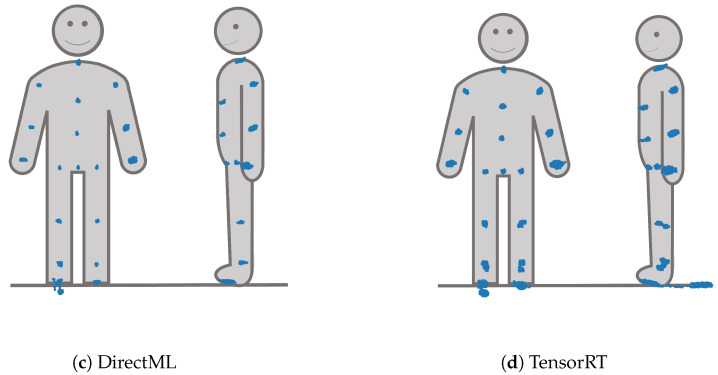
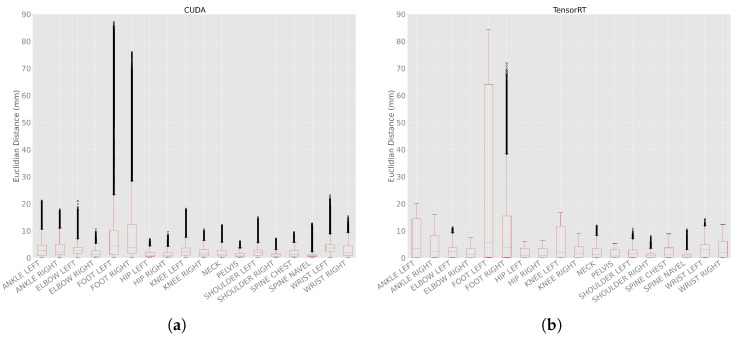
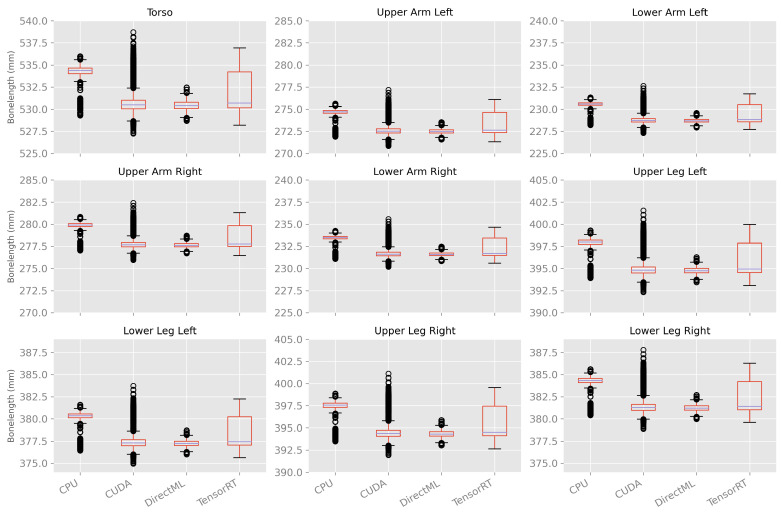
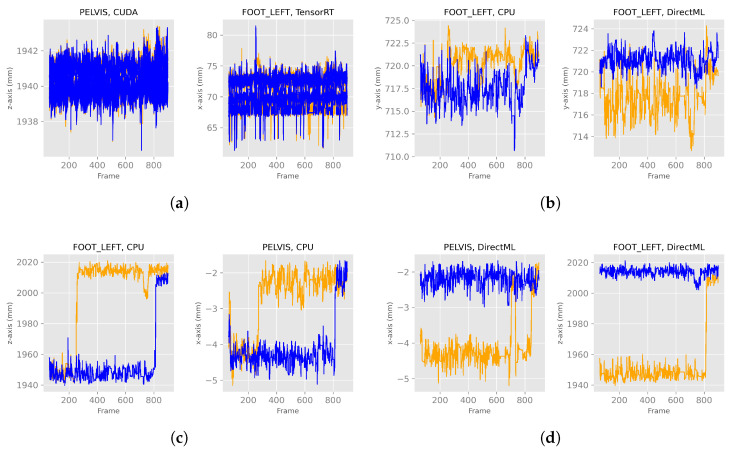
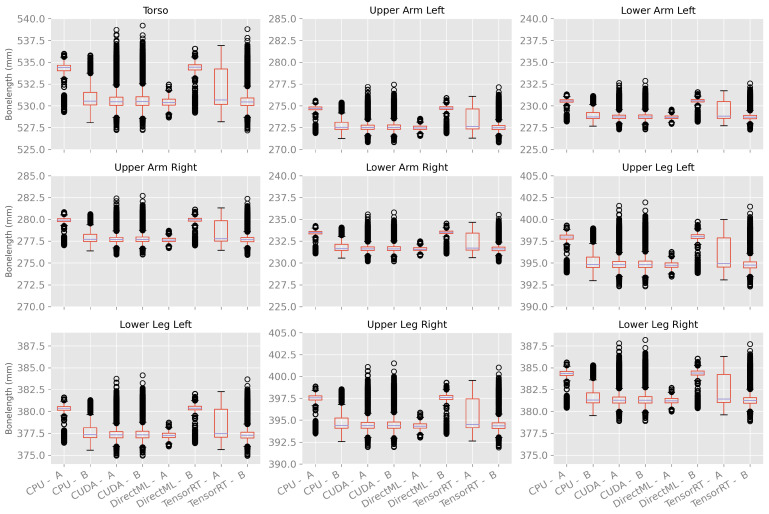
The Azure Kinect DK is an RGB-D-camera popular in research and studies with humans. For good scientific practice, it is relevant that Azure Kinect yields consistent and reproducible results. We noticed the yielded results were inconsistent. Therefore, we examined 100 body tracking runs per processing mode provided by the Azure Kinect Body Tracking SDK on two different computers using a prerecorded video. We compared those runs with respect to spatiotemporal progression (spatial distribution of joint positions per processing mode and run), derived parameters (bone length), and differences between the computers. We found a previously undocumented converging behavior of joint positions at the start of the body tracking. Euclidean distances of joint positions varied clinically relevantly with up to 87 mm between runs for CUDA and TensorRT; CPU and DirectML had no differences on the same computer. Additionally, we found noticeable differences between two computers. Therefore, we recommend choosing the processing mode carefully, reporting the processing mode, and performing all analyses on the same computer to ensure reproducible results when using Azure Kinect and its body tracking in research. Consequently, results from previous studies with Azure Kinect should be reevaluated, and until then, their findings should be interpreted with caution.
Keywords: Azure Kinect; Azure Kinect Body Tracking SDK; body tracking; quality assurance; reproducibility; skeleton tracking.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Alaoui H., Moutacalli M.T., Adda M. AI-Enabled High-Level Layer for Posture Recognition Using The Azure Kinect in Unity3D; Proceedings of the 2020 IEEE 4th International Conference on Image Processing, Applications and Systems (IPAS); Genova, Italy. 9–11 December 2020; pp. 155–161. - DOI
-
- Sekiguchi S., Li L., Ko N.Y., Choi W. Posture Recognition System using Depth Sensor; Proceedings of the 2021 21st International Conference on Control, Automation and Systems (ICCAS); Jeju, Korea. 12–15 October 2021; pp. 1463–1466. - DOI
-
- Microsoft Inc. Azure Kinect DK Hardware Specifications. [(accessed on 25 July 2022)]. Available online: https://docs.microsoft.com/en-us/azure/Kinect-dk/hardware-specification.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
