

Entorhinal-hippocampal interactions lead to globally coherent representations of space
- PMID: 36685760
- PMCID: PMC9846457
- DOI: 10.1016/j.crneur.2022.100035
Entorhinal-hippocampal interactions lead to globally coherent representations of space
Abstract
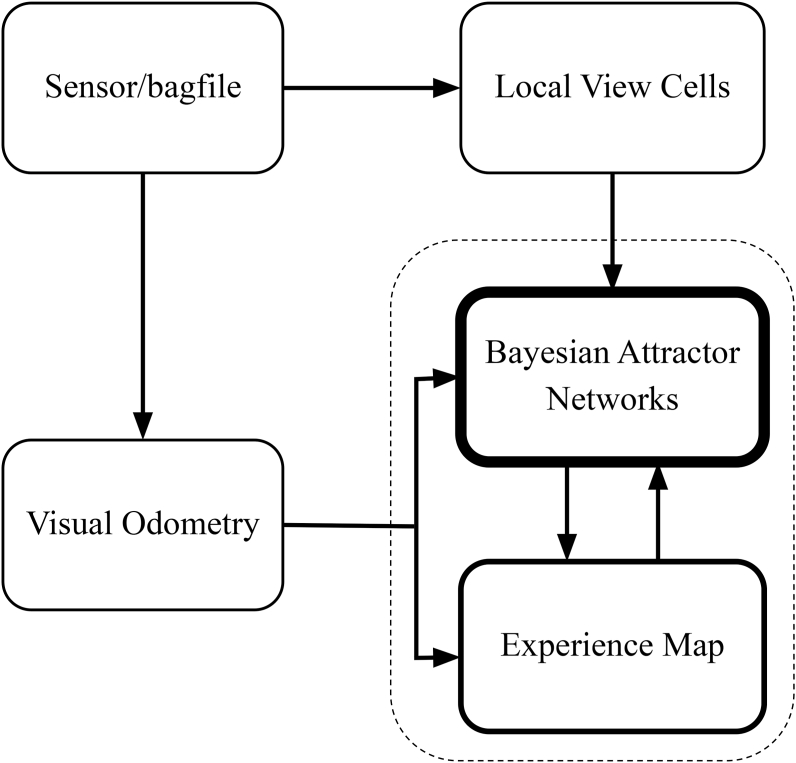
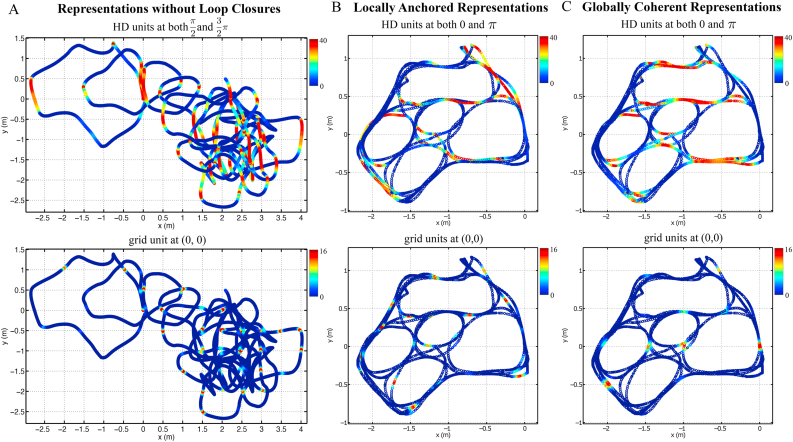
The firing maps of grid cells in the entorhinal cortex are thought to provide an efficient metric system capable of supporting spatial inference in all environments. However, whether spatial representations of grid cells are determined by local environment cues or are organized into globally coherent patterns remains undetermined. We propose a navigation model containing a path integration system in the entorhinal cortex and a cognitive map system in the hippocampus. In the path integration system, grid cell network and head direction (HD) cell network integrate movement and visual information, and form attractor states to represent the positions and head directions of the animal. In the cognitive map system, a topological map is constructed capturing the attractor states of the path integration system as nodes and the transitions between attractor states as links. On loop closure, when the animal revisits a familiar place, the topological map is calibrated to minimize odometry errors. The change of the topological map is mapped back to the path integration system, to correct the states of the grid cells and the HD cells. The proposed model was tested on iRat, a rat-like miniature robot, in a realistic maze. Experimental results showed that, after familiarization of the environment, both grid cells and HD cells develop globally coherent firing maps by map calibration and activity correction. These results demonstrate that the hippocampus and the entorhinal cortex work together to form globally coherent metric representations of the environment. The underlying mechanisms of the hippocampal-entorhinal circuit in capturing the structure of the environment from sequences of experience are critical for understanding episodic memory.
Keywords: Global representations; Grid cells; Head direction cells; Local environment anchors; Simultaneous localization and mapping.
© 2022 The Authors.
Conflict of interest statement
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Figures










Similar articles
-
Cognitive Mapping Based on Conjunctive Representations of Space and Movement.Front Neurorobot. 2017 Nov 22;11:61. doi: 10.3389/fnbot.2017.00061. eCollection 2017. Front Neurorobot. 2017. PMID: 29213234 Free PMC article.
-
Multi-Scale Extension in an Entorhinal-Hippocampal Model for Cognitive Map Building.Front Neurorobot. 2021 Jan 14;14:592057. doi: 10.3389/fnbot.2020.592057. eCollection 2020. Front Neurorobot. 2021. PMID: 33519410 Free PMC article.
-
Attractor-like Dynamics in the Subicular Complex.J Neurosci. 2022 Oct 5;42(40):7594-7614. doi: 10.1523/JNEUROSCI.2048-20.2022. Epub 2022 Aug 26. J Neurosci. 2022. PMID: 36028315 Free PMC article.
-
Environmental boundaries as a mechanism for correcting and anchoring spatial maps.J Physiol. 2016 Nov 15;594(22):6501-6511. doi: 10.1113/JP270624. Epub 2016 Jan 5. J Physiol. 2016. PMID: 26563618 Free PMC article. Review.
-
The chicken and egg problem of grid cells and place cells.Trends Cogn Sci. 2023 Feb;27(2):125-138. doi: 10.1016/j.tics.2022.11.003. Epub 2022 Nov 24. Trends Cogn Sci. 2023. PMID: 36437188 Review.
References
-
- Agarwal S., Mierle K., et al. 2012. Ceres Solver.
-
- Aulinas J., Petillot Y., Salvi J., Lladó X. Artificial Intelligence Research and Development; 2008. The Slam Problem: a Survey; pp. 363–371.
-
- Ball D., Heath S., Wiles J., Wyeth G., Corke P., Milford M. OpenRatSLAM: an open source brain-based SLAM system. Aut. Robots. 2013;34(3):149–176.
-
- Ball D., Heath S., Wyeth G., Wiles J. Proceedings of the 2010 Australasian Conference on Robotics and Automation. 2010. IRat: Intelligent rat animat technology; pp. 1–3.
Publication types
LinkOut - more resources
Full Text Sources
