

Using robot-assisted stiffness perturbations to evoke aftereffects useful to post-stroke gait rehabilitation
- PMID: 36686210
- PMCID: PMC9846529
- DOI: 10.3389/frobt.2022.1073746
Using robot-assisted stiffness perturbations to evoke aftereffects useful to post-stroke gait rehabilitation
Abstract
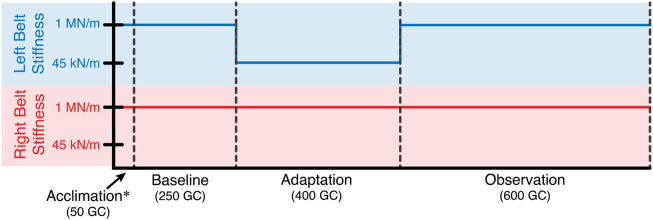
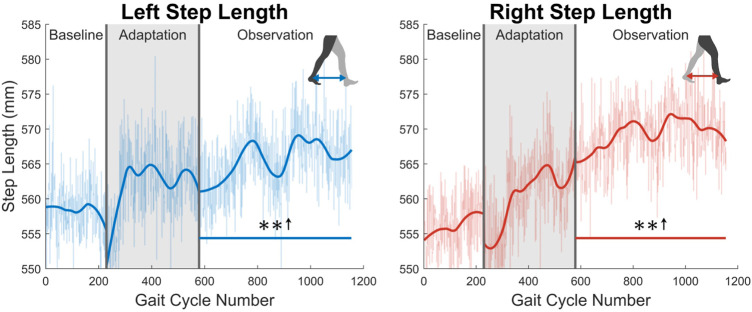
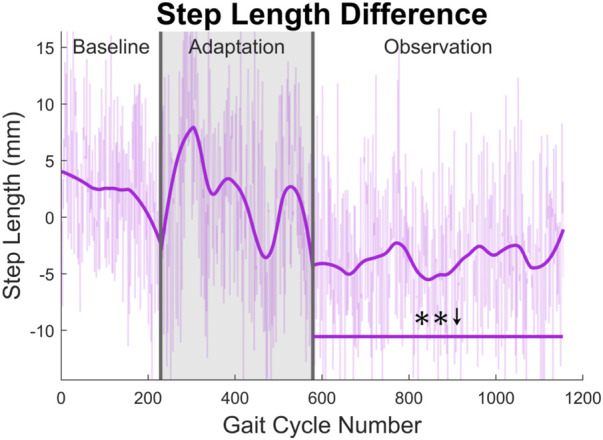
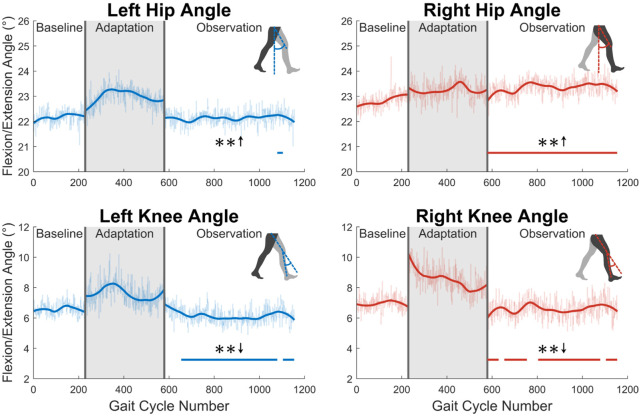
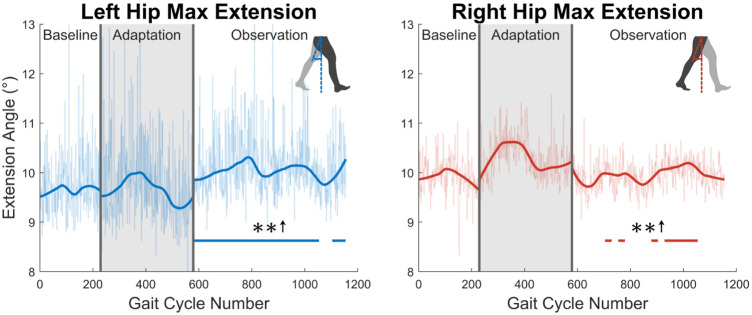
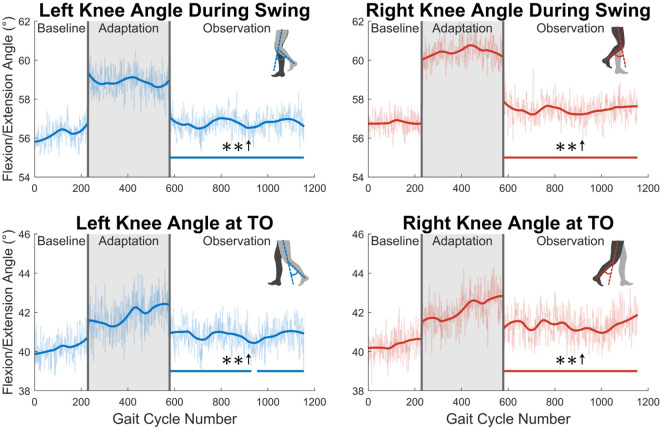
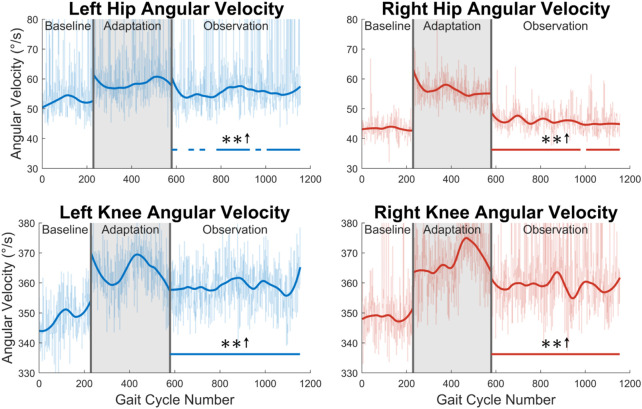
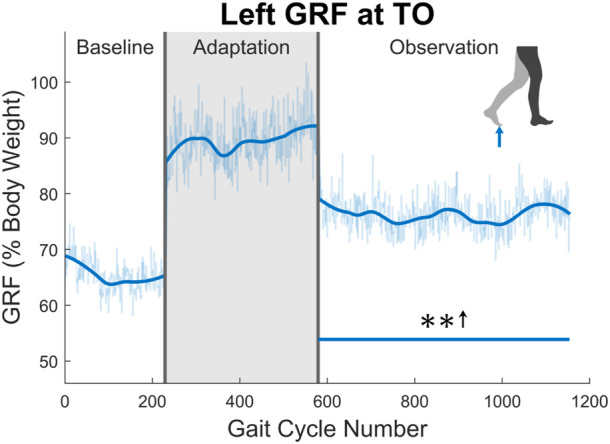
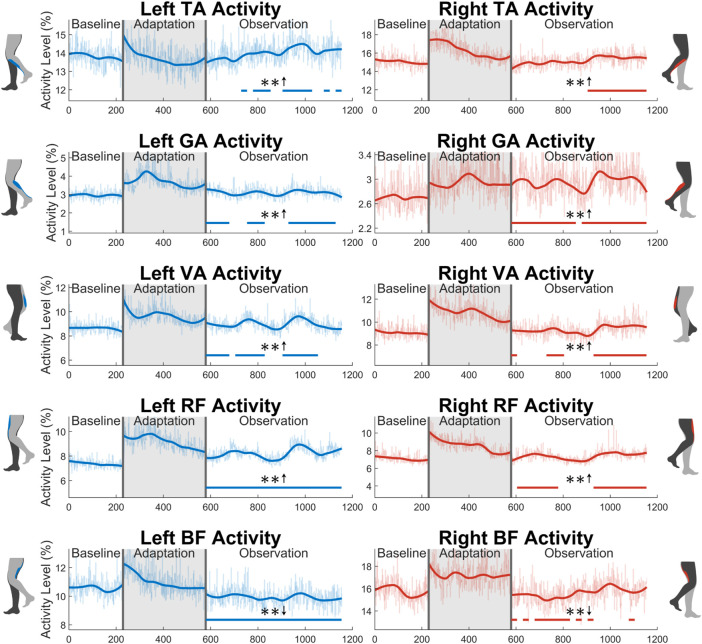
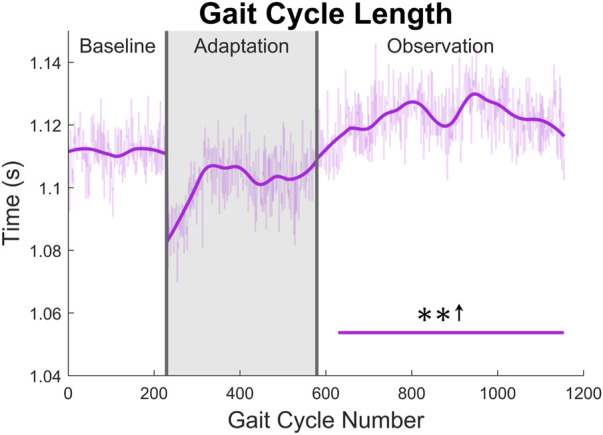
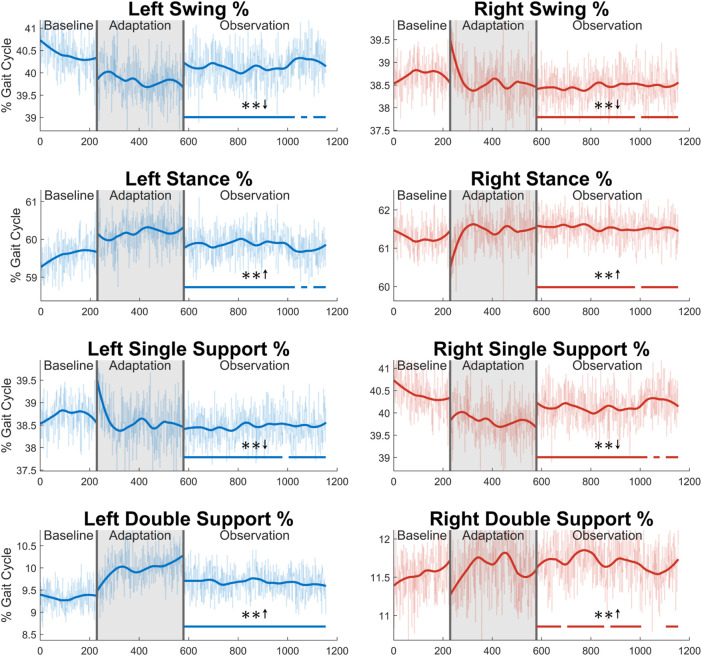
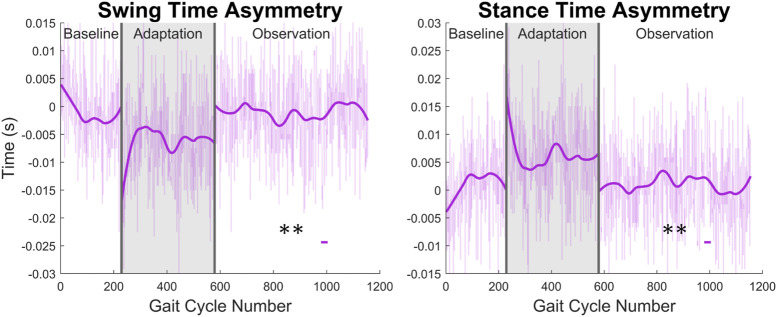
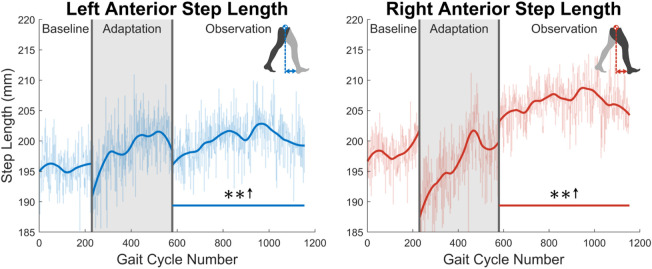
Stroke is a major global issue, affecting millions every year. When a stroke occurs, survivors are often left with physical disabilities or difficulties, frequently marked by abnormal gait. Post-stroke gait normally presents as one of or a combination of unilaterally shortened step length, decreased dorsiflexion during swing phase, and decreased walking speed. These factors lead to an increased chance of falling and an overall decrease in quality of life due to a reduced ability to locomote quickly and safely under one's own power. Many current rehabilitation techniques fail to show lasting results that suggest the potential for producing permanent changes. As technology has advanced, robot-assisted rehabilitation appears to have a distinct advantage, as the precision and repeatability of such an intervention are not matched by conventional human-administered therapy. The possible role in gait rehabilitation of the Variable Stiffness Treadmill (VST), a unique, robotic treadmill, is further investigated in this paper. The VST is a split-belt treadmill that can reduce the vertical stiffness of one of the belts, while the other belt remains rigid. In this work, we show that the repeated unilateral stiffness perturbations created by this device elicit an aftereffect of increased step length that is seen for over 575 gait cycles with healthy subjects after a single 10-min intervention. These long aftereffects are currently unmatched in the literature according to our knowledge. This step length increase is accompanied by kinematics and muscle activity aftereffects that help explain functional changes and have their own independent value when considering the characteristics of post-stroke gait. These results suggest that repeated unilateral stiffness perturbations could possibly be a useful form of post-stroke gait rehabilitation.
Keywords: adaptation; aftereffects; gait; rehabilitation; robotics; stroke; treadmill; walking.
Copyright © 2023 Chambers and Artemiadis.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures

Similar articles
-
ROBOT-ASSISTED TARGETED GAIT TRAINING.J Kinesiol Exerc Sci. 2024 Feb 22;34(105):11-22. doi: 10.5604/01.3001.0053.9679. Epub 2023 Oct 26. J Kinesiol Exerc Sci. 2024. PMID: 38770104 Free PMC article.
-
A Model-Based Analysis of Supraspinal Mechanisms of Inter-Leg Coordination in Human Gait: Toward Model-Informed Robot-Assisted Rehabilitation.IEEE Trans Neural Syst Rehabil Eng. 2021;29:740-749. doi: 10.1109/TNSRE.2021.3072771. Epub 2021 Apr 26. IEEE Trans Neural Syst Rehabil Eng. 2021. PMID: 33844630
-
Comparing aftereffects after split-belt treadmill walking and unilateral stepping.Med Sci Sports Exerc. 2014 Jul;46(7):1392-9. doi: 10.1249/MSS.0000000000000240. Med Sci Sports Exerc. 2014. PMID: 24389526 Free PMC article.
-
Understanding Human Neural Control of Short-term Gait Adaptation to the Split-belt Treadmill.Neuroscience. 2020 Dec 15;451:36-50. doi: 10.1016/j.neuroscience.2020.09.055. Epub 2020 Oct 8. Neuroscience. 2020. PMID: 33039522
-
The Effect of Split-Belt Treadmill Interventions on Step Length Asymmetry in Individuals Poststroke: A Systematic Review With Meta-Analysis.Neurorehabil Neural Repair. 2021 Jul;35(7):563-575. doi: 10.1177/15459683211011226. Epub 2021 May 12. Neurorehabil Neural Repair. 2021. PMID: 33978525
Cited by
-
The Variable Stiffness Treadmill 2: Development and Validation of a Unique Tool to Investigate Locomotion on Compliant Terrains.J Mech Robot. 2025 Mar;17(3):031005. doi: 10.1115/1.4066173. Epub 2024 Sep 3. J Mech Robot. 2025. PMID: 40365138 Free PMC article.
-
ROBOT-ASSISTED TARGETED GAIT TRAINING.J Kinesiol Exerc Sci. 2024 Feb 22;34(105):11-22. doi: 10.5604/01.3001.0053.9679. Epub 2023 Oct 26. J Kinesiol Exerc Sci. 2024. PMID: 38770104 Free PMC article.
-
A Comprehensive Understanding of Postural Tone Biomechanics: Intrinsic Stiffness, Functional Stiffness, Antagonist Coactivation, and COP Dynamics in Post-Stroke Adults.Sensors (Basel). 2025 Mar 30;25(7):2196. doi: 10.3390/s25072196. Sensors (Basel). 2025. PMID: 40218708 Free PMC article.
-
Kinematics, kinetics, and muscle activations during human locomotion over compliant terrains.Sci Data. 2025 Jan 16;12(1):84. doi: 10.1038/s41597-025-04433-x. Sci Data. 2025. PMID: 39819980 Free PMC article.
References
-
- Barkan A., Skidmore J., Artemiadis P. (2014). “Variable stiffness treadmill (VST): A novel tool for the investigation of gait,” in Proceedings - IEEE international conference on robotics and automation (Hong Kong, China: Institute of Electrical and Electronics Engineers Inc.), 2838–2843. 10.1109/ICRA.2014.6907266 - DOI
-
- Chambers V., Artemiadis P. (2022). “Repeated robot-assisted unilateral stiffness perturbations result in significant aftereffects relevant to post-stroke gait rehabilitation,” in IEEE international conference on robotics and automation (ICRA) (IEEE; ), 5426–5433.
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Research Materials