

Modelling the interaction between wearable assistive devices and digital human models-A systematic review
- PMID: 36704313
- PMCID: PMC9872199
- DOI: 10.3389/fbioe.2022.1044275
Modelling the interaction between wearable assistive devices and digital human models-A systematic review
Abstract
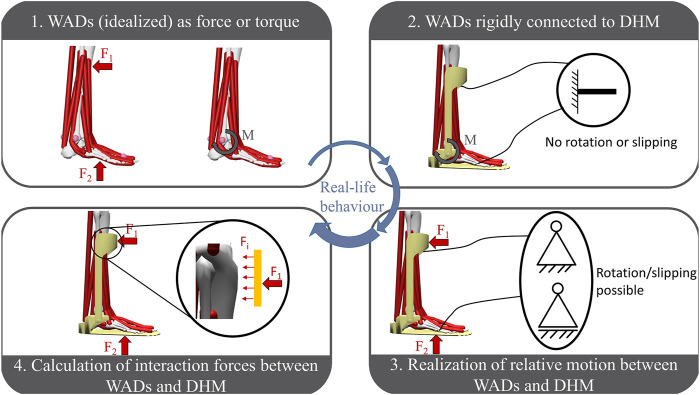
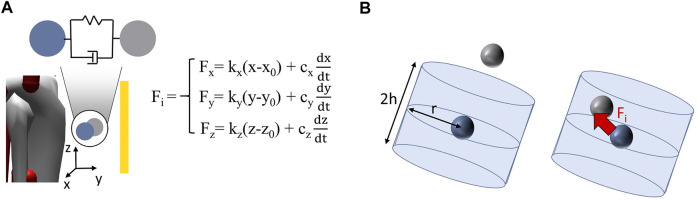
Exoskeletons, orthoses, exosuits, assisting robots and such devices referred to as wearable assistive devices are devices designed to augment or protect the human body by applying and transmitting force. Due to the problems concerning cost- and time-consuming user tests, in addition to the possibility to test different configurations of a device, the avoidance of a prototype and many more advantages, digital human models become more and more popular for evaluating the effects of wearable assistive devices on humans. The key indicator for the efficiency of assistance is the interface between device and human, consisting mainly of the soft biological tissue. However, the soft biological tissue is mostly missing in digital human models due to their rigid body dynamics. Therefore, this systematic review aims to identify interaction modelling approaches between wearable assistive devices and digital human models and especially to study how the soft biological tissue is considered in the simulation. The review revealed four interaction modelling approaches, which differ in their accuracy to recreate the occurring interactions in reality. Furthermore, within these approaches there are some incorporating the appearing relative motion between device and human body due to the soft biological tissue in the simulation. The influence of the soft biological tissue on the force transmission due to energy absorption on the other side is not considered in any publication yet. Therefore, the development of an approach to integrate the viscoelastic behaviour of soft biological tissue in the digital human models could improve the design of the wearable assistive devices and thus increase its efficiency and efficacy.
Keywords: digital human model; interaction modelling; multi-body dynamic; musculoskeletal modelling; soft tissue; systematic review; wearable assistive device.
Copyright © 2023 Scherb, Wartzack and Miehling.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
References
-
- Afschrift M., Groote F. de, Schutter J. de, Jonkers I. (2014). The effect of muscle weakness on the capability gap during gross motor function: A simulation study supporting design criteria for exoskeletons of the lower limb. Biomed. Eng. Online 13, 111. 10.1186/1475-925X-13-111 - DOI - PMC - PubMed
-
- AnyBody Technology (2022). The AnyBody modeling system (version 7.4.x). Available from: http://www.anybodytech.com .
Publication types
LinkOut - more resources
Full Text Sources