

Control of high-speed jumps: the rotation and energetics of the locust (Schistocerca gregaria)
- PMID: 36715704
- PMCID: PMC9992258
- DOI: 10.1007/s00360-022-01471-4
Control of high-speed jumps: the rotation and energetics of the locust (Schistocerca gregaria)
Abstract
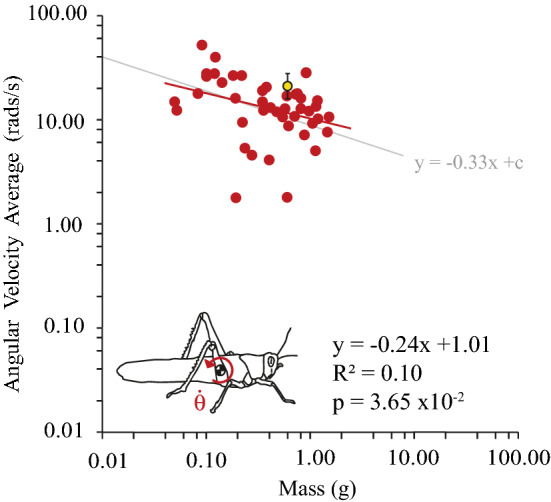
Locusts (Schistocerca gregaria) jump using a latch mediated spring actuated system in the femur-tibia joint of their metathoracic legs. These jumps are exceptionally fast and display angular rotation immediately after take-off. In this study, we focus on the angular velocity, at take-off, of locusts ranging between 0.049 and 1.50 g to determine if and how rotation-rate scales with size. From 263 jumps recorded from 44 individuals, we found that angular velocity scales with mass-0.33, consistent with a hypothesis of locusts having a constant rotational kinetic energy density. Within the data from each locust, angular velocity increased proportionally with linear velocity, suggesting the two cannot be independently controlled and thus a fixed energy budget is formed at take-off. On average, the energy budget of a jump is distributed 98.7% to translational kinetic energy and gravitational potential energy, and 1.3% to rotational kinetic energy. The percentage of energy devoted to rotation was constant across all sizes of locusts and represents a very small proportion of the energy budget. This analysis suggests that smaller locusts find it harder to jump without body rotation.
Keywords: Biomechanics; Energy budget; Invertebrate; Jumping; LaMSA; Pitch.
© 2023. The Author(s).
Conflict of interest statement
The authors have no conflicts of interest.
Figures




References
-
- Alexander RM. Elastic mechanisms in animal movement. Cambridge: Cambridge University Press; 1988.
-
- Baader A. The posture of the abdomen during locust flight: regulation by steering and ventilatory interneurones. J Exp Biol. 1990;151(1):109–131. doi: 10.1242/jeb.151.1.109. - DOI
-
- Baranowski L. Equations of motion of a spin-stabilized projectile for flight stability testing. J Theor Appl Mech. 2013;51(1):235–246.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
