

Accuracy and feasibility of a novel fine hand motor skill assessment using computer vision object tracking
- PMID: 36725905
- PMCID: PMC9892571
- DOI: 10.1038/s41598-023-29091-0
Accuracy and feasibility of a novel fine hand motor skill assessment using computer vision object tracking
Abstract
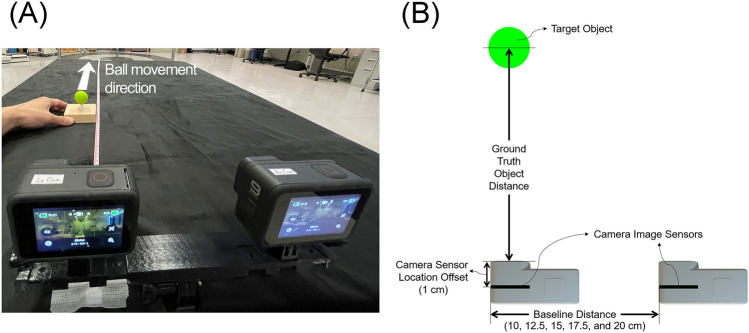
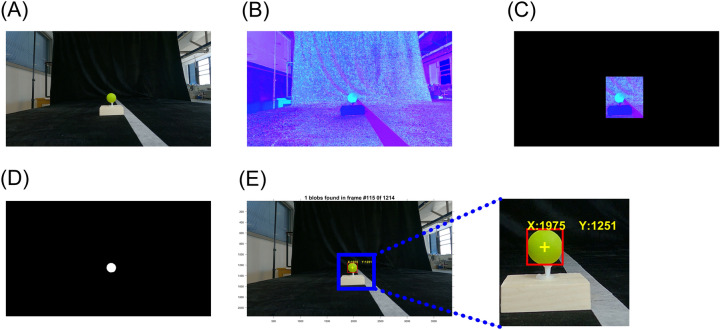
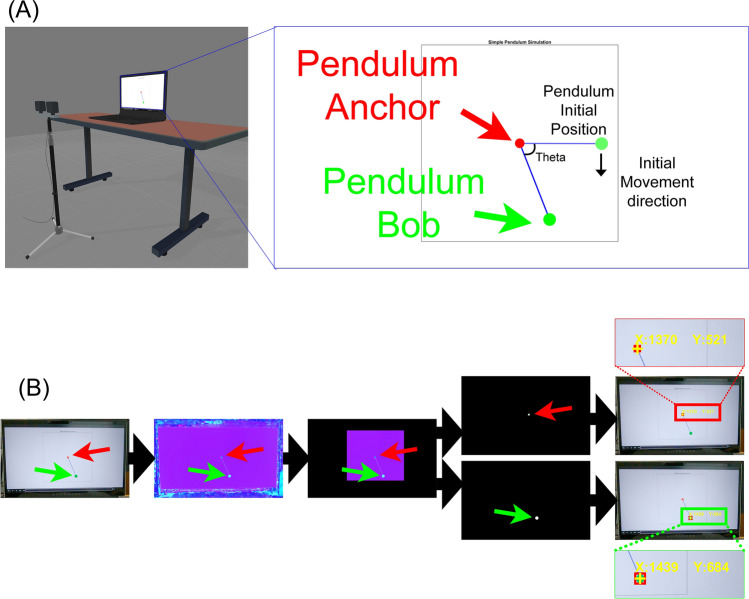
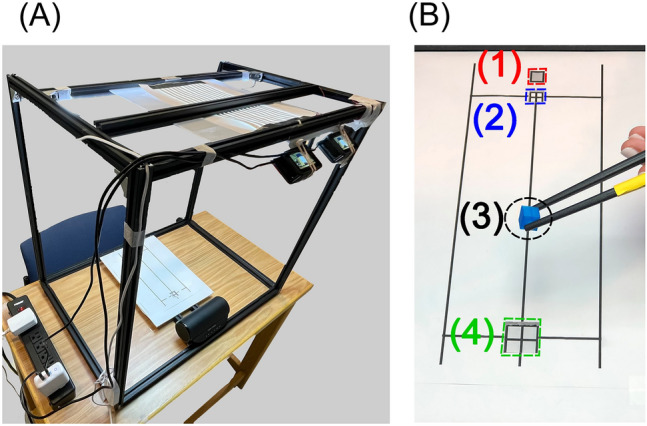
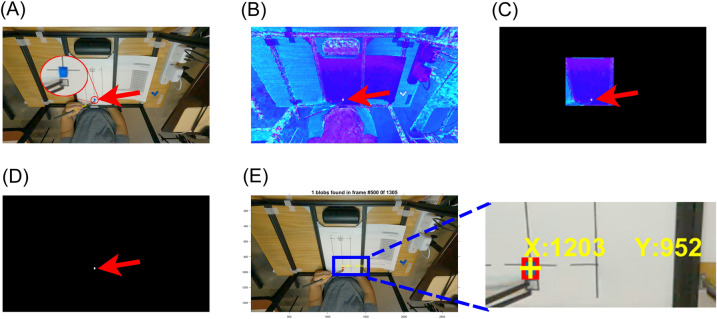
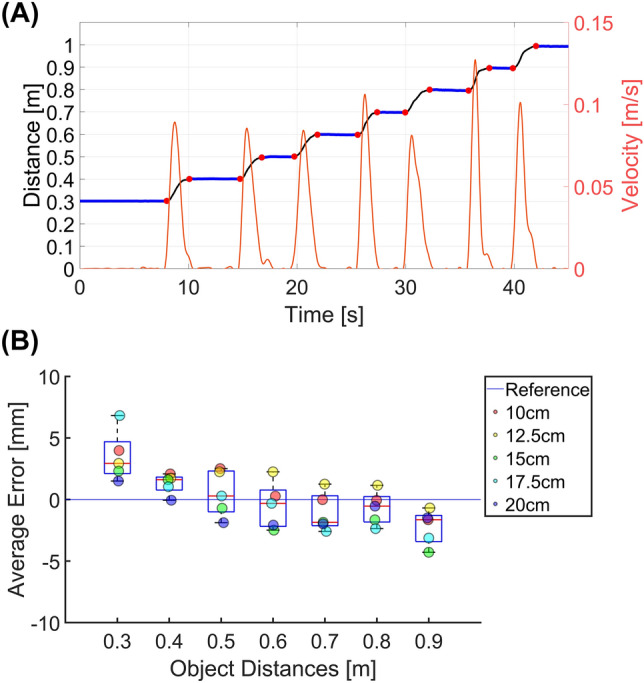
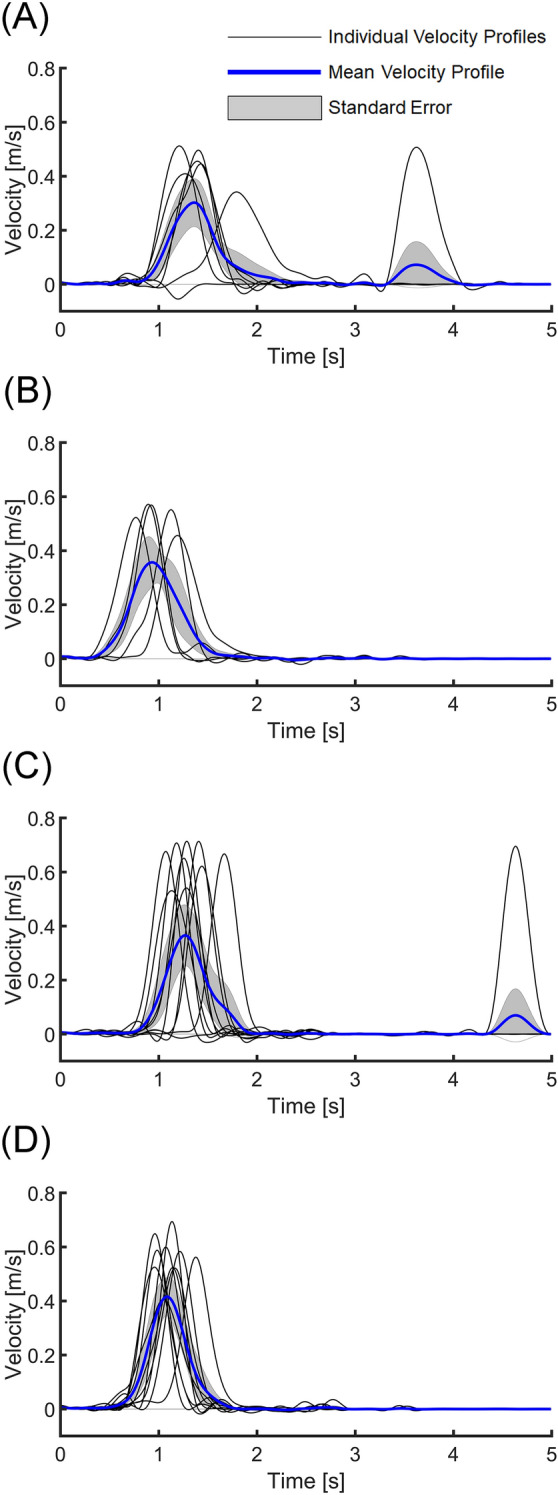
We developed a computer vision-based three-dimension (3D) motion capture system employing two action cameras to examine fine hand motor skill by tracking an object manipulated by a hand. This study aimed to examine the accuracy and feasibility of this approach for detecting changes in a fine hand motor skill. We conducted three distinct experiments to assess the system's accuracy and feasibility. We employed two high-resolution, high-frame-rate action cameras. We evaluated the accuracy of our system in calculating the 3D locations of moving object in various directions. We also examined the system's feasibility in identifying improvement in fine hand motor skill after practice in eleven non-disabled young adults. We utilized color-based object detection and tracking to estimate the object's 3D location, and then we computed the object's kinematics, representing the endpoint goal-directed arm reaching movement. Compared to ground truth measurements, the findings demonstrated that our system can adequately estimate the 3D locations of a moving object. We also showed that the system can be used to measure the endpoint kinematics of goal-directed arm reaching movements to detect changes in fine hand motor skill after practice. Future research is needed to confirm the system's reliability and validity in assessing fine hand motor skills in patient populations.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures

Similar articles
-
A hand motion capture method based on infrared thermography for measuring fine motor skills in biomedicine.Artif Intell Med. 2023 Jan;135:102474. doi: 10.1016/j.artmed.2022.102474. Epub 2022 Dec 16. Artif Intell Med. 2023. PMID: 36628786
-
Spatiotemporal Distribution of Location and Object Effects in Primary Motor Cortex Neurons during Reach-to-Grasp.J Neurosci. 2016 Oct 12;36(41):10640-10653. doi: 10.1523/JNEUROSCI.1716-16.2016. J Neurosci. 2016. PMID: 27733614 Free PMC article.
-
Manual asymmetries in grasp pre-shaping and transport-grasp coordination.Exp Brain Res. 2008 Jun;188(2):305-15. doi: 10.1007/s00221-008-1364-2. Epub 2008 Apr 25. Exp Brain Res. 2008. PMID: 18437369
-
Parieto-frontal coding of reaching: an integrated framework.Exp Brain Res. 1999 Dec;129(3):325-46. doi: 10.1007/s002210050902. Exp Brain Res. 1999. PMID: 10591906 Review.
-
Technology-based methods for the assessment of fine and gross motor skill in children: A systematic overview of available solutions and future steps for effective in-field use.J Sports Sci. 2021 Jun;39(11):1236-1276. doi: 10.1080/02640414.2020.1864984. Epub 2021 Feb 15. J Sports Sci. 2021. PMID: 33588689
Cited by
-
Radiation-free 3D assessment of back height differences via three-dimensional depth sensing in adolescent idiopathic scoliosis: prospective, single-center, observational study.Eur Spine J. 2025 Jul 21. doi: 10.1007/s00586-025-09154-8. Online ahead of print. Eur Spine J. 2025. PMID: 40689983
-
Research trends and hotspots of post-stroke upper limb dysfunction: a bibliometric and visualization analysis.Front Neurol. 2024 Oct 2;15:1449729. doi: 10.3389/fneur.2024.1449729. eCollection 2024. Front Neurol. 2024. PMID: 39416663 Free PMC article.
-
Computer vision for kinematic metrics of the drinking task in a pilot study of neurotypical participants.Sci Rep. 2024 Sep 5;14(1):20668. doi: 10.1038/s41598-024-71470-8. Sci Rep. 2024. PMID: 39237646 Free PMC article.
-
Autonomous object tracking with vision based control using a 2DOF robotic arm.Sci Rep. 2025 Apr 18;15(1):13404. doi: 10.1038/s41598-025-97930-3. Sci Rep. 2025. PMID: 40251241 Free PMC article.
References
-
- Rammer, J. R. Markerless analysis of upper extremity kinematics during standardized pediatric assessment. In ProQuest Dissertations and Theses 227 (2014).
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
