

Steering particles via micro-actuation of chemical gradients using model predictive control
- PMID: 36742353
- PMCID: PMC9894658
- DOI: 10.1063/5.0126690
Steering particles via micro-actuation of chemical gradients using model predictive control
Abstract
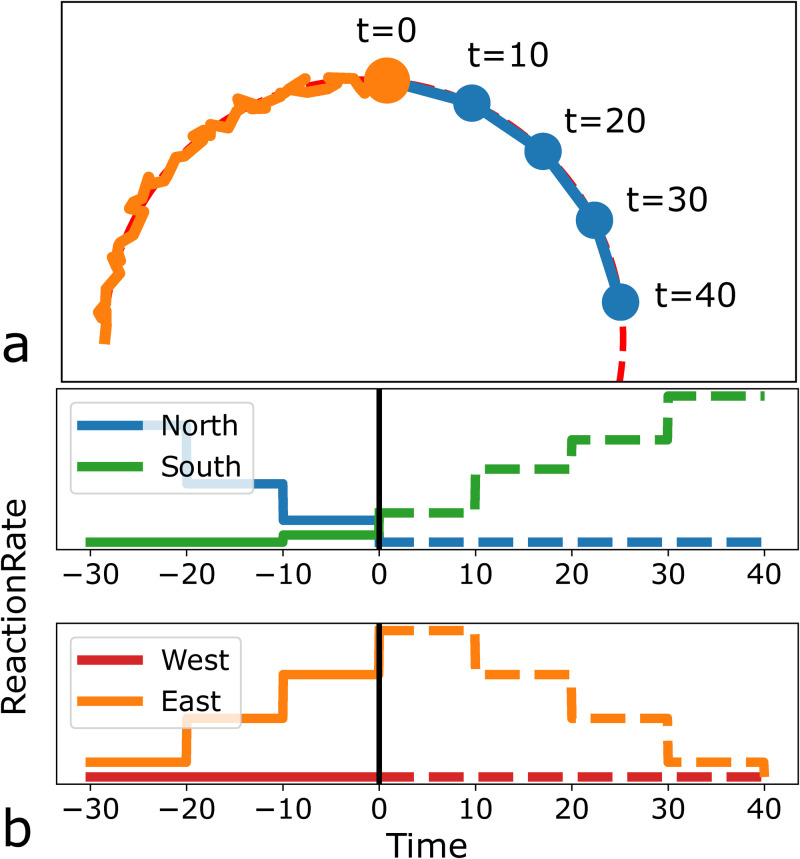
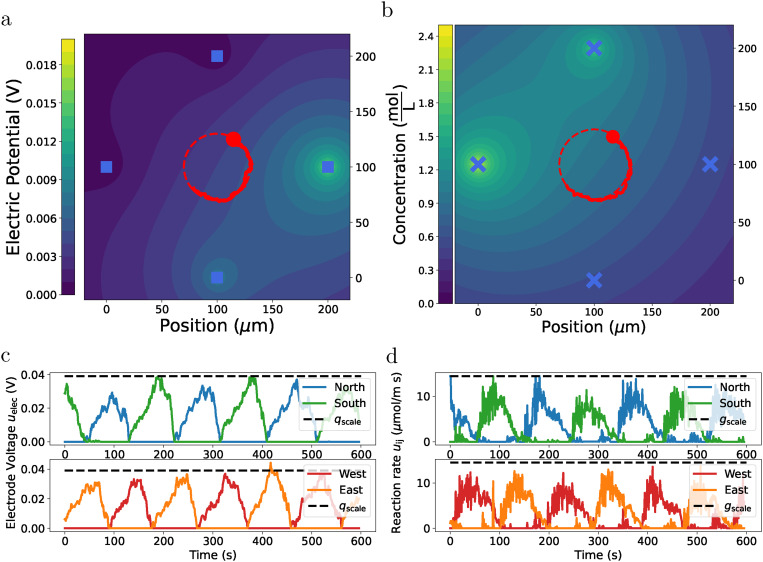
Biological systems rely on chemical gradients to direct motion through both chemotaxis and signaling, but synthetic approaches for doing the same are still relatively naïve. Consequently, we present a novel method for using chemical gradients to manipulate the position and velocity of colloidal particles in a microfluidic device. Specifically, we show that a set of spatially localized chemical reactions that are sufficiently controllable can be used to steer colloidal particles via diffusiophoresis along an arbitrary trajectory. To accomplish this, we develop a control method for steering colloidal particles with chemical gradients using nonlinear model predictive control with a model based on the unsteady Green's function solution of the diffusion equation. We illustrate the effectiveness of our approach using Brownian dynamics simulations that steer single particles along paths, such as circle, square, and figure-eight. We subsequently compare our results with published techniques for steering colloids using electric fields, and we provide an analysis of the physical parameter space where our approach is useful. Based on these findings, we conclude that it is theoretically possible to explicitly steer particles via chemical gradients in a microfluidics paradigm.
© 2023 Author(s).
Figures








References
LinkOut - more resources
Full Text Sources