

Scope actuation system for articulated laparoscopes
- PMID: 36750488
- PMCID: PMC10017632
- DOI: 10.1007/s00464-023-09904-z
Scope actuation system for articulated laparoscopes
Abstract
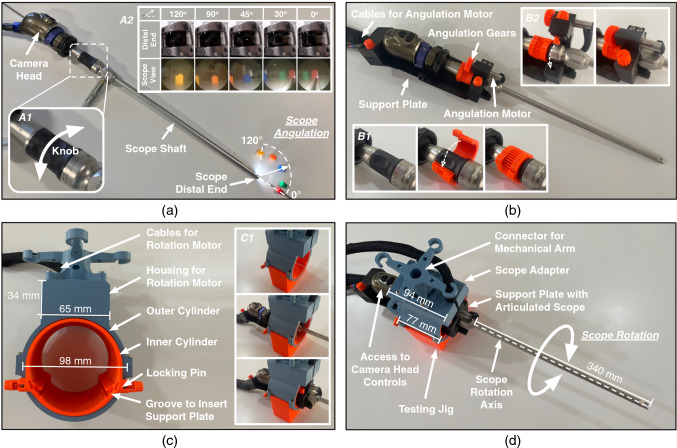
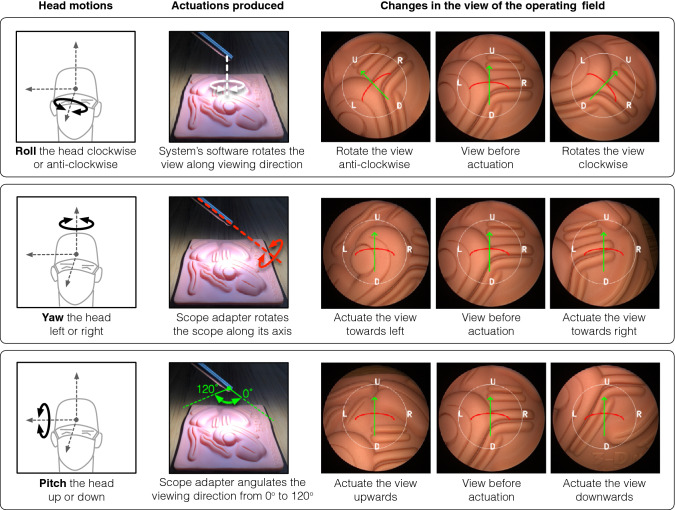
Background: An articulated laparoscope comprises a rigid shaft with an articulated distal end to change the viewing direction. The articulation provides improved navigation of the operating field in confined spaces. Furthermore, incorporation of an actuation system tends to enhance the control of an articulated laparoscope.
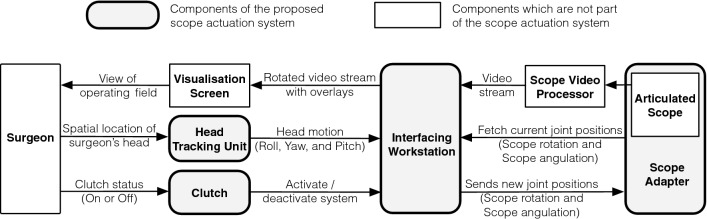
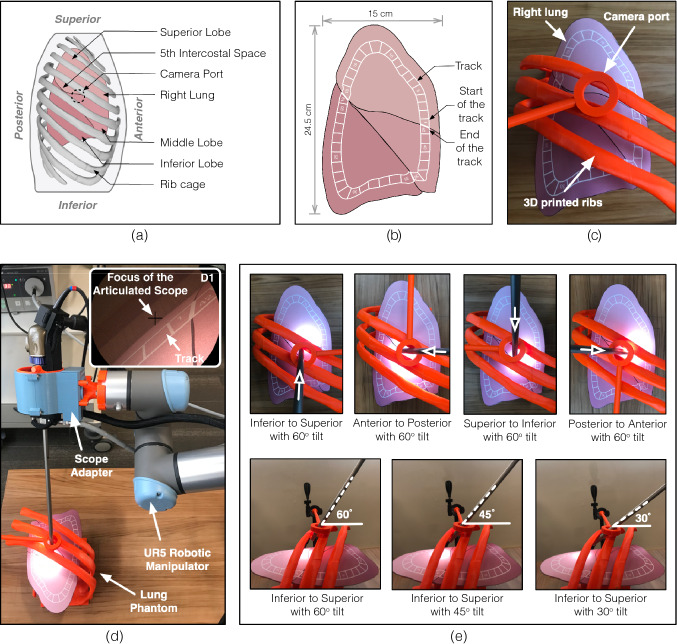
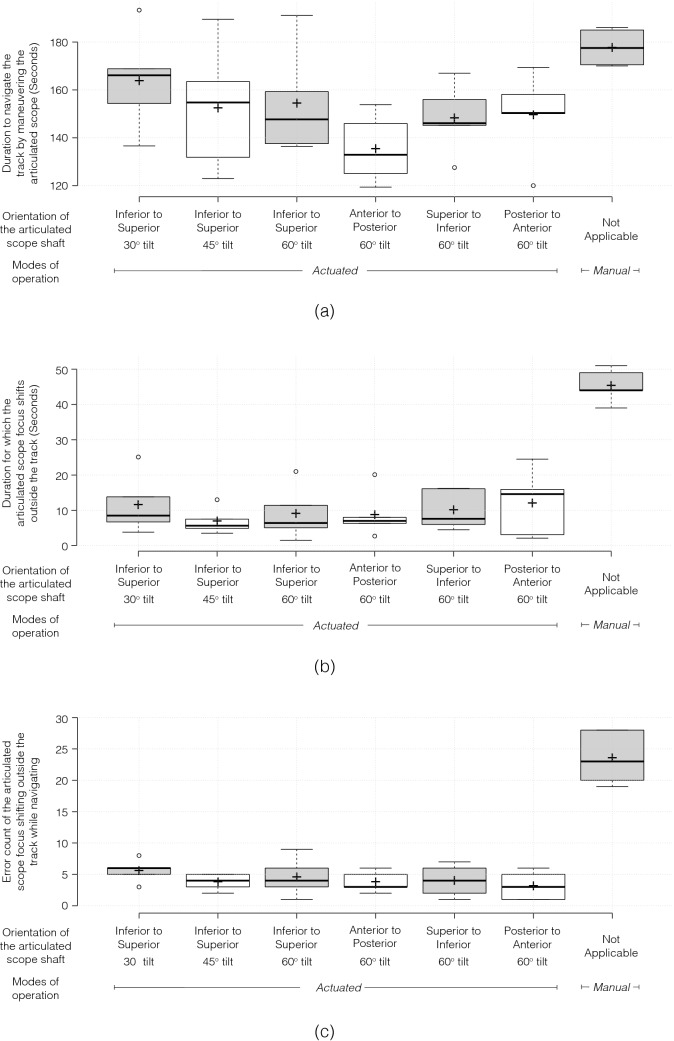
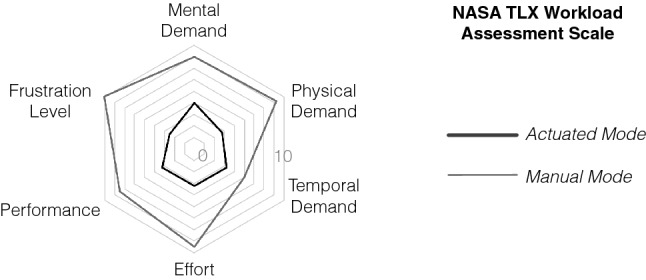
Methods: A preliminary prototype of a scope actuation system to maneuver an off-the-shelf articulated laparoscope (EndoCAMaleon by Karl Storz, Germany) was developed. A user study was conducted to evaluate this prototype for the surgical paradigm of video-assisted thoracic surgery. In the study, the subjects maneuvered an articulated scope under two modes of operation: (a) actuated mode where an operating surgeon maneuvers the scope using the developed prototype and (b) manual mode where a surgical assistant directly maneuvers the scope. The actuated mode was further assessed for multiple configurations based on the orientation of the articulated scope at the incision.
Results: The data show the actuated mode scored better than the manual mode on all the measured performance parameters including (a) total duration to visualize a marked region, (a) duration for which scope focus shifts outside a predefined visualization region, and (c) number of times for which scope focus shifts outside a predefined visualization region. Among the different configurations tested using the actuated mode, no significant difference was observed.
Conclusions: The proposed articulated scope actuation system facilitates better navigation of an operative field as compared to a human assistant. Secondly, irrespective of the orientation in which an articulated scope's shaft is inserted through an incision, the proposed actuation system can navigate and visualize the operative field.
Keywords: Articulated scopes; Laparoscopic surgery; Robotic scope assistant system; Scope holders; Surgical robots.
© 2023. The Author(s).
Conflict of interest statement
The authors of this submission, Mr. Nihal Abdurahiman, Mr. Mohammad Khorasani, Mr. Jhasketan Padhan, Mr. Victor M. Baez, Dr. Abdulla Al-Ansari, Dr. Panagiotis Tsiamyrtzis, Dr. Aaron T. Becker, and Dr. Nikhil V. Navkar have no conflict of interest or financial ties to disclose.
Figures
References
-
- How to use the ENDOEYE FLEX Deflectable Videoscope (2022) https://www.olympusprofed.com/gs/lapcolorectal/9159/. Accessed 18 Sept 2022
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
