

Magnon scattering modulated by omnidirectional hopfion motion in antiferromagnets for meta-learning
- PMID: 36753538
- PMCID: PMC9908019
- DOI: 10.1126/sciadv.ade7439
Magnon scattering modulated by omnidirectional hopfion motion in antiferromagnets for meta-learning
Abstract
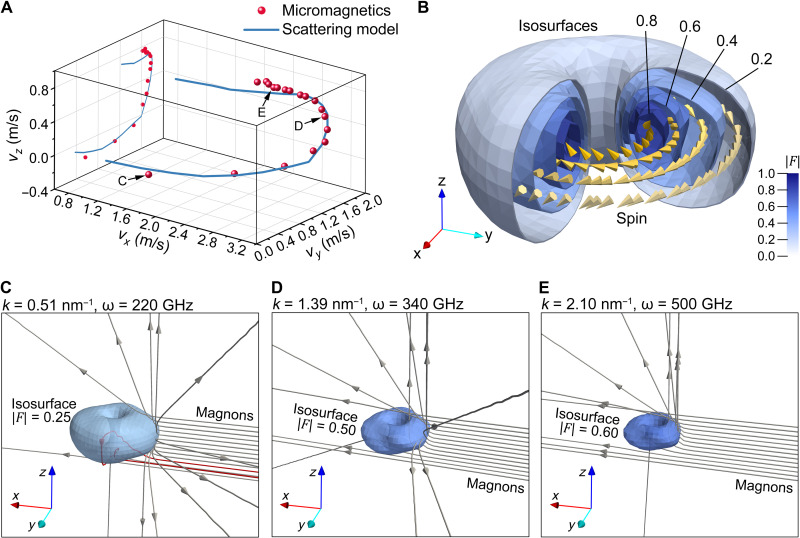
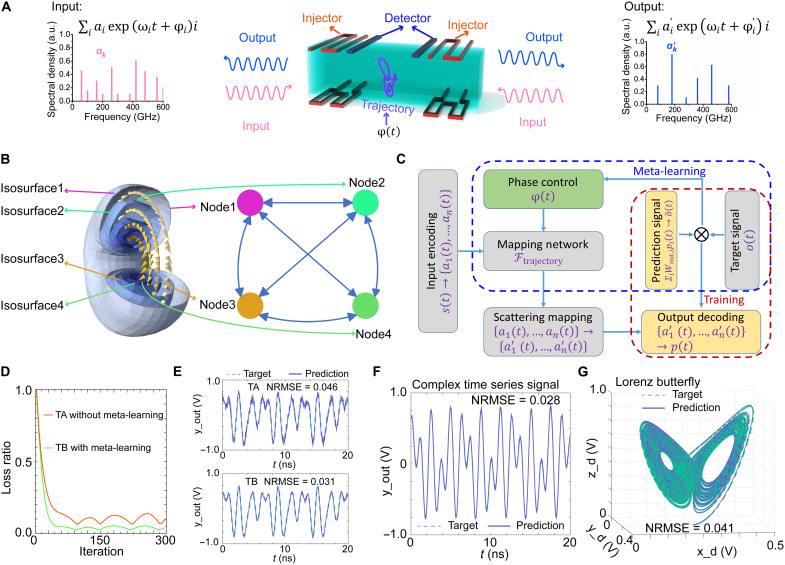
Neuromorphic computing is expected to achieve human-brain performance by reproducing the structure of biological neural systems. However, previous neuromorphic designs based on synapse devices are all unsatisfying for their hardwired network structure and limited connection density, far from their biological counterpart, which has high connection density and the ability of meta-learning. Here, we propose a neural network based on magnon scattering modulated by an omnidirectional mobile hopfion in antiferromagnets. The states of neurons are encoded in the frequency distribution of magnons, and the connections between them are related to the frequency dependence of magnon scattering. Last, by controlling the hopfion's state, we can modulate hyperparameters in our network and realize the first meta-learning device that is verified to be well functioning. It not only breaks the connection density bottleneck but also provides a guideline for future designs of neuromorphic devices.
Figures
References
-
- R. Friedberg, T. D. Lee, A. Sirlin, Gauge-field non-topological solitons in three space-dimensions (II). Nucl. Phys. B. 115, 32–47 (1976).
-
- M. Rho, A. S. Goldhaber, G. E. Brown, Topological soliton bag model for baryons. Phys. Rev. Lett. 51, 747–750 (1983).
-
- G. Finocchio, F. Büttner, R. Tomasello, M. Carpentieri, M. Kläui, Magnetic skyrmions: From fundamental to applications. J. Phys. D Appl. Phys. 49, 423001 (2016).
-
- A. Fert, V. Cros, J. Sampaio, Skyrmions on the track. Nat. Nanotechnol. 8, 152–156 (2013). - PubMed
-
- S. M. Mohseni, S. R. Sani, J. Persson, T. N. A. Nguyen, S. Chung, Y. E. Pogoryelov, P. K. Muduli, E. Iacocca, A. Eklund, R. K. Dumas, S. Bonetti, A. Deac, M. A. Hoefer, J. Åkerman, Spin torque–generated magnetic droplet solitons. Science. 339, 1295–1298 (2013). - PubMed
LinkOut - more resources
Full Text Sources
