

Global inhibition in head-direction neural circuits: a systematic comparison between connectome-based spiking neural circuit models
- PMID: 36781446
- PMCID: PMC10353971
- DOI: 10.1007/s00359-023-01615-z
Global inhibition in head-direction neural circuits: a systematic comparison between connectome-based spiking neural circuit models
Abstract
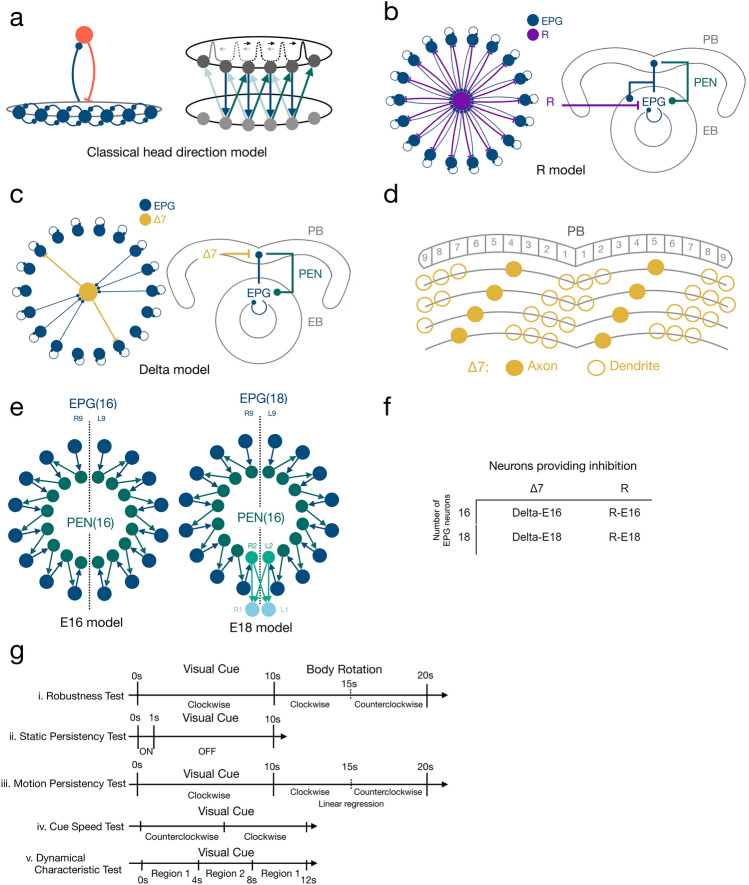
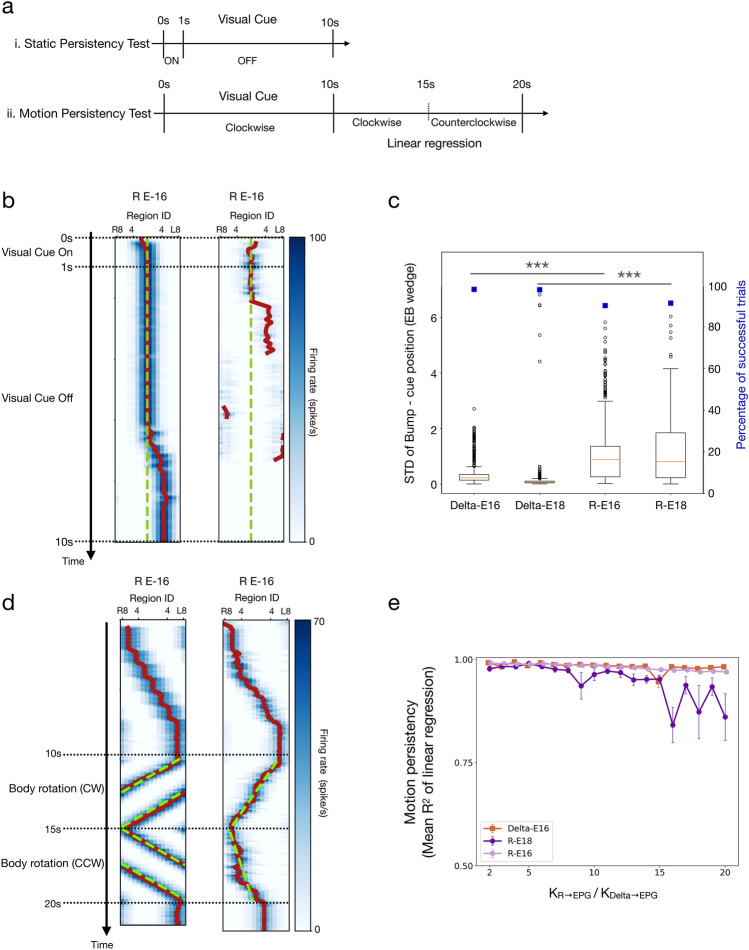
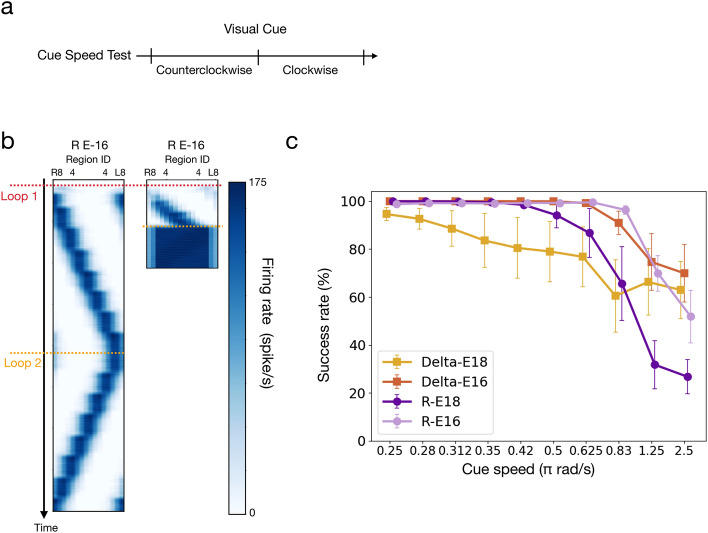
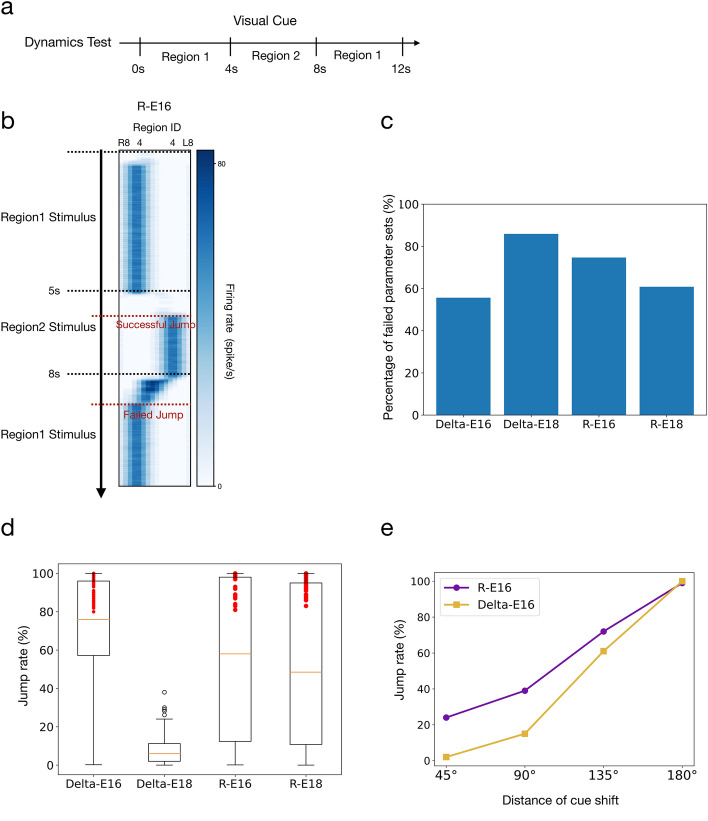
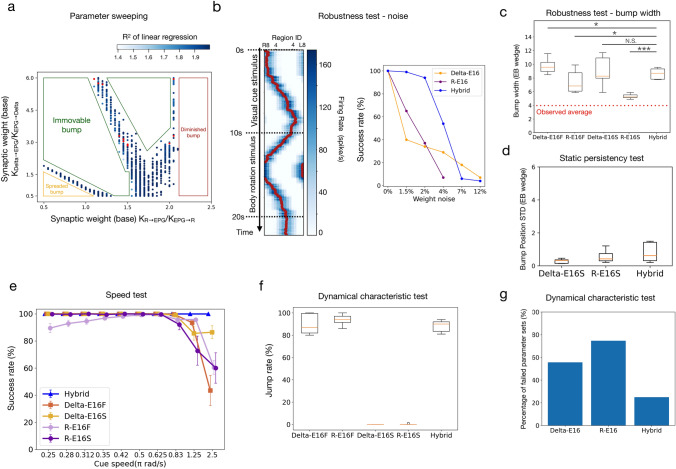
The recent discovery of the head-direction (HD) system in fruit flies has provided unprecedented insights into the neural mechanisms of spatial orientation. Despite the progress, the neural substance of global inhibition, an essential component of the HD circuits, remains controversial. Some studies suggested that the ring neurons provide global inhibition, while others suggested the Δ7 neurons. In the present study, we provide evaluations from the theoretical perspective by performing systematic analyses on the computational models based on the ring-neuron (R models) and Δ7-neurons (Delta models) hypotheses with modifications according to the latest connectomic data. We conducted four tests: robustness, persistency, speed, and dynamical characteristics. We discovered that the two models led to a comparable performance in general, but each excelled in different tests. The R Models were more robust, while the Delta models were better in the persistency test. We also tested a hybrid model that combines both inhibitory mechanisms. While the performances of the R and Delta models in each test are highly parameter-dependent, the Hybrid model performed well in all tests with the same set of parameters. Our results suggest the possibility of combined inhibitory mechanisms in the HD circuits of fruit flies.
Keywords: Attractor dynamics; Central complex; Drosophila; Global inhibition; Head direction.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no conflict of interest.
Figures

References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Molecular Biology Databases
