

Functional duality in group criticality via ambiguous interactions
- PMID: 36791061
- PMCID: PMC9931117
- DOI: 10.1371/journal.pcbi.1010869
Functional duality in group criticality via ambiguous interactions
Abstract
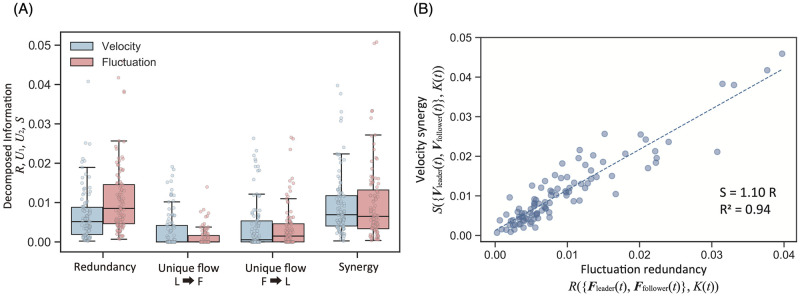
Critical phenomena are wildly observed in living systems. If the system is at criticality, it can quickly transfer information and achieve optimal response to external stimuli. Especially, animal collective behavior has numerous critical properties, which are related to other research regions, such as the brain system. Although the critical phenomena influencing collective behavior have been extensively studied, two important aspects require clarification. First, these critical phenomena never occur on a single scale but are instead nested from the micro- to macro-levels (e.g., from a Lévy walk to scale-free correlation). Second, the functional role of group criticality is unclear. To elucidate these aspects, the ambiguous interaction model is constructed in this study; this model has a common framework and is a natural extension of previous representative models (such as the Boids and Vicsek models). We demonstrate that our model can explain the nested criticality of collective behavior across several scales (considering scale-free correlation, super diffusion, Lévy walks, and 1/f fluctuation for relative velocities). Our model can also explain the relationship between scale-free correlation and group turns. To examine this relation, we propose a new method, applying partial information decomposition (PID) to two scale-free induced subgroups. Using PID, we construct information flows between two scale-free induced subgroups and find that coupling of the group morphology (i.e., the velocity distributions) and its fluctuation power (i.e., the fluctuation distributions) likely enable rapid group turning. Thus, the flock morphology may help its internal fluctuation convert to dynamic behavior. Our result sheds new light on the role of group morphology, which is relatively unheeded, retaining the importance of fluctuation dynamics in group criticality.
Copyright: © 2023 Niizato et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Figures









References
-
- Ballerini M, Cabibbo N, Candelier R, Cavagna A, Cisbani E, Giardina I, et al.. Interaction ruling animal collective behavior depends on topological rather than metric distance: Evidence from a field study. Proceedings of the National Academy of Sciences. 2008;105(4):1232–1237. doi: 10.1073/pnas.0711437105 - DOI - PMC - PubMed
-
- Sumpter D. Collective animal behavior. Princeton University Press; 2010.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
