

Amorphous entangled active matter
- PMID: 36809295
- PMCID: PMC11164134
- DOI: 10.1039/d2sm01573k
Amorphous entangled active matter
Abstract
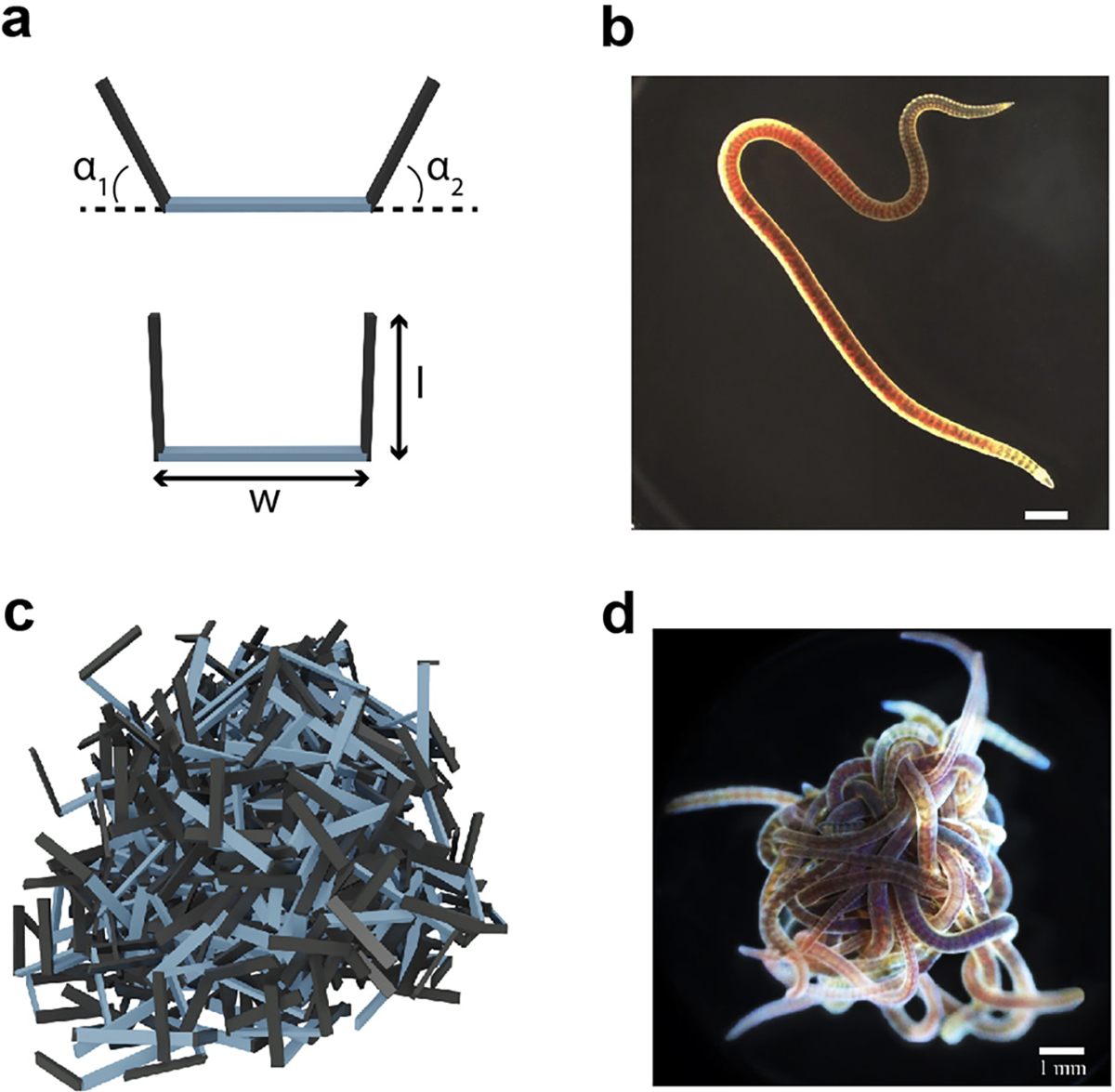
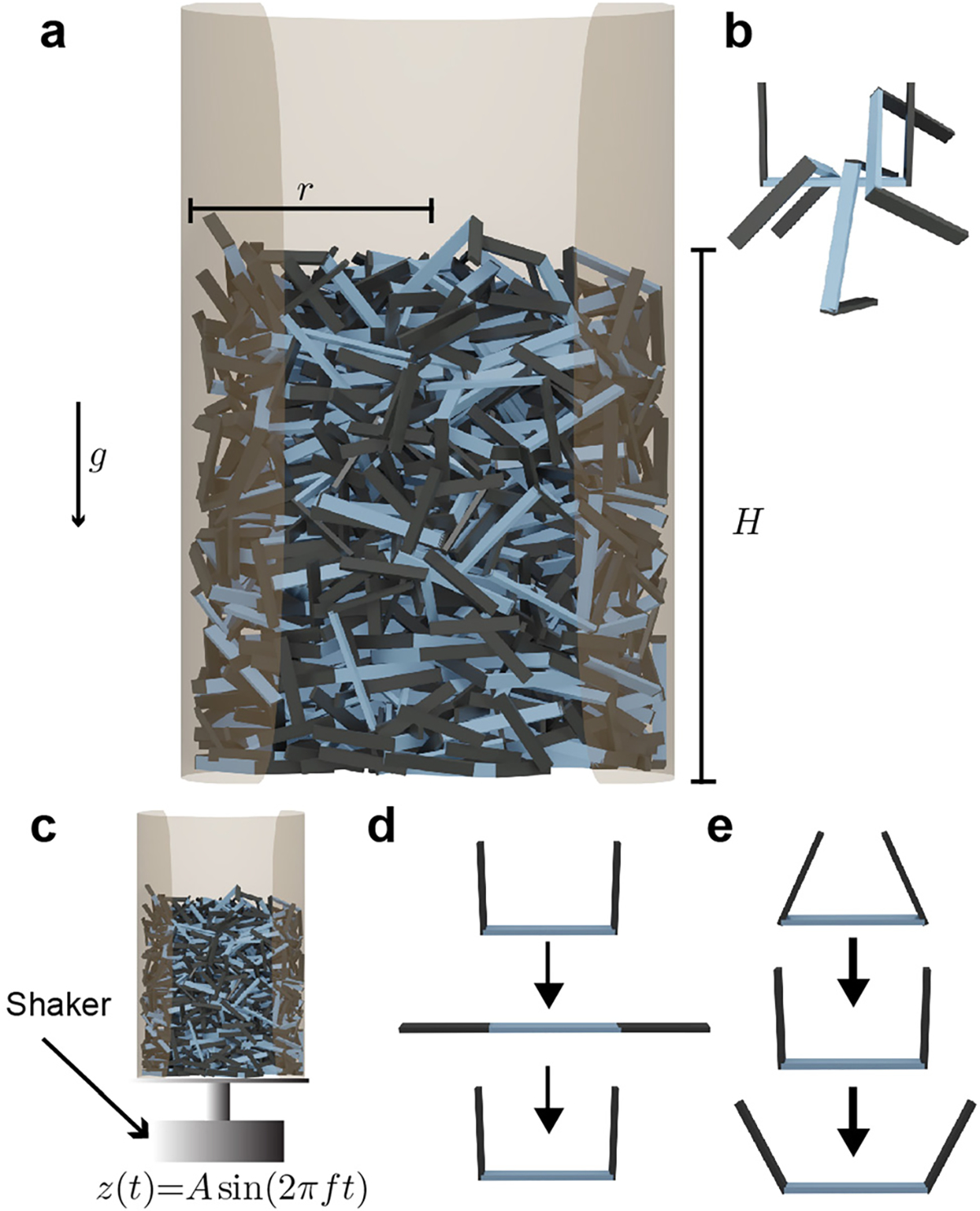
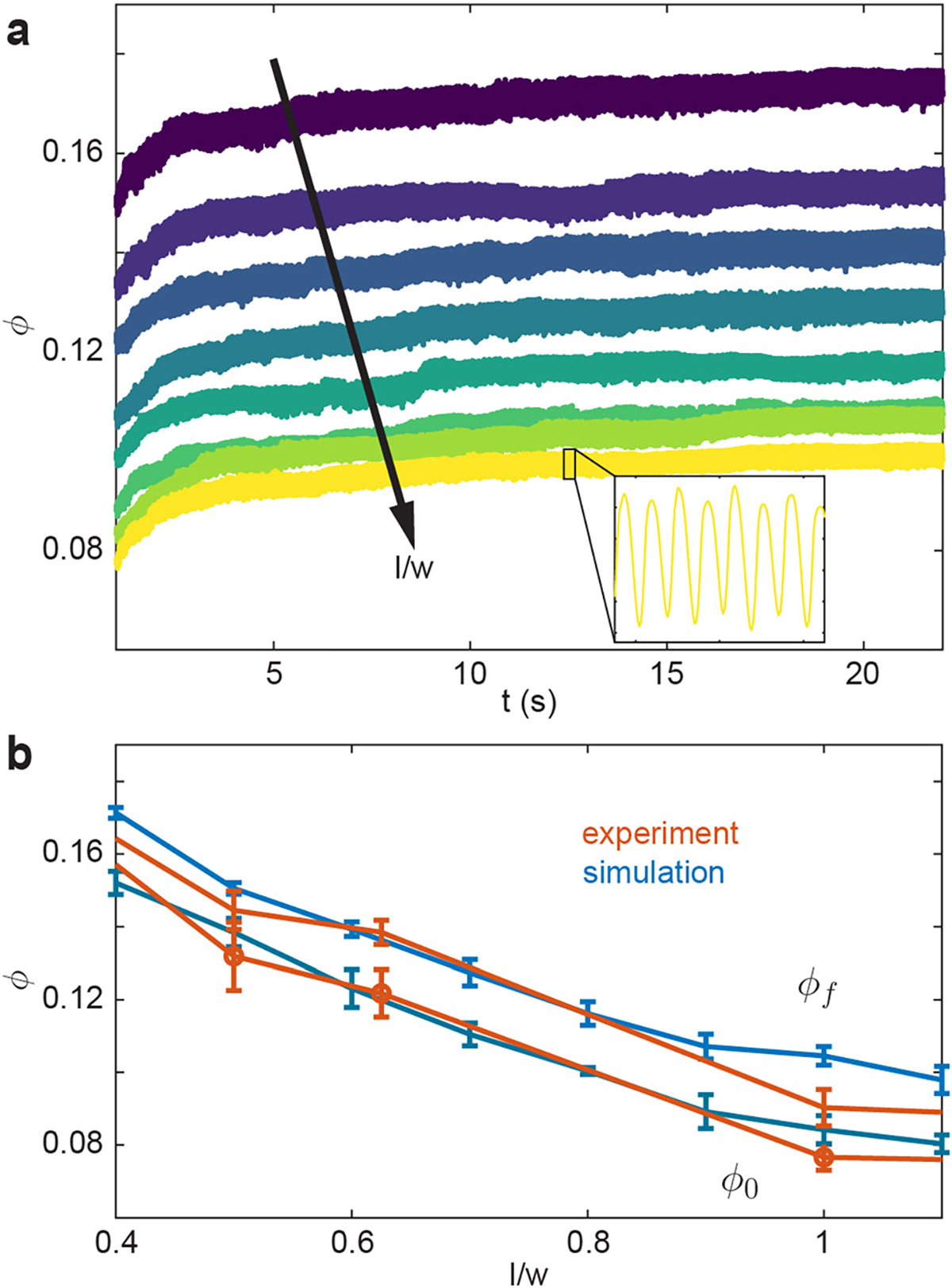
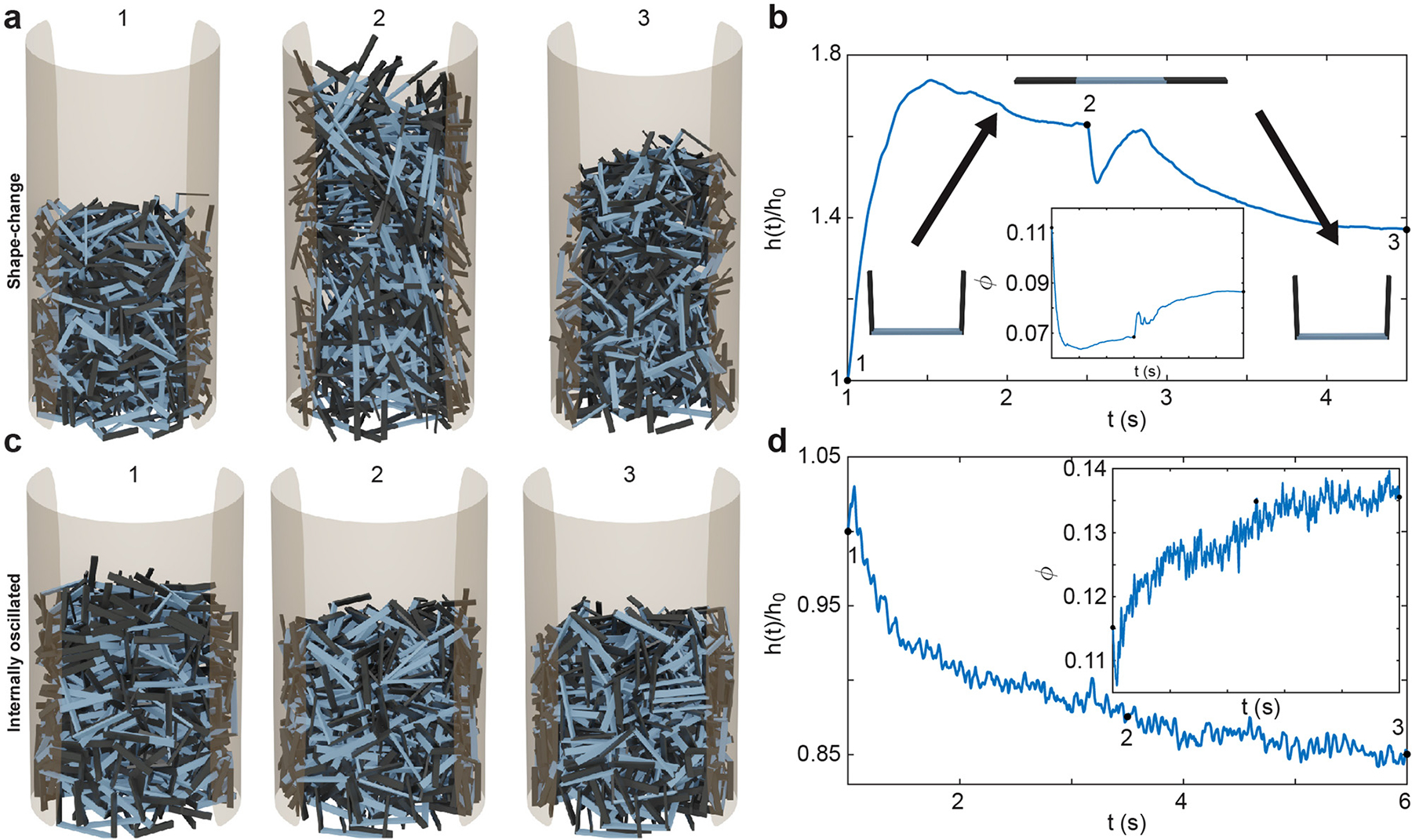
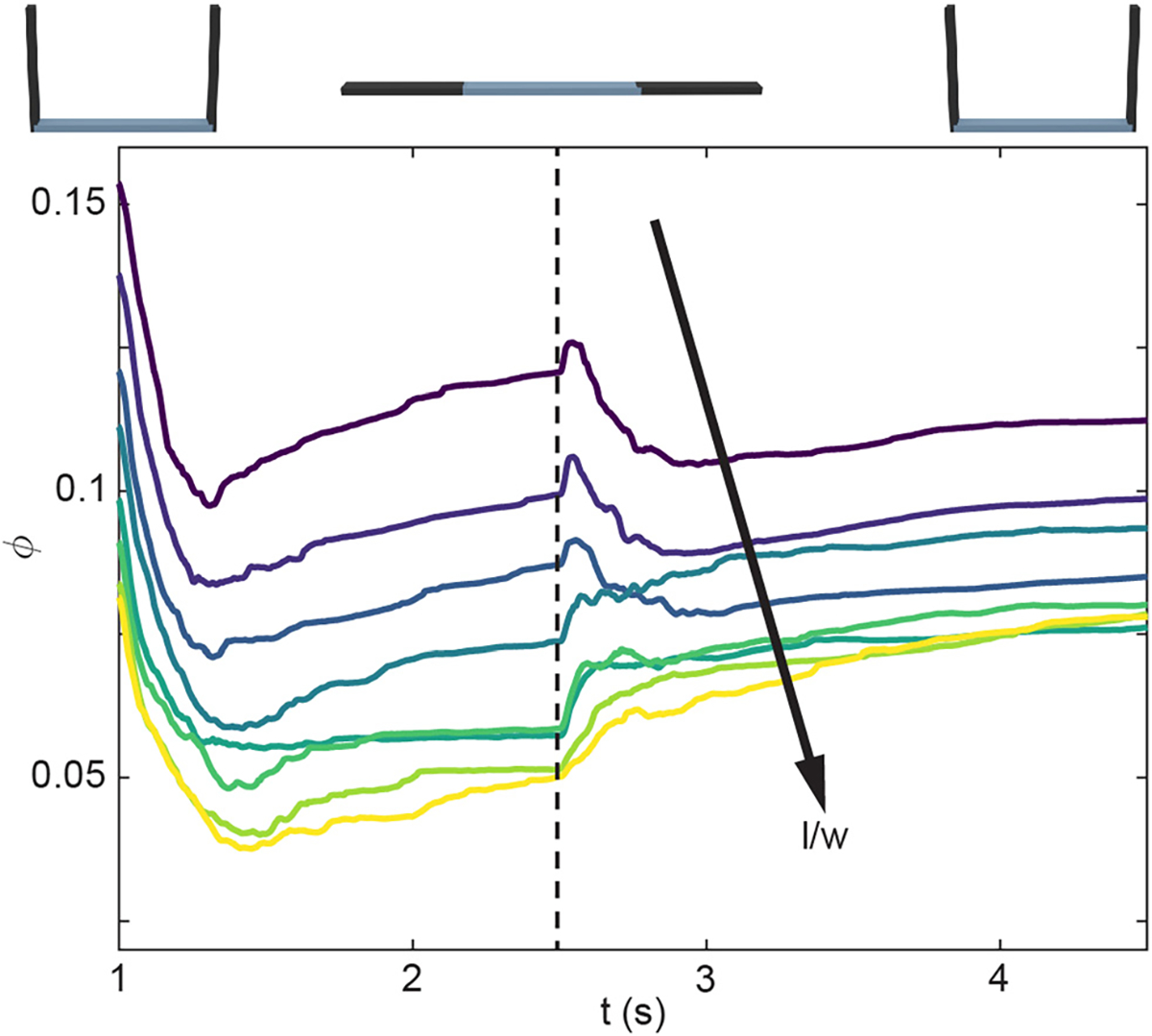
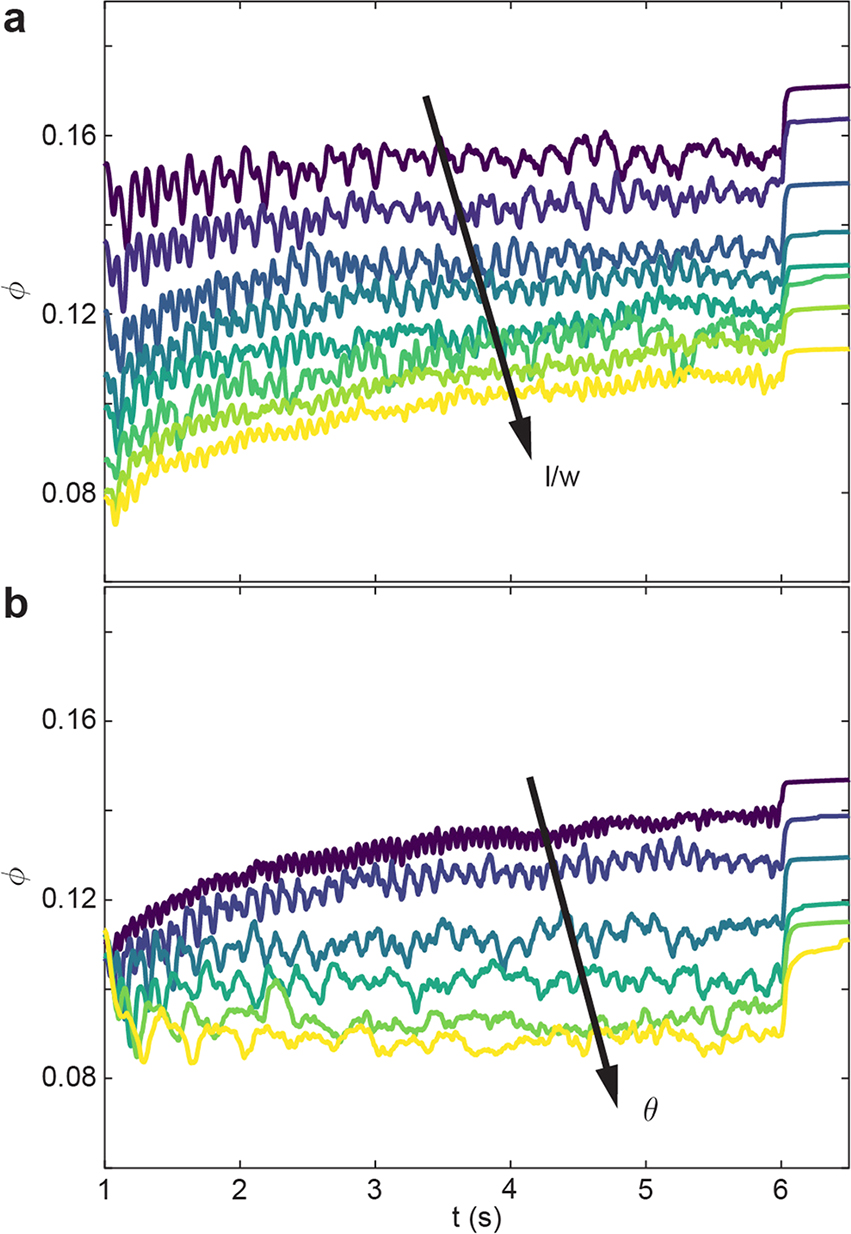
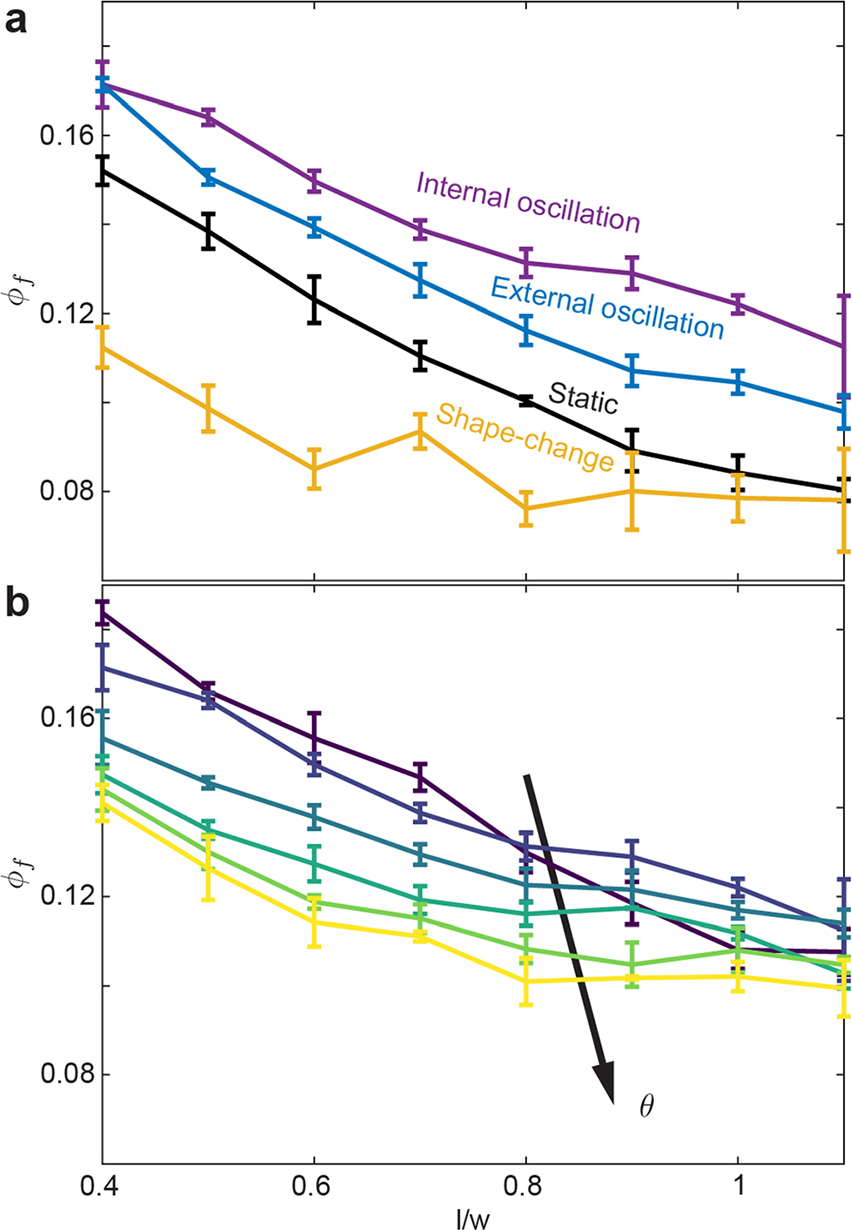
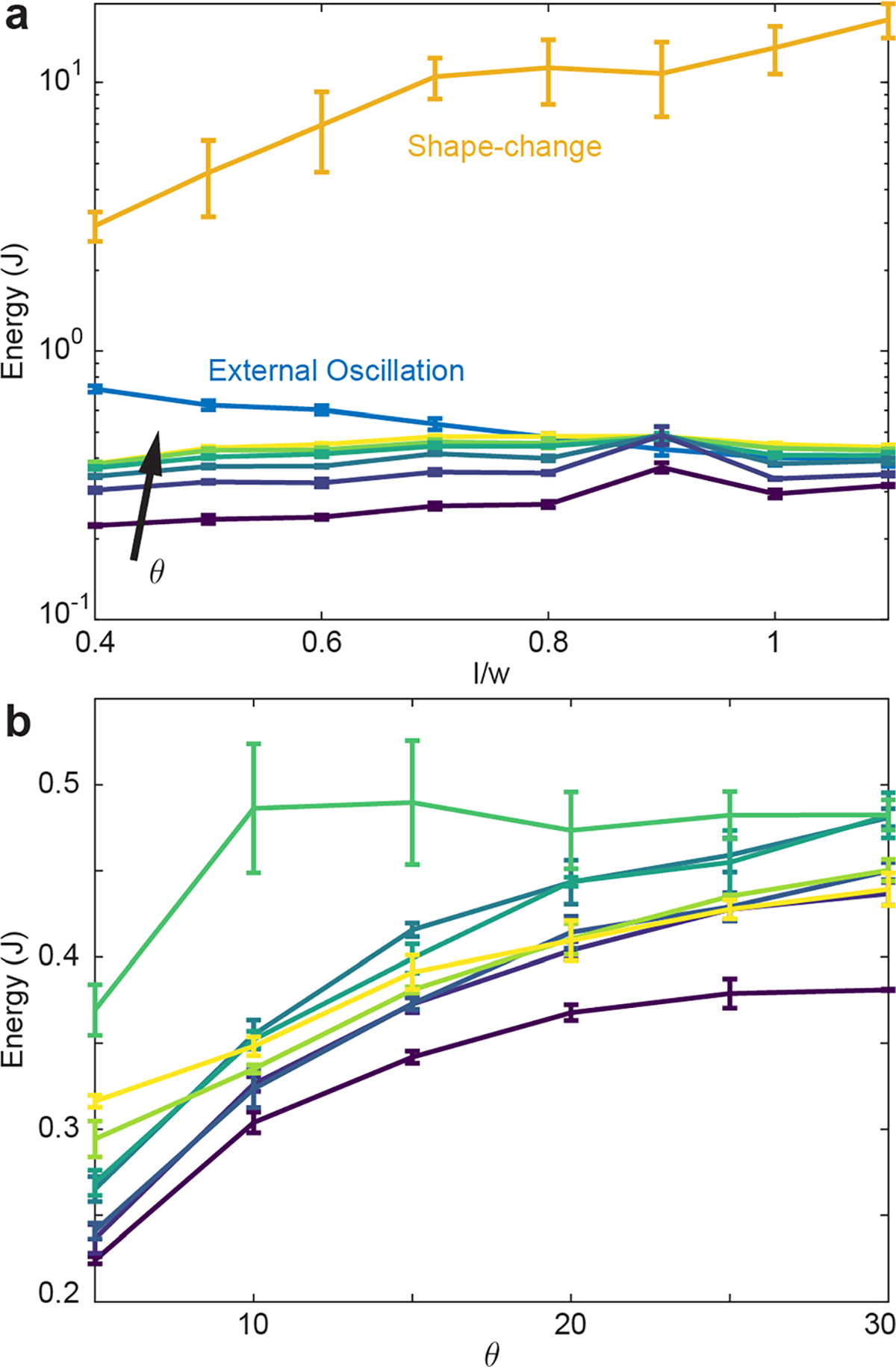
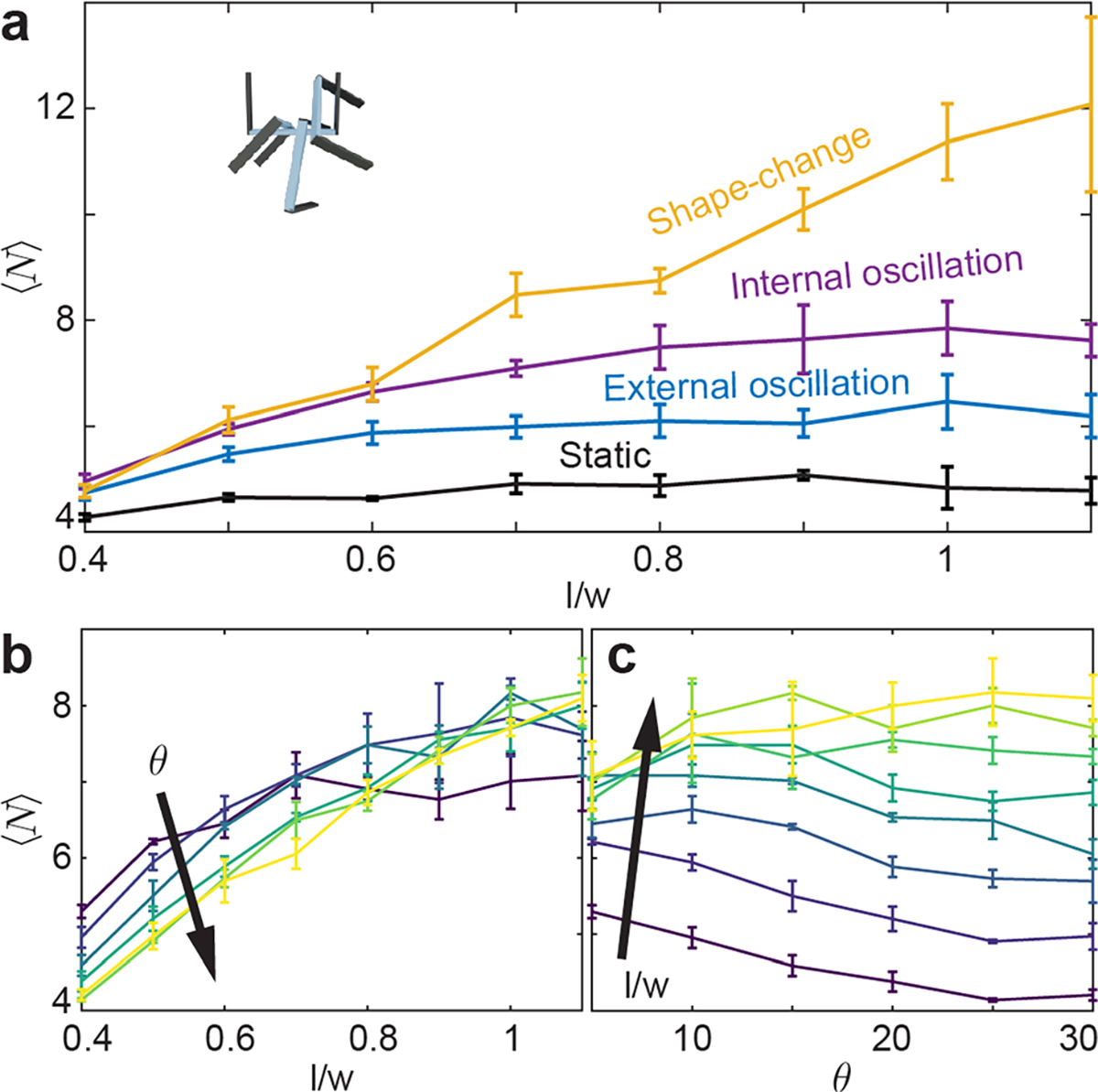
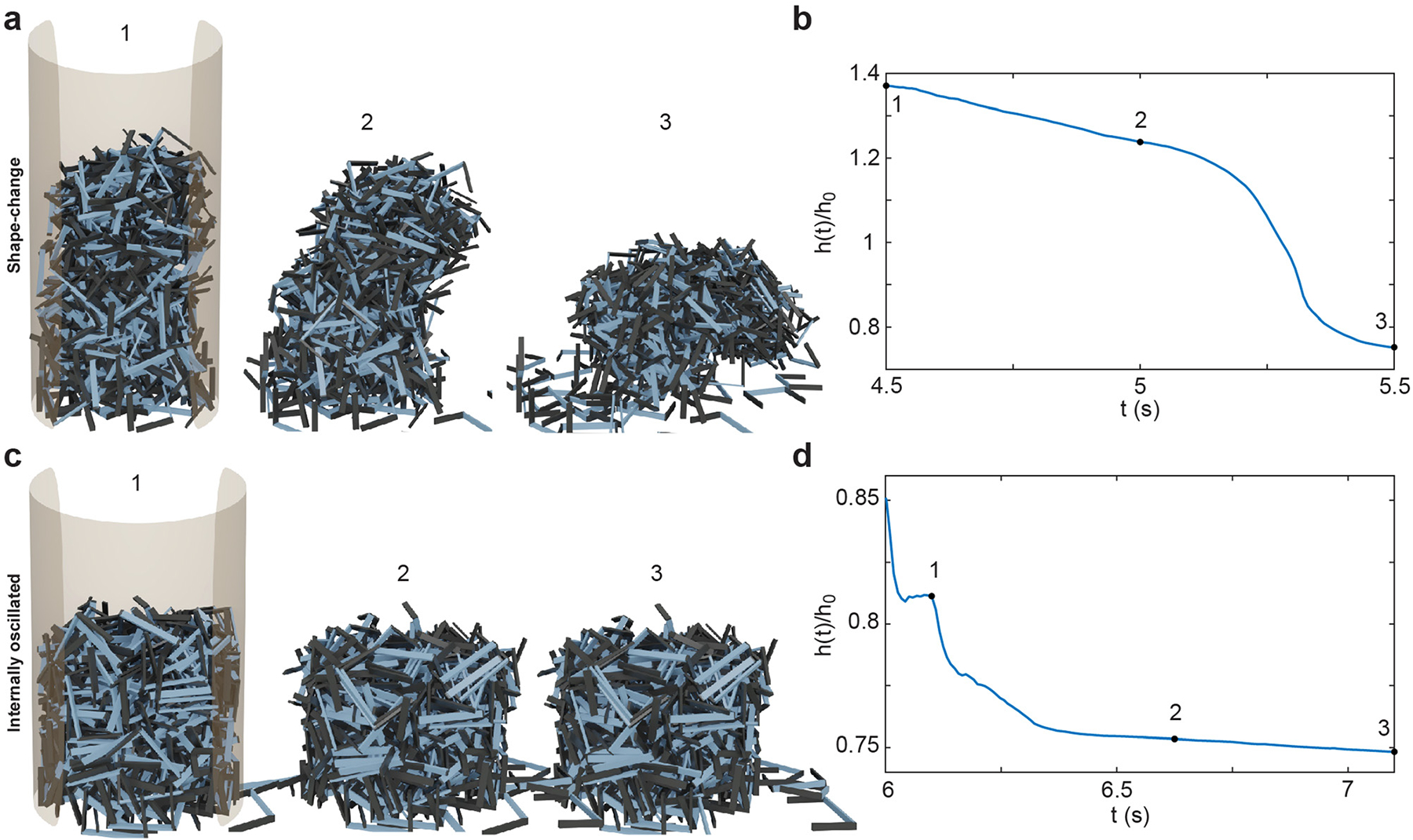
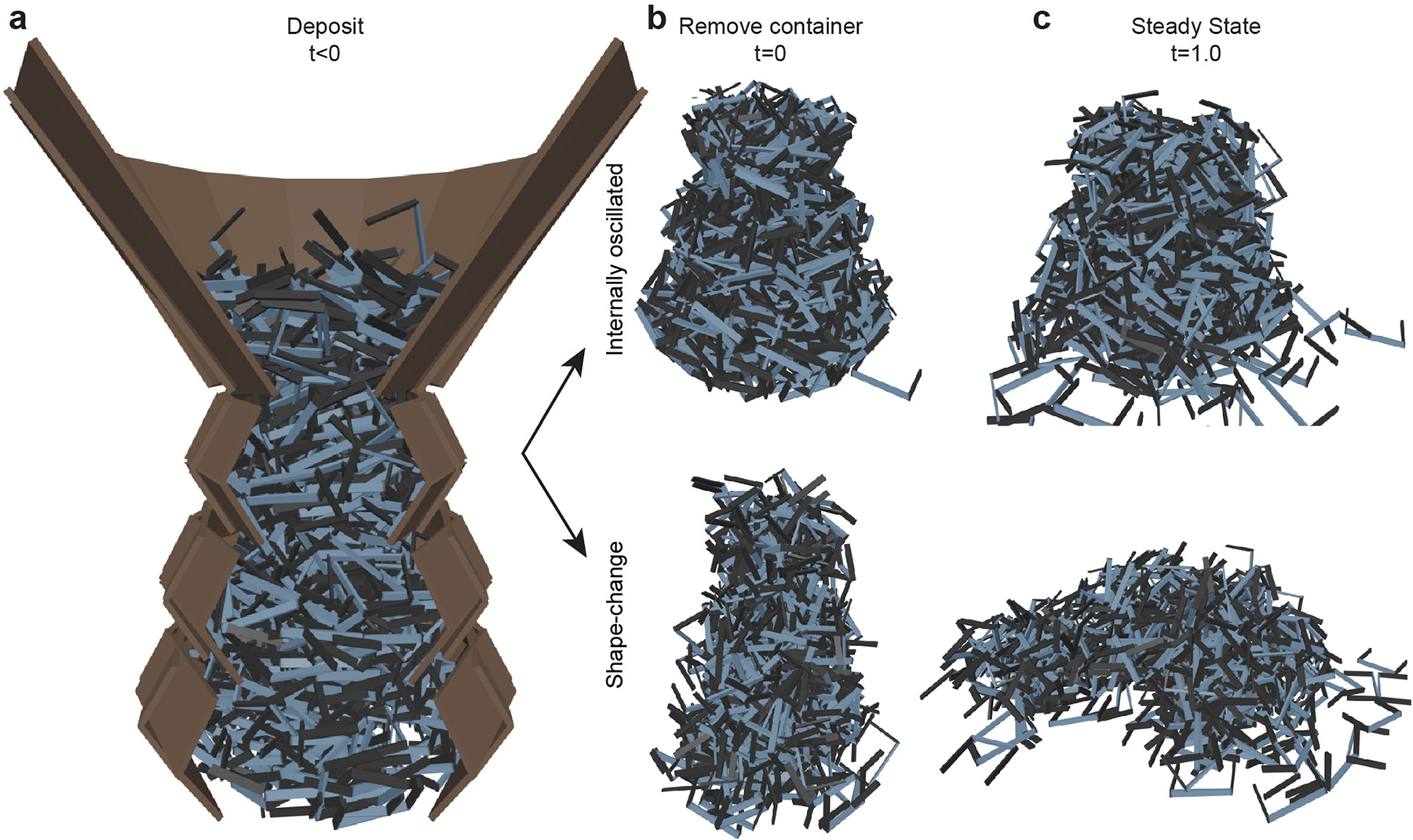
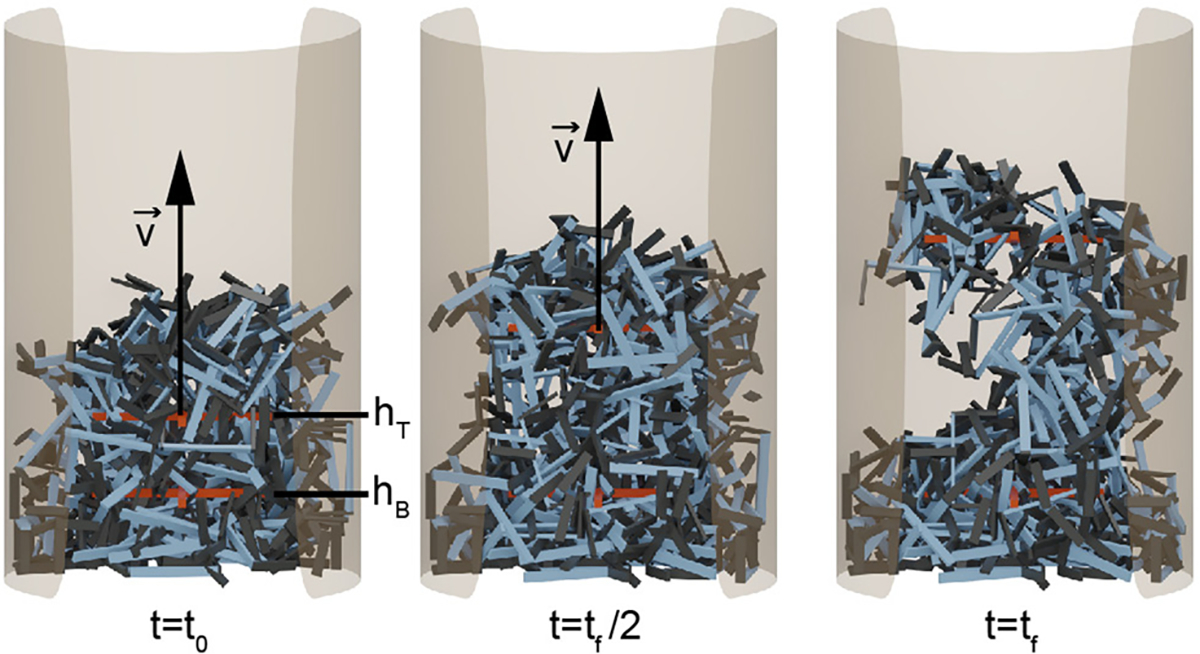
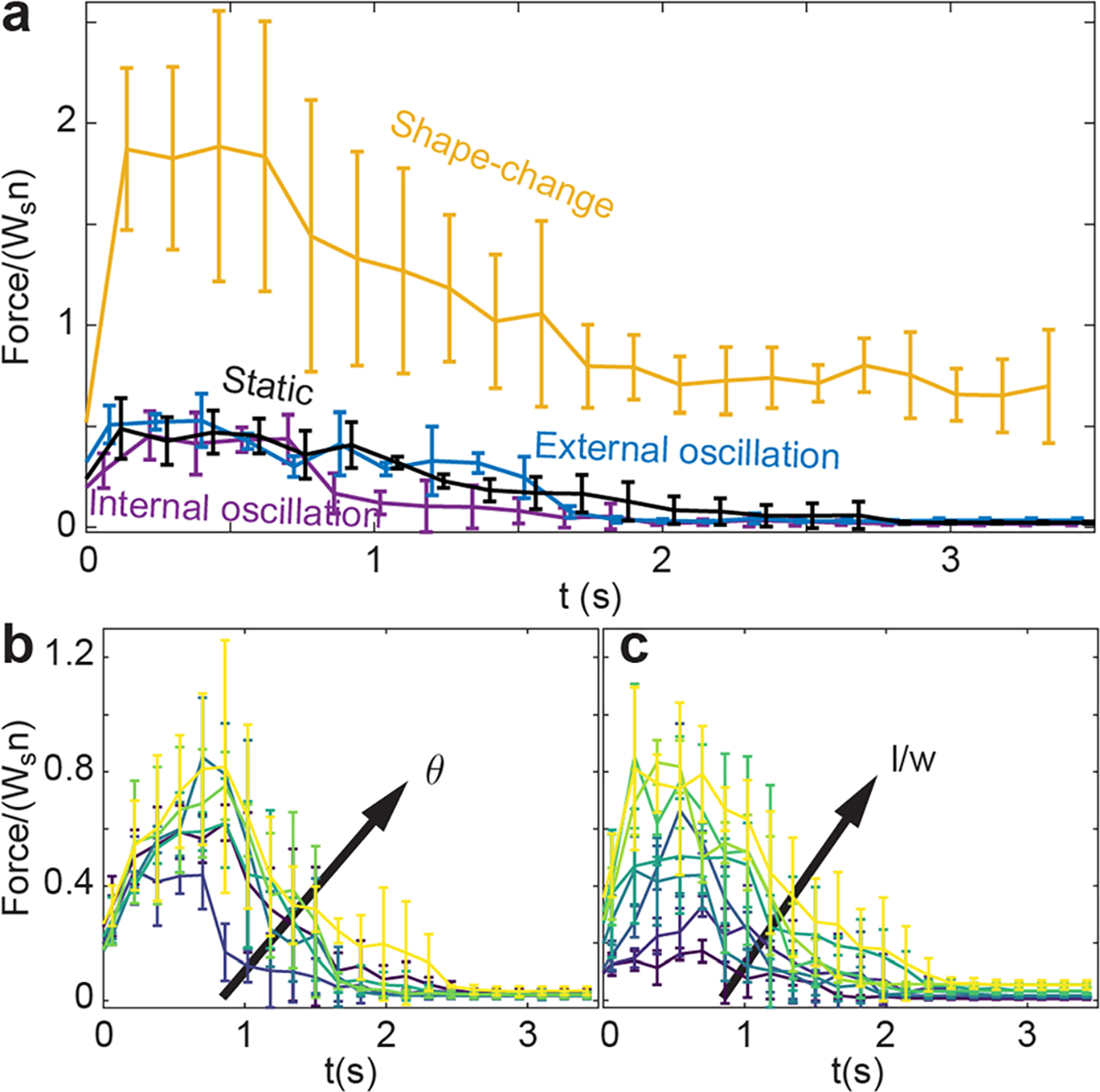
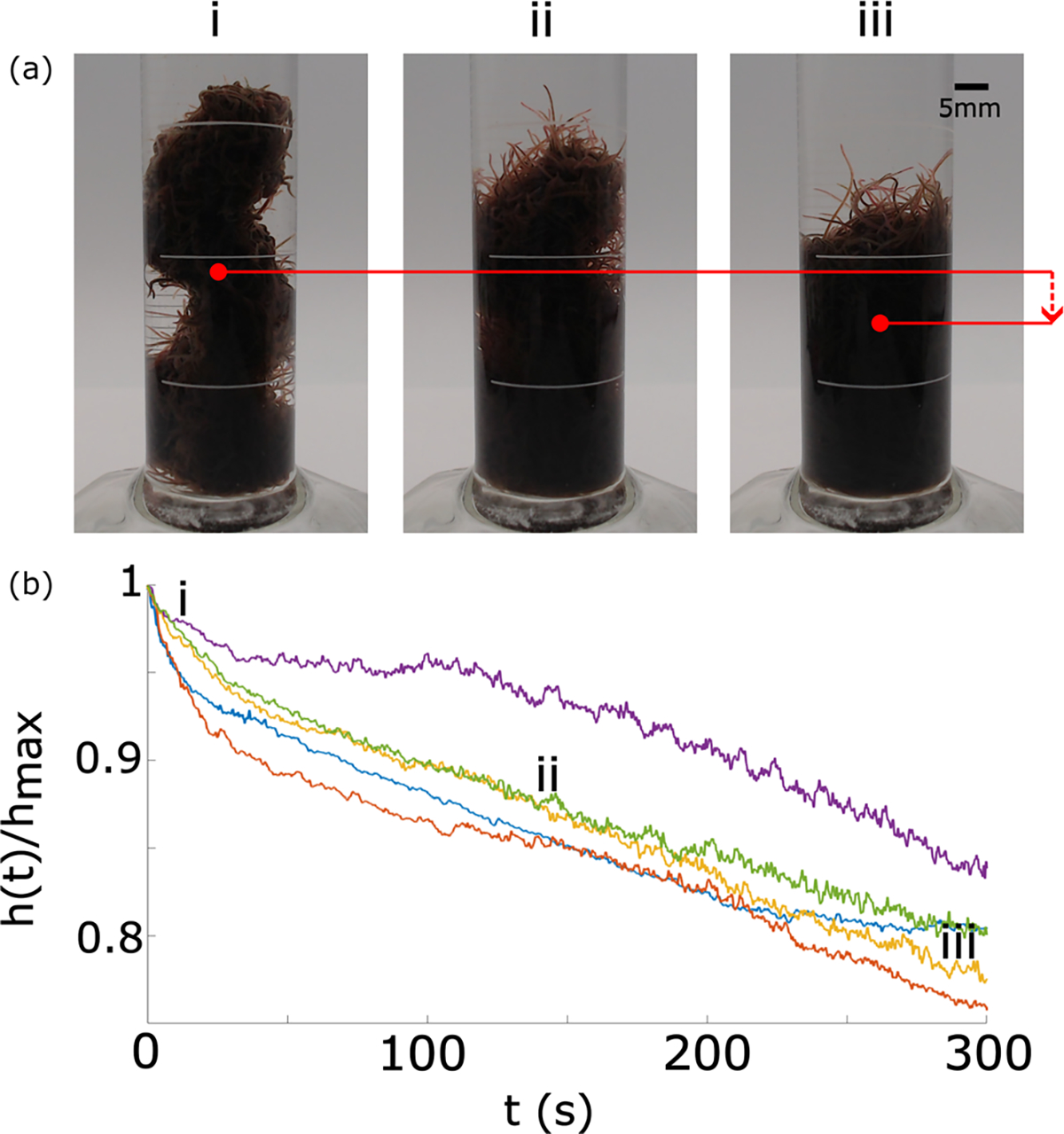
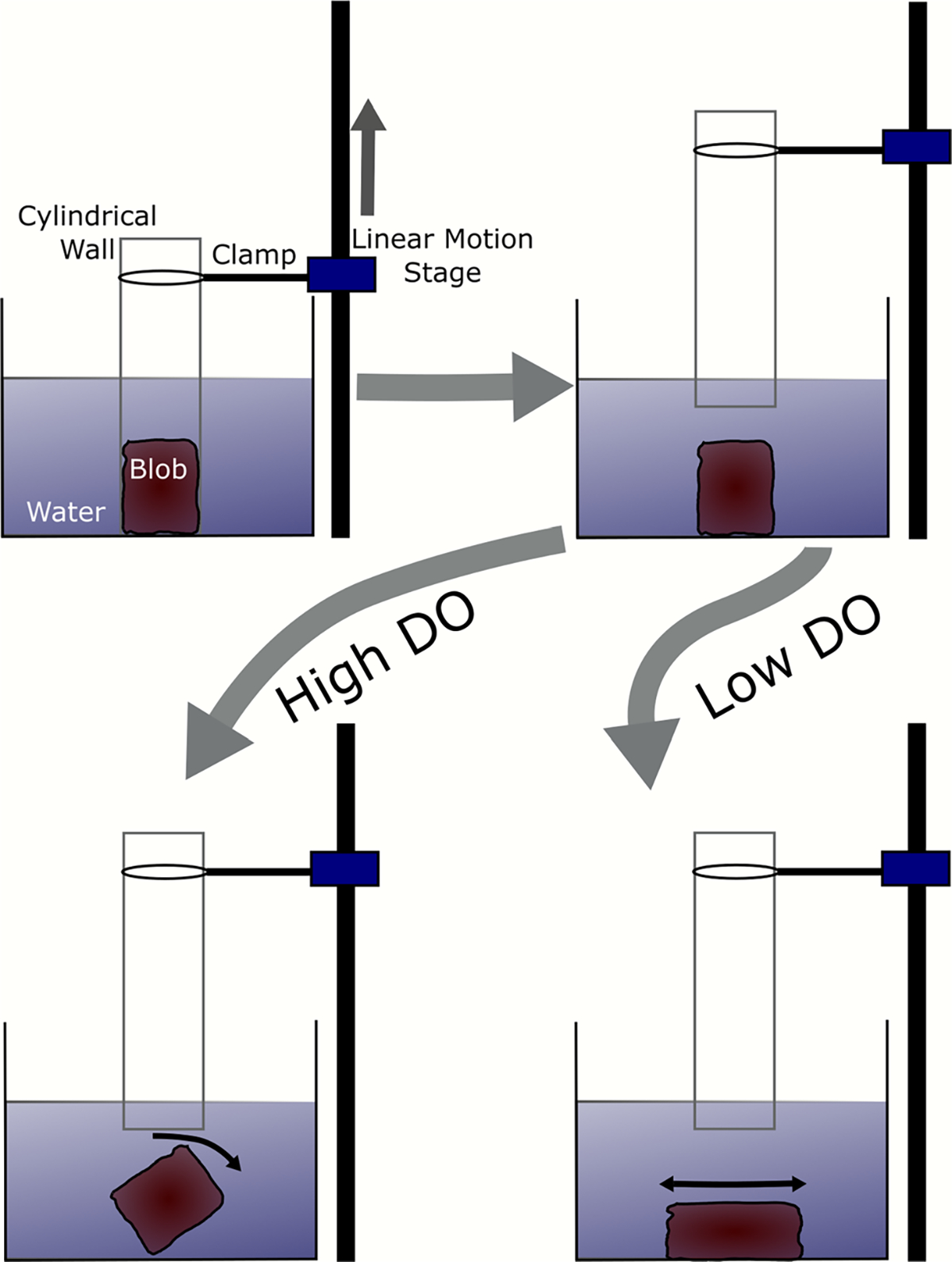
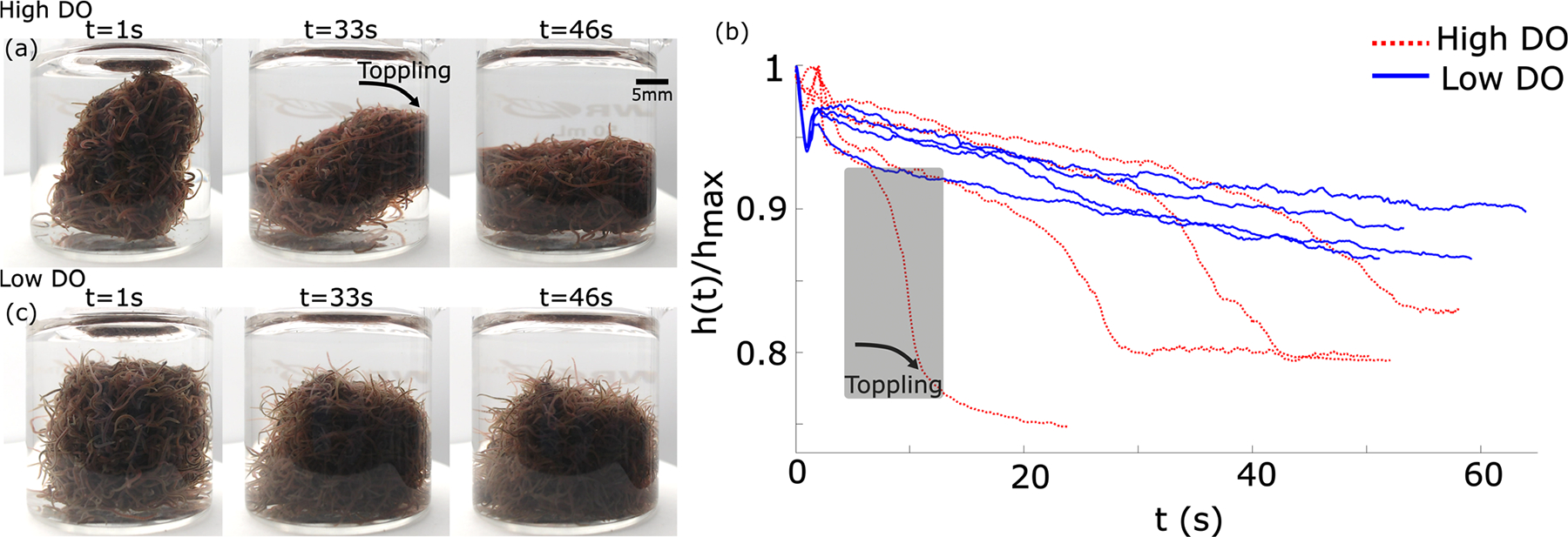
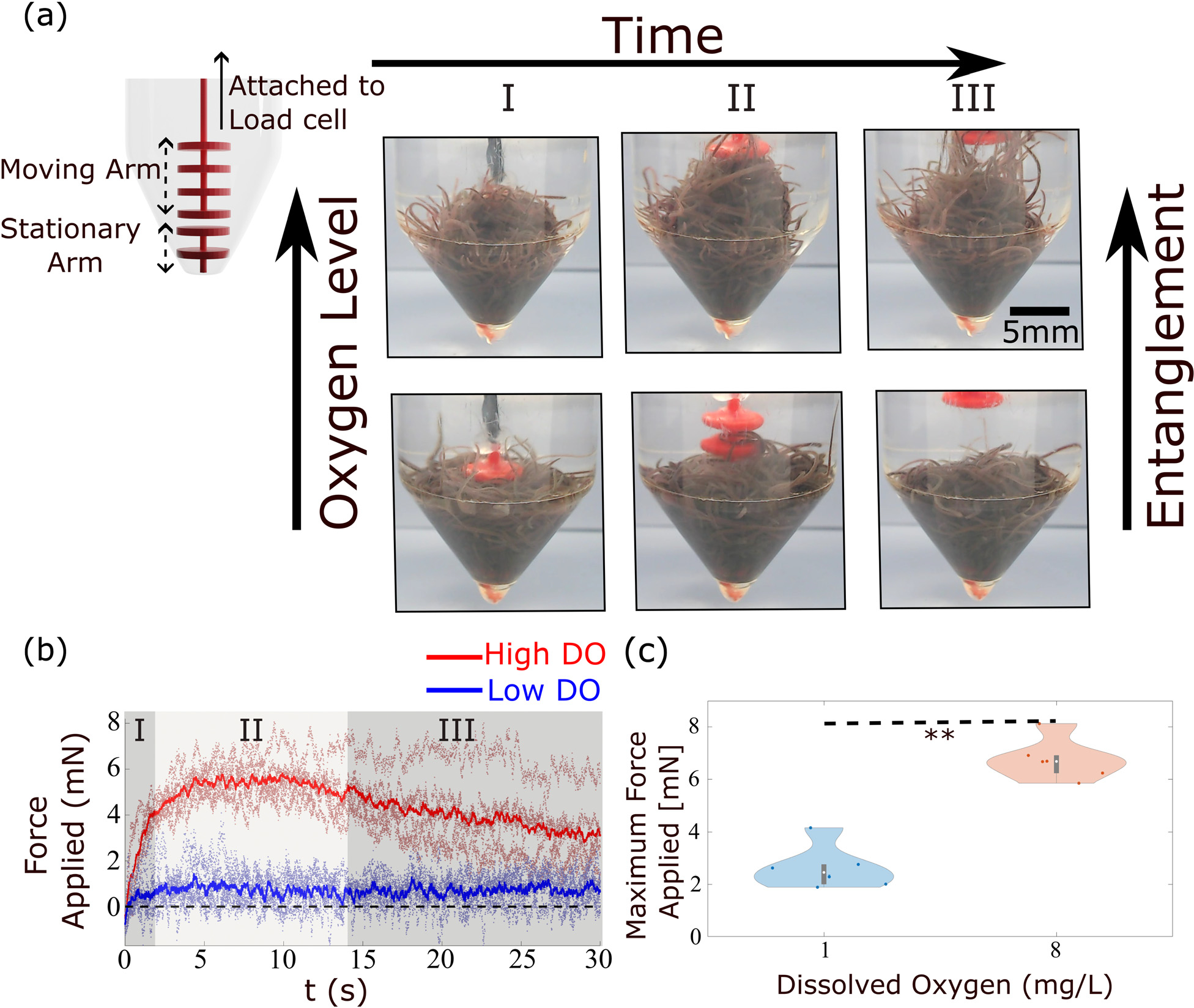
The design of amorphous entangled systems, specifically from soft and active materials, has the potential to open exciting new classes of active, shape-shifting, and task-capable 'smart' materials. However, the global emergent mechanics that arise from the local interactions of individual particles are not well understood. In this study, we examine the emergent properties of amorphous entangled systems in an in silico collection of u-shaped particles ("smarticles") and in living entangled aggregate of worm blobs (L. variegatus). In simulations, we examine how material properties change for a collective composed of smarticles as they undergo different forcing protocols. We compare three methods of controlling entanglement in the collective: external oscillations of the ensemble, sudden shape-changes of all individuals, and sustained internal oscillations of all individuals. We find that large-amplitude changes of the particle's shape using the shape-change procedure produce the largest average number of entanglements, with respect to the aspect ratio (l/w), thus improving the tensile strength of the collective. We demonstrate applications of these simulations by showing how the individual worm activity in a blob can be controlled through the ambient dissolved oxygen in water, leading to complex emergent properties of the living entangled collective, such as solid-like entanglement and tumbling. Our work reveals principles by which future shape-modulating, potentially soft robotic systems may dynamically alter their material properties, advancing our understanding of living entangled materials, while inspiring new classes of synthetic emergent super-materials.
Conflict of interest statement
Conflicts of interest
There are no conflicts to declare.
Figures
Similar articles
-
Worm blobs as entangled living polymers: from topological active matter to flexible soft robot collectives.Soft Matter. 2023 Sep 27;19(37):7057-7069. doi: 10.1039/d3sm00542a. Soft Matter. 2023. PMID: 37706563 Free PMC article. Review.
-
Collective dynamics in entangled worm and robot blobs.Proc Natl Acad Sci U S A. 2021 Feb 9;118(6):e2010542118. doi: 10.1073/pnas.2010542118. Proc Natl Acad Sci U S A. 2021. PMID: 33547237 Free PMC article.
-
Oxygenation-Controlled Collective Dynamics in Aquatic Worm Blobs.Integr Comp Biol. 2022 Oct 29;62(4):890-896. doi: 10.1093/icb/icac089. Integr Comp Biol. 2022. PMID: 35689658 Free PMC article.
-
Elongating, entwining, and dragging: mechanism for adaptive locomotion of tubificine worm blobs in a confined environment.Front Neurorobot. 2023 Aug 29;17:1207374. doi: 10.3389/fnbot.2023.1207374. eCollection 2023. Front Neurorobot. 2023. PMID: 37706011 Free PMC article.
-
Electric and Magnetic Field-Driven Dynamic Structuring for Smart Functional Devices.Micromachines (Basel). 2023 Mar 16;14(3):661. doi: 10.3390/mi14030661. Micromachines (Basel). 2023. PMID: 36985068 Free PMC article. Review.
Cited by
-
Collecting-Gathering Biophysics of the Blackworm Lumbriculus variegatus.Integr Comp Biol. 2023 Dec 29;63(6):1474-1484. doi: 10.1093/icb/icad080. Integr Comp Biol. 2023. PMID: 37370237 Free PMC article.
-
Leeches Predate on Fast-Escaping and Entangling Blackworms by Spiral Entombment.Integr Comp Biol. 2024 Nov 21;64(5):1408-1415. doi: 10.1093/icb/icae118. Integr Comp Biol. 2024. PMID: 39025808 Free PMC article.
-
Robo-Matter towards reconfigurable multifunctional smart materials.Nat Commun. 2024 Oct 14;15(1):8853. doi: 10.1038/s41467-024-53123-6. Nat Commun. 2024. PMID: 39402043 Free PMC article.
-
Collecting-Gathering Biophysics of the Blackworm L. variegatus.bioRxiv [Preprint]. 2023 Apr 29:2023.04.28.538726. doi: 10.1101/2023.04.28.538726. bioRxiv. 2023. Update in: Integr Comp Biol. 2023 Dec 29;63(6):1474-1484. doi: 10.1093/icb/icad080. PMID: 37162967 Free PMC article. Updated. Preprint.
-
Worm blobs as entangled living polymers: from topological active matter to flexible soft robot collectives.Soft Matter. 2023 Sep 27;19(37):7057-7069. doi: 10.1039/d3sm00542a. Soft Matter. 2023. PMID: 37706563 Free PMC article. Review.
References
-
- Hu D, Phonekeo S, Altshuler E and Brochard-Wyart F, Eur. Phys. J.: Spec. Top, 2016, 225, 629–649.
-
- Blackiston D, Lederer E, Kriegman S, Garnier S, Bongard J and Levin M, Sci. Robot, 2021, 6, eabf1571. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources