

Quantification of the methodological error in kinematic evaluation of the DRUJ using dynamic CT
- PMID: 36823242
- PMCID: PMC9950078
- DOI: 10.1038/s41598-023-29726-2
Quantification of the methodological error in kinematic evaluation of the DRUJ using dynamic CT
Abstract
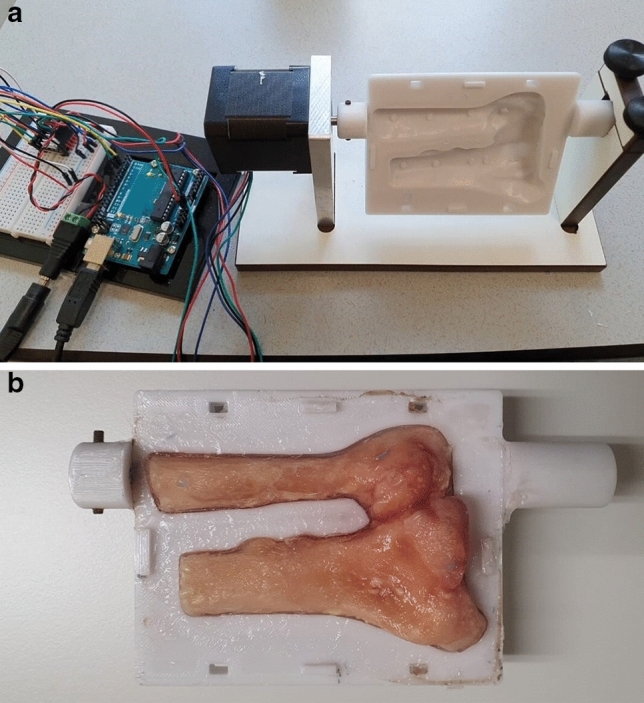
Distal radio-ulnar joint (DRUJ) motion analysis using dynamic CT is gaining popularity. Following scanning and segmentation, 3D bone models are registered to (4D-)CT target frames. Imaging errors like low signal-to-noise ratio (SNR), limited Z-coverage and motion artefacts influence registration, causing misinterpretation of joint motion. This necessitates quantification of the methodological error. A cadaver arm and dynamic phantom were subjected to multiple 4D-CT scans, while varying tube charge-time product and phantom angular velocity, to evaluate the effects of SNR and motion artefacts on registration accuracy and precision. 4D-CT Z-coverage is limited by the scanner. To quantify the effects of different Z-coverages on registration accuracy and precision, 4D-CT was simulated by acquiring multiple spiral 3D-CT scans of the cadaver arm. Z-coverage was varied by clipping the 3D bone models prior to registration. The radius position relative to the ulna was obtained from the segmentation image. Apparent relative displacement seen in the target images is caused by registration errors. Worst-case translations were 0.45, 0.08 and 1.1 mm for SNR-, Z-coverage- and motion-related errors respectively. Worst-case rotations were 0.41, 0.13 and 6.0 degrees. This study showed that quantification of the methodological error enables composition of accurate and precise DRUJ motion scanning protocols.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures






References
-
- Verdun, F. R. et al.Image quality in CT: From physical measurements to model observers10.1016/j.ejmp.2015.08.007 (2015). - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
