

Spatial Control over Catalyst Positioning for Increased Micromotor Efficiency
- PMID: 36826334
- PMCID: PMC9957166
- DOI: 10.3390/gels9020164
Spatial Control over Catalyst Positioning for Increased Micromotor Efficiency
Abstract
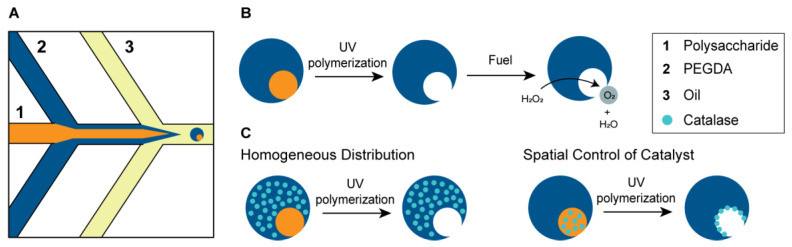
Motion is influenced by many different aspects of a micromotor's design, such as shape, roughness and the type of materials used. When designing a motor, asymmetry is the main requirement to take into account, either in shape or in catalyst distribution. It influences both speed and directionality since it dictates the location of propulsion force. Here, we combine asymmetry in shape and asymmetry in catalyst distribution to study the motion of soft micromotors. A microfluidic method is utilized to generate aqueous double emulsions, which upon UV-exposure form asymmetric microgels. Taking advantage of the flexibility of this method, we fabricated micromotors with homogeneous catalyst distribution throughout the microbead and micromotors with different degrees of catalyst localization within the active site. Spatial control over catalyst positioning is advantageous since less enzyme is needed for the same propulsion speed as the homogeneous system and it provides further confinement and compartmentalization of the catalyst. This proof-of-concept of our new design will make the use of enzymes as driving forces for motors more accessible, as well as providing a new route for compartmentalizing enzymes at interfaces without the need for catalyst-specific functionalization.
Keywords: aqueous phase separation; autonomous motion; microfluidics; micromotor; spatial localization.
Conflict of interest statement
The authors declare no conflict of interest.
Figures



Similar articles
-
Influence of Enzyme Quantity and Distribution on the Self-Propulsion of Non-Janus Urease-Powered Micromotors.J Am Chem Soc. 2018 Jun 27;140(25):7896-7903. doi: 10.1021/jacs.8b03460. Epub 2018 May 29. J Am Chem Soc. 2018. PMID: 29786426
-
Microfluidic Fabrication of Bubble-Propelled Micromotors for Wastewater Treatment.ACS Appl Mater Interfaces. 2019 Jun 26;11(25):22761-22767. doi: 10.1021/acsami.9b05925. Epub 2019 Jun 15. ACS Appl Mater Interfaces. 2019. PMID: 31203603
-
Influence of Asymmetry and Driving Forces on the Propulsion of Bubble-Propelled Catalytic Micromotors.Micromachines (Basel). 2016 Dec 14;7(12):229. doi: 10.3390/mi7120229. Micromachines (Basel). 2016. PMID: 30404402 Free PMC article.
-
Analyte Sensing with Catalytic Micromotors.Biosensors (Basel). 2022 Dec 28;13(1):45. doi: 10.3390/bios13010045. Biosensors (Basel). 2022. PMID: 36671880 Free PMC article. Review.
-
Geometry Design, Principles and Assembly of Micromotors.Micromachines (Basel). 2018 Feb 11;9(2):75. doi: 10.3390/mi9020075. Micromachines (Basel). 2018. PMID: 30393351 Free PMC article. Review.
Cited by
-
A Simple Vortex-Based Method for the Generation of High-Throughput Spherical Micro- and Nanohydrogels.Int J Mol Sci. 2025 Jun 30;26(13):6300. doi: 10.3390/ijms26136300. Int J Mol Sci. 2025. PMID: 40650077 Free PMC article.
-
Anisotropic, Hydrogel Microparticles as pH-Responsive Drug Carriers for Oral Administration of 5-FU.Pharmaceutics. 2023 Apr 30;15(5):1380. doi: 10.3390/pharmaceutics15051380. Pharmaceutics. 2023. PMID: 37242622 Free PMC article.
References
-
- Wang H., Zhao G., Pumera M. Crucial Role of Surfactants in Bubble-Propelled Microengines. J. Phys. Chem. C. 2014;118:5268–5274. doi: 10.1021/jp410003e. - DOI
-
- Manjare M., Yang F., Qiao R., Zhao Y. Marangoni Flow Induced Collective Motion of Catalytic Micromotors. J. Phys. Chem. C. 2015;119:28361–28367. doi: 10.1021/acs.jpcc.5b07251. - DOI
-
- Mao Z., Shimamoto G., Maeda S. Conical frustum gel driven by the Marangoni effect for a motor without a stator. Colloids Surf. A. 2021;608:125561. doi: 10.1016/j.colsurfa.2020.125561. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
