

A New Wrist-Forearm Rehabilitation Protocol Integrating Human Biomechanics and SVM-Based Machine Learning for Muscle Fatigue Estimation
- PMID: 36829713
- PMCID: PMC9952609
- DOI: 10.3390/bioengineering10020219
A New Wrist-Forearm Rehabilitation Protocol Integrating Human Biomechanics and SVM-Based Machine Learning for Muscle Fatigue Estimation
Abstract
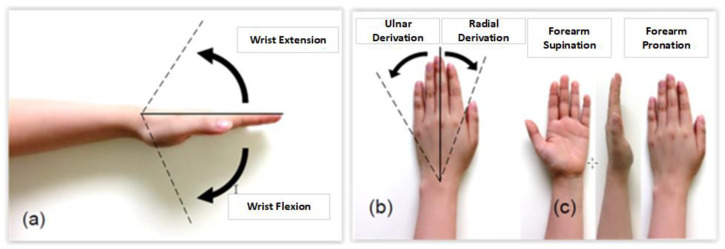
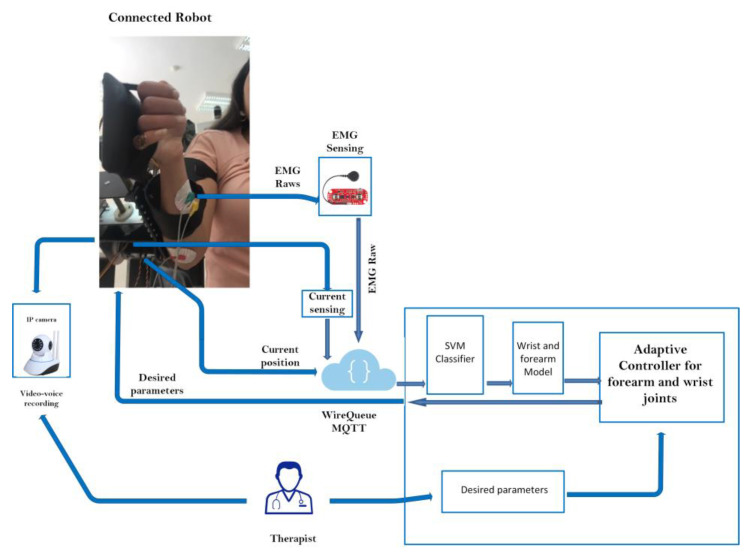
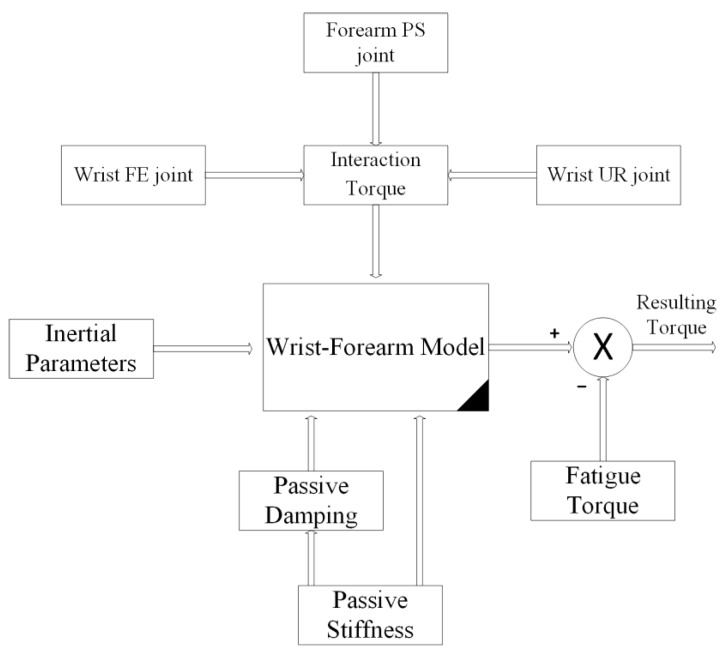
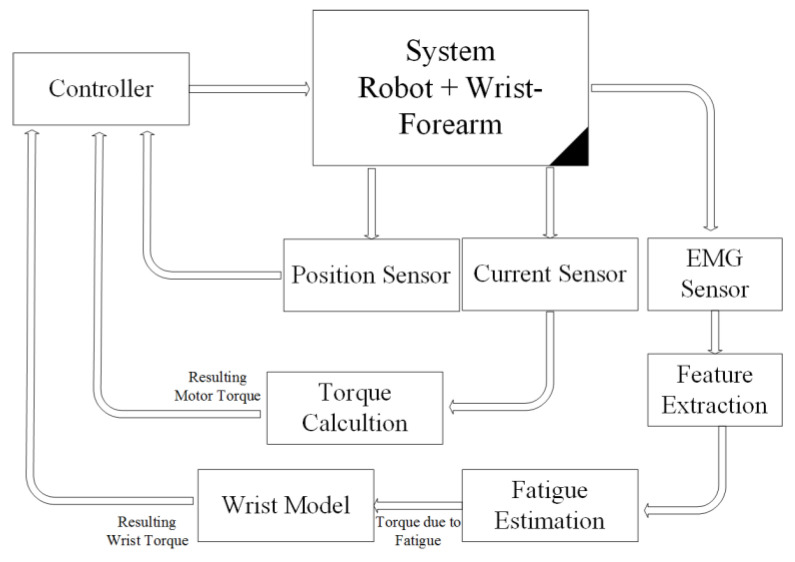
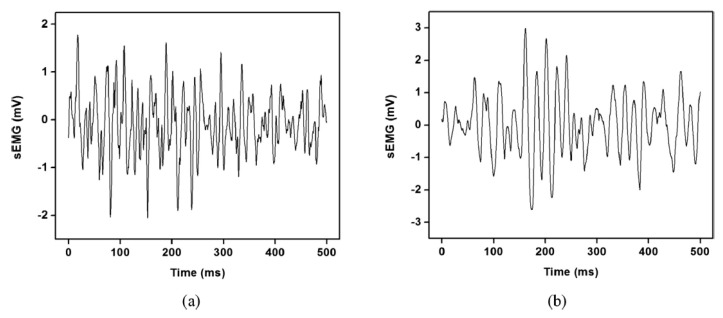
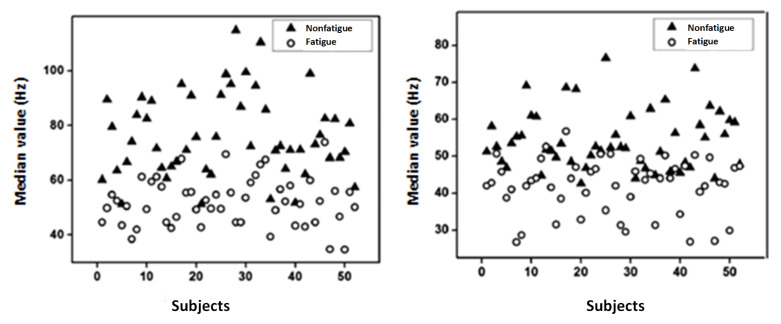
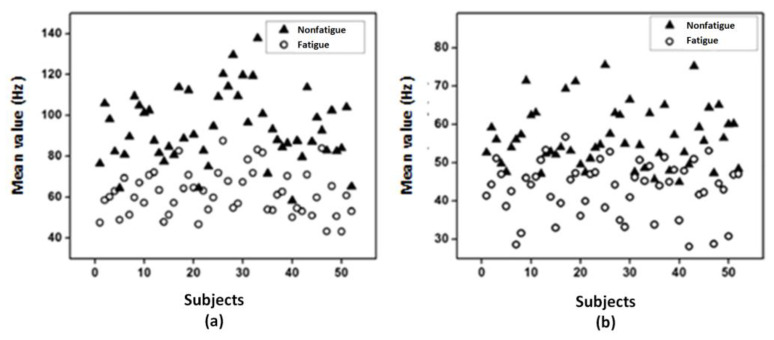
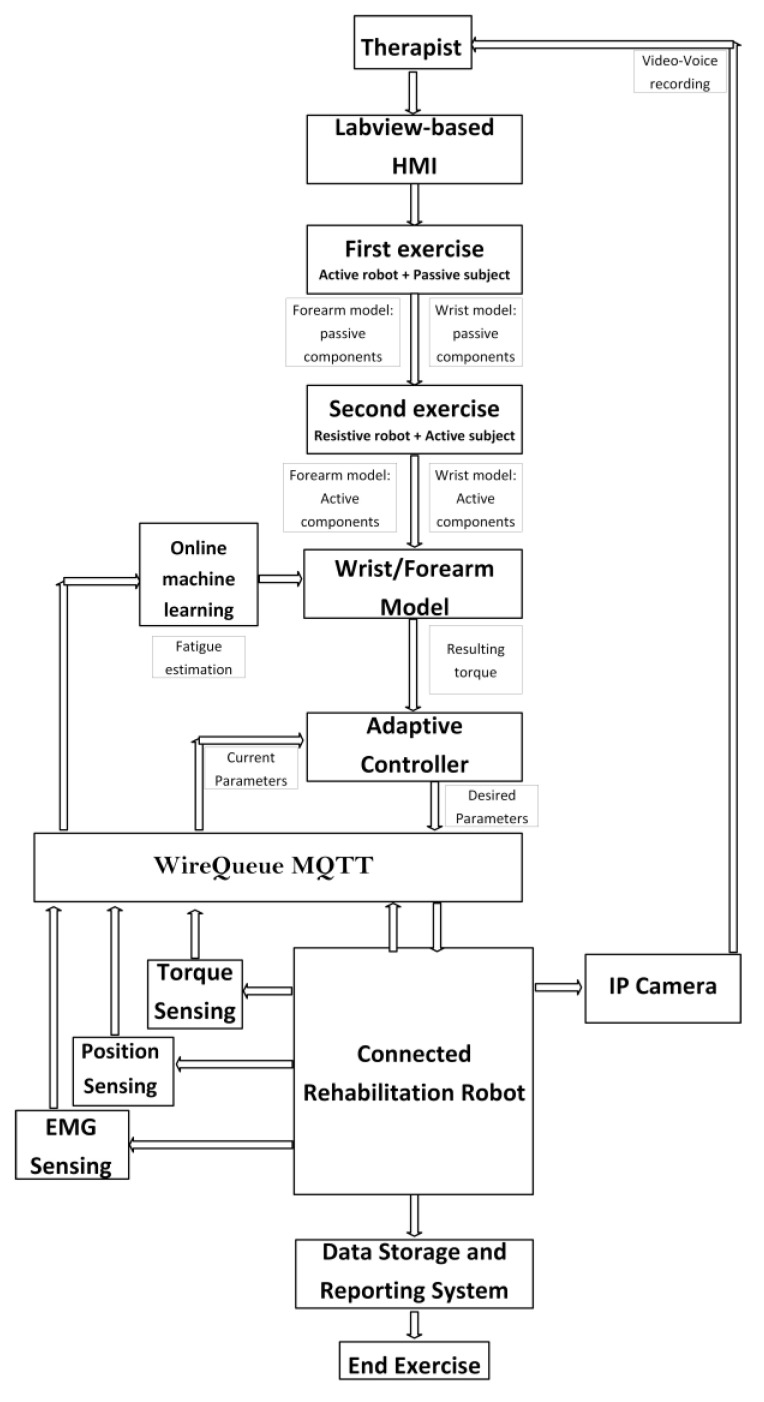
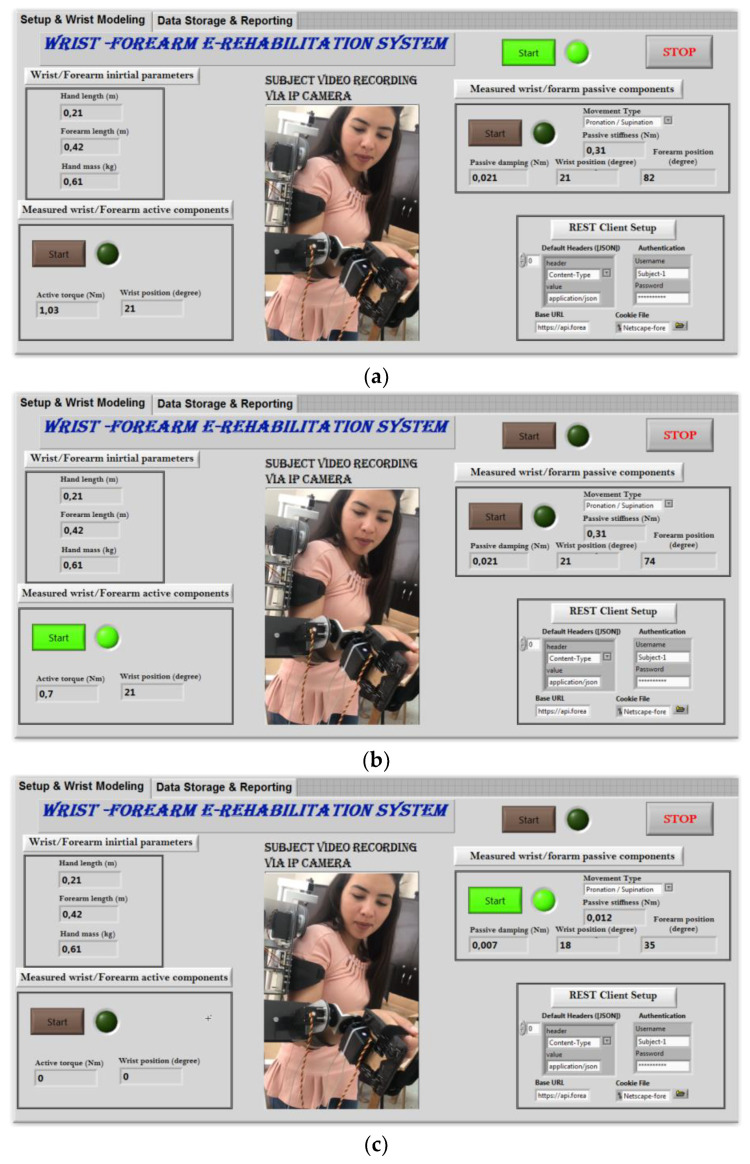
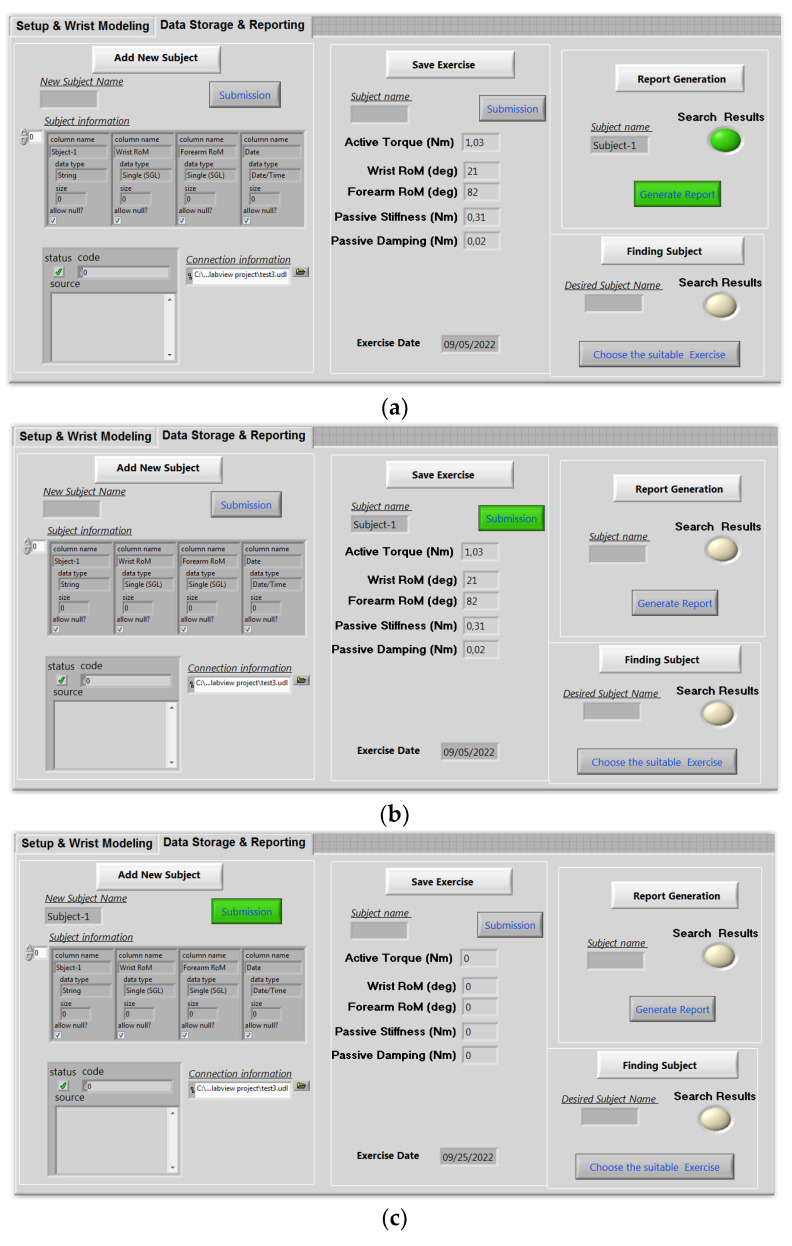
In this research, a new remote rehabilitation system was developed that integrates an IoT-based connected robot intended for wrist and forearm rehabilitation. In fact, the mathematical model of the wrist and forearm joints was developed and integrated into the main controller. The proposed new rehabilitation protocol consists of three main sessions: the first is dedicated to the extraction of the passive components of the dynamic model of wrist-forearm biomechanics while the active components are extracted in the second session. The third session consists of performing continuous exercises using the determined dynamic model of the forearm-wrist joints, taking into account the torque generated by muscle fatigue. The main objective of this protocol is to determine the state level of the affected wrist and above all to provide a dynamic model in which the torque generated by the robot and the torque supplied by the patient are combined, taking into account the constraints of fatigue. A Support Vector Machine (SVM) classifier is designed for the estimation of muscle fatigue based on the features extracted from the electromyography (EMG) signal acquired from the patient. The results show that the developed rehabilitation system allows a good progression of the joint's range of motion as well as the resistive-active torques.
Keywords: SVM classifier; human robot interaction; machine learning; robotic rehabilitation; wrist–forearm biomechanics.
Conflict of interest statement
The authors declare no conflict of interest.
Figures


Similar articles
-
Design and Development of a Smart IoT-Based Robotic Solution for Wrist Rehabilitation.Micromachines (Basel). 2022 Jun 19;13(6):973. doi: 10.3390/mi13060973. Micromachines (Basel). 2022. PMID: 35744587 Free PMC article.
-
Myoelectrically controlled wrist robot for stroke rehabilitation.J Neuroeng Rehabil. 2013 Jun 10;10:52. doi: 10.1186/1743-0003-10-52. J Neuroeng Rehabil. 2013. PMID: 23758925 Free PMC article. Clinical Trial.
-
Characterizing forearm muscle activity in young adults during dynamic wrist flexion-extension movement using a wrist robot.J Biomech. 2020 Jul 17;108:109908. doi: 10.1016/j.jbiomech.2020.109908. Epub 2020 Jun 21. J Biomech. 2020. PMID: 32636014
-
A comparison between electromyography-driven robot and passive motion device on wrist rehabilitation for chronic stroke.Neurorehabil Neural Repair. 2009 Oct;23(8):837-46. doi: 10.1177/1545968309338191. Epub 2009 Jun 16. Neurorehabil Neural Repair. 2009. PMID: 19531605 Clinical Trial.
-
Computer Modelling of Wrist Biomechanics: Translation into Specific Tasks and Injuries.Curr Rheumatol Rev. 2020;16(3):178-183. doi: 10.2174/1573397115666190119095311. Curr Rheumatol Rev. 2020. PMID: 30659546 Review.
Cited by
-
Myoelectric, Myo-Oxygenation, and Myotonometry Changes during Robot-Assisted Bilateral Arm Exercises with Varying Resistances.Sensors (Basel). 2024 Feb 6;24(4):1061. doi: 10.3390/s24041061. Sensors (Basel). 2024. PMID: 38400219 Free PMC article.
-
Data Processing and Machine Learning for Assistive and Rehabilitation Technologies.Bioengineering (Basel). 2025 Jan 15;12(1):70. doi: 10.3390/bioengineering12010070. Bioengineering (Basel). 2025. PMID: 39851344 Free PMC article.
-
Hybrid EMG-NMES control for real-time muscle fatigue reduction in bionic hands.Sci Rep. 2025 Jul 2;15(1):22467. doi: 10.1038/s41598-025-05829-w. Sci Rep. 2025. PMID: 40593021 Free PMC article.
-
AI-driven hybrid rehabilitation: synergizing robotics and electrical stimulation for upper-limb recovery after stroke.Front Bioeng Biotechnol. 2025 Jun 25;13:1619247. doi: 10.3389/fbioe.2025.1619247. eCollection 2025. Front Bioeng Biotechnol. 2025. PMID: 40635696 Free PMC article.
-
Extended Wrist Rotation Simplified.Cureus. 2024 Feb 16;16(2):e54319. doi: 10.7759/cureus.54319. eCollection 2024 Feb. Cureus. 2024. PMID: 38371435 Free PMC article.
References
-
- Samaee S., Kobravi H.R. Predicting the occurrence of wrist tremor based on electromyography using a hidden Markov model and entropy based learning algorithm. Biomed. Signal Process. Control. 2020;57:101739. doi: 10.1016/j.bspc.2019.101739. - DOI
-
- Moshaii A.A., Moghaddam M.M., Niestanak V.D. Fuzzy sliding mode control of a wearable rehabilitation robot for wrist and finger. Ind. Robot. 2019;46:839–850. doi: 10.1108/IR-05-2019-0110. - DOI
-
- Bauer G., Pan Y.-J. Review of Control Methods for Upper Limb Telerehabilitation with Robotic Exoskeletons. IEEE Access. 2020;8:203382–203397. doi: 10.1109/ACCESS.2020.3036596. - DOI
-
- Rozevink S.G., van der Sluis C.K., Garzo A., Keller T., Hijmans J.M. HoMEcare aRm rehabiLItatioN (MERLIN): Telerehabilitation using an unactuated device based on serious games improves the upper limb function in chronic stroke. J. Neuroeng. Rehabil. 2021;18:48. doi: 10.1186/s12984-021-00841-3. - DOI - PMC - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
