

A New Wrist-Forearm Rehabilitation Protocol Integrating Human Biomechanics and SVM-Based Machine Learning for Muscle Fatigue Estimation
- PMID: 36829713
- PMCID: PMC9952609
- DOI: 10.3390/bioengineering10020219
A New Wrist-Forearm Rehabilitation Protocol Integrating Human Biomechanics and SVM-Based Machine Learning for Muscle Fatigue Estimation
Abstract
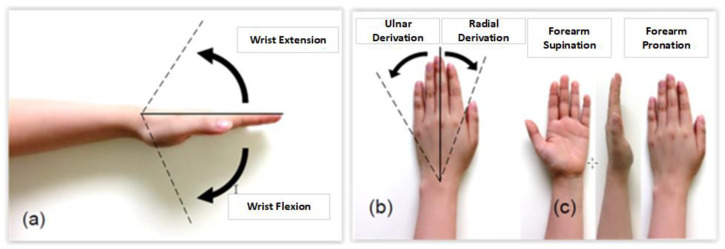
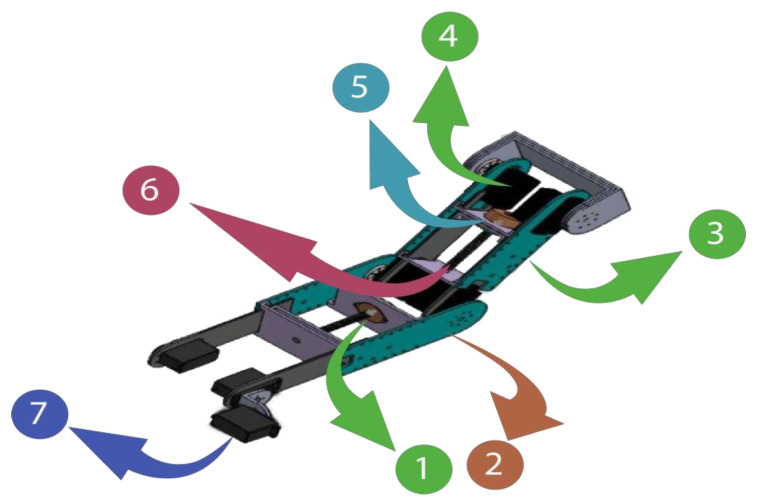
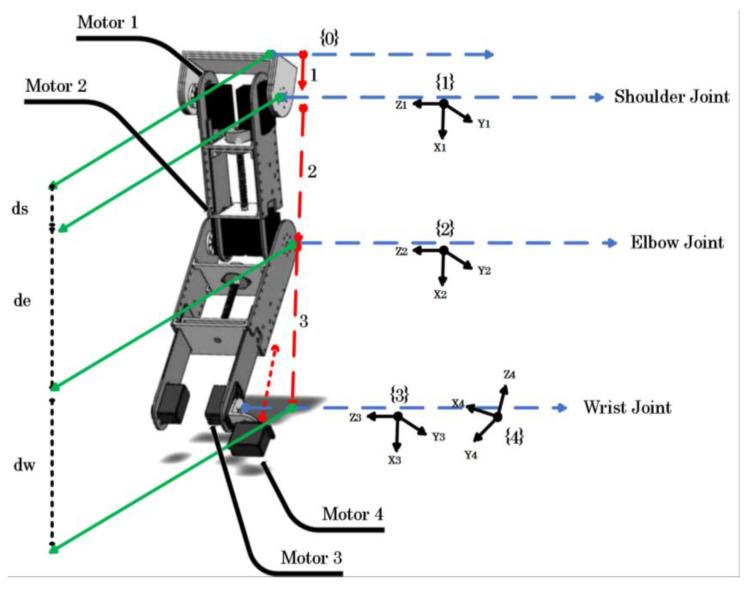
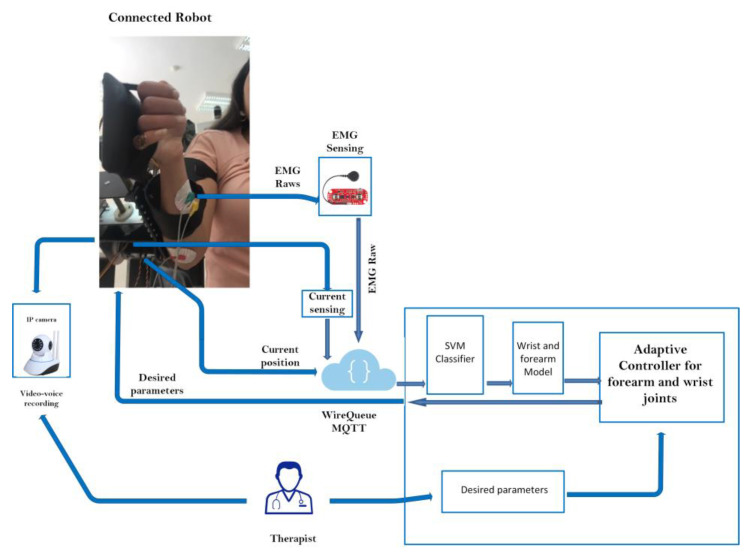
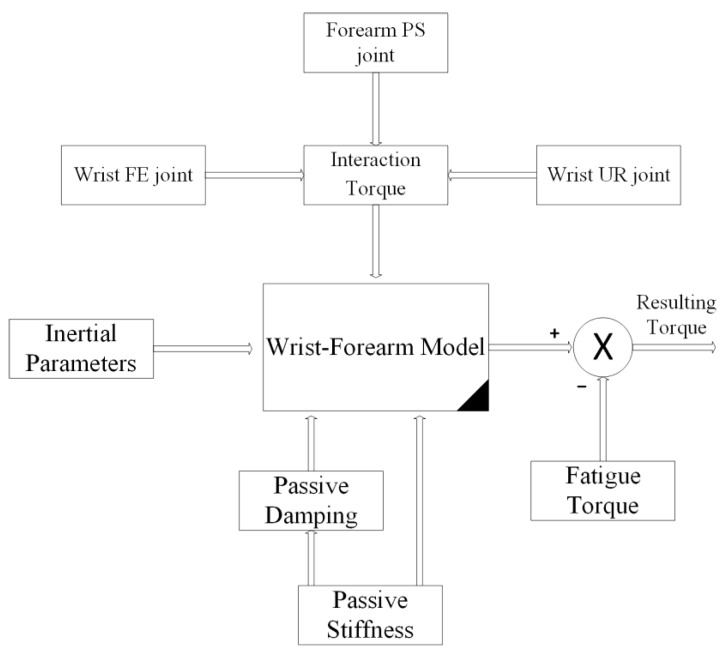
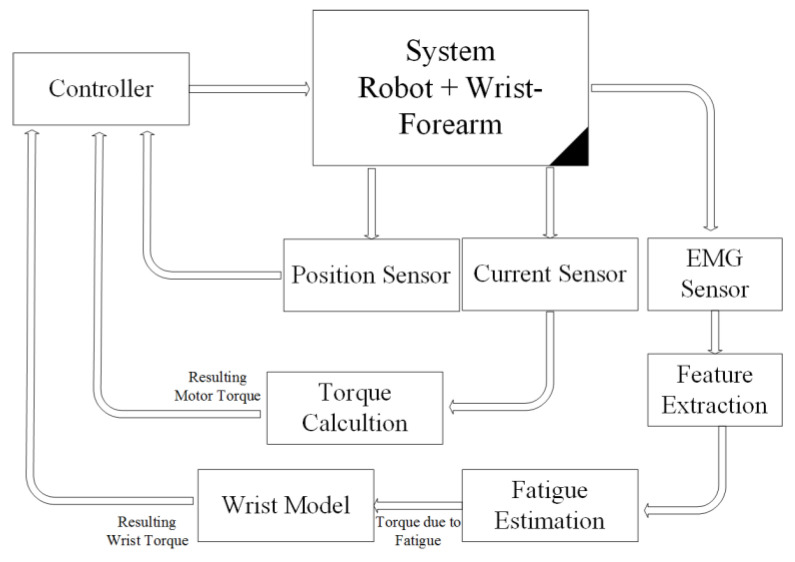
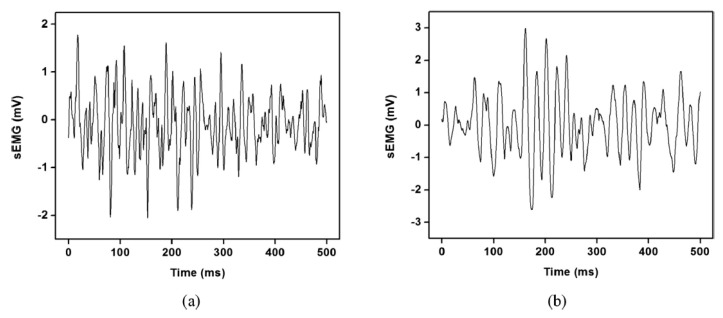
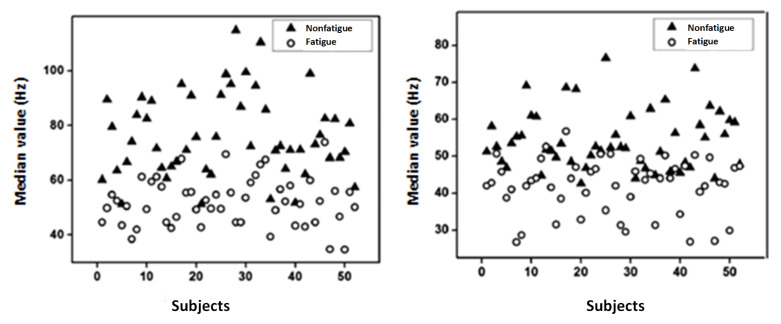
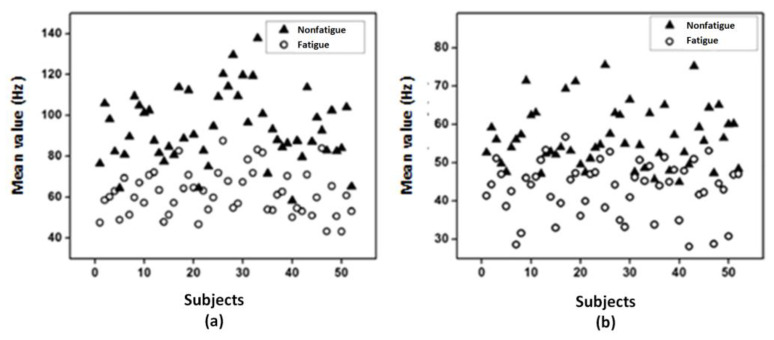
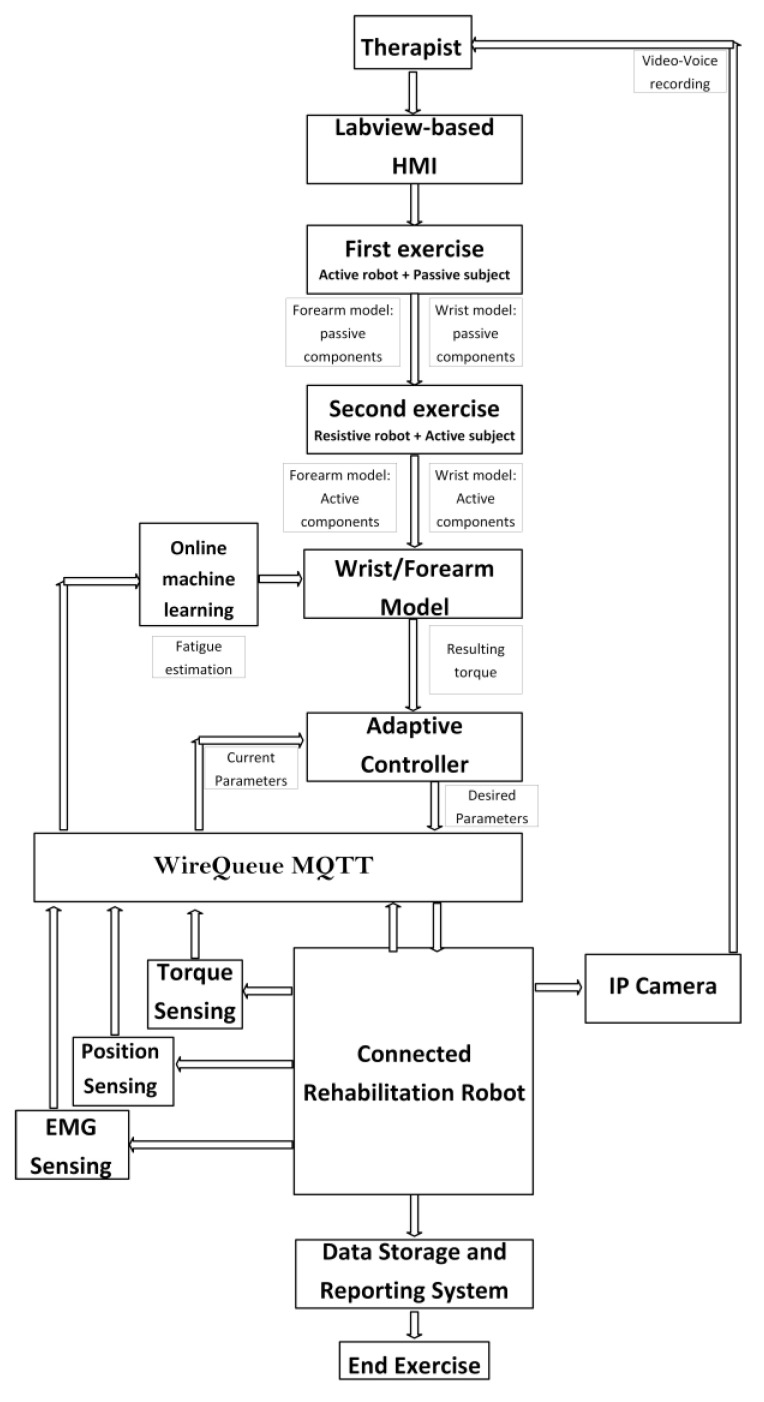
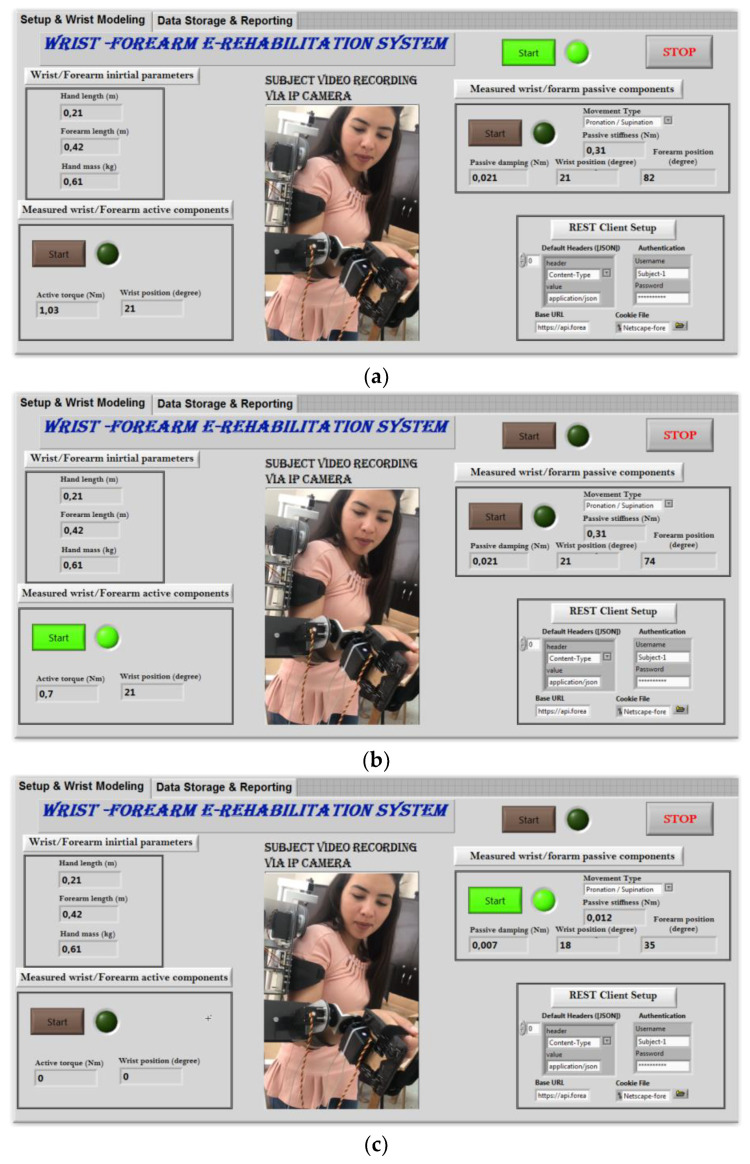
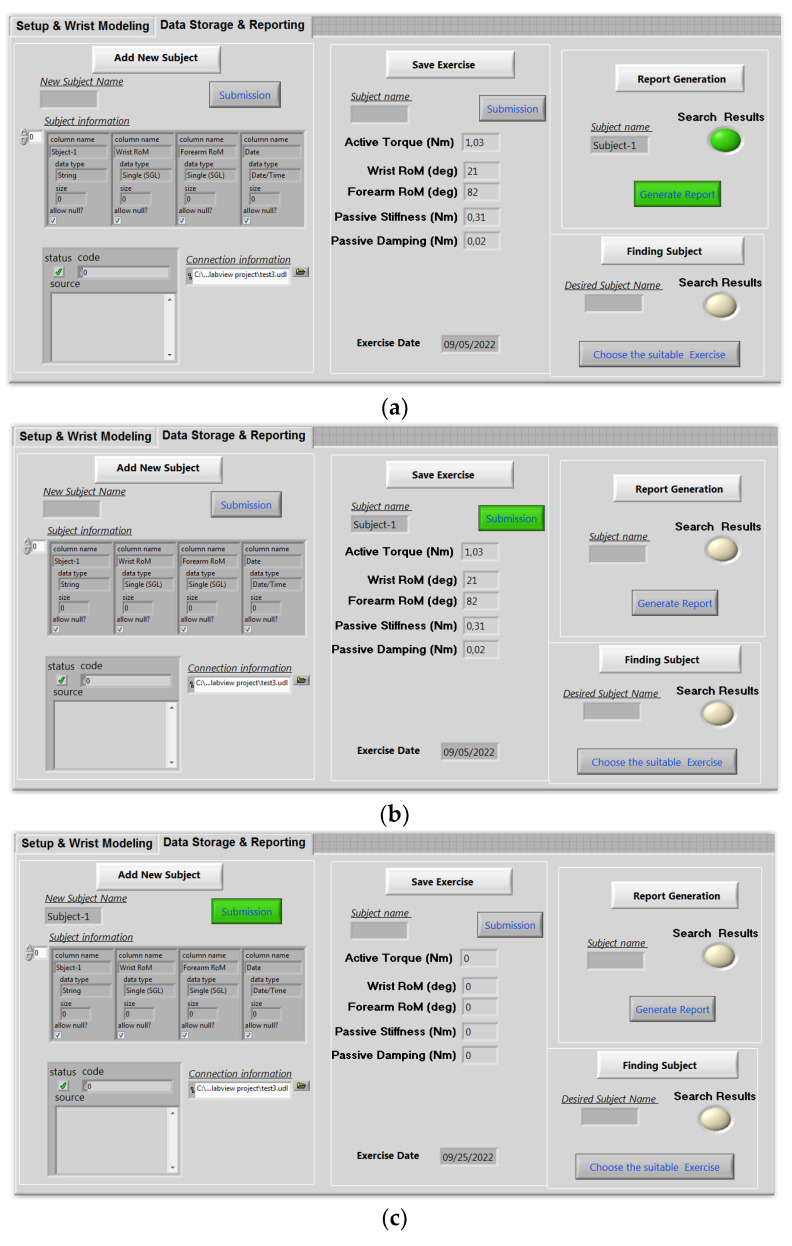
In this research, a new remote rehabilitation system was developed that integrates an IoT-based connected robot intended for wrist and forearm rehabilitation. In fact, the mathematical model of the wrist and forearm joints was developed and integrated into the main controller. The proposed new rehabilitation protocol consists of three main sessions: the first is dedicated to the extraction of the passive components of the dynamic model of wrist-forearm biomechanics while the active components are extracted in the second session. The third session consists of performing continuous exercises using the determined dynamic model of the forearm-wrist joints, taking into account the torque generated by muscle fatigue. The main objective of this protocol is to determine the state level of the affected wrist and above all to provide a dynamic model in which the torque generated by the robot and the torque supplied by the patient are combined, taking into account the constraints of fatigue. A Support Vector Machine (SVM) classifier is designed for the estimation of muscle fatigue based on the features extracted from the electromyography (EMG) signal acquired from the patient. The results show that the developed rehabilitation system allows a good progression of the joint's range of motion as well as the resistive-active torques.
Keywords: SVM classifier; human robot interaction; machine learning; robotic rehabilitation; wrist–forearm biomechanics.
Conflict of interest statement
The authors declare no conflict of interest.
Figures


References
-
- Samaee S., Kobravi H.R. Predicting the occurrence of wrist tremor based on electromyography using a hidden Markov model and entropy based learning algorithm. Biomed. Signal Process. Control. 2020;57:101739. doi: 10.1016/j.bspc.2019.101739. - DOI
-
- Moshaii A.A., Moghaddam M.M., Niestanak V.D. Fuzzy sliding mode control of a wearable rehabilitation robot for wrist and finger. Ind. Robot. 2019;46:839–850. doi: 10.1108/IR-05-2019-0110. - DOI
-
- Bauer G., Pan Y.-J. Review of Control Methods for Upper Limb Telerehabilitation with Robotic Exoskeletons. IEEE Access. 2020;8:203382–203397. doi: 10.1109/ACCESS.2020.3036596. - DOI
-
- Rozevink S.G., van der Sluis C.K., Garzo A., Keller T., Hijmans J.M. HoMEcare aRm rehabiLItatioN (MERLIN): Telerehabilitation using an unactuated device based on serious games improves the upper limb function in chronic stroke. J. Neuroeng. Rehabil. 2021;18:48. doi: 10.1186/s12984-021-00841-3. - DOI - PMC - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
