

Symmetrical Efficient Gait Planning Based on Constrained Direct Collocation
- PMID: 36838117
- PMCID: PMC9967241
- DOI: 10.3390/mi14020417
Symmetrical Efficient Gait Planning Based on Constrained Direct Collocation
Abstract
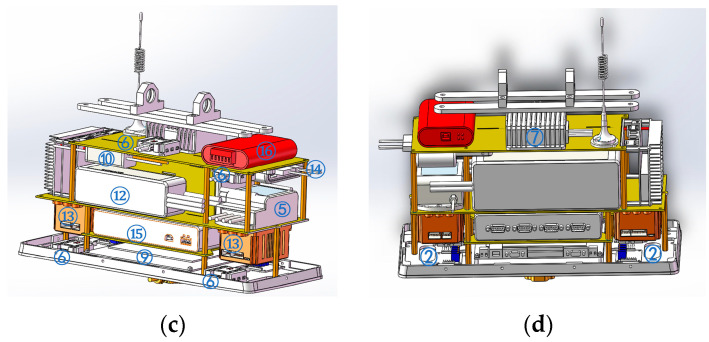
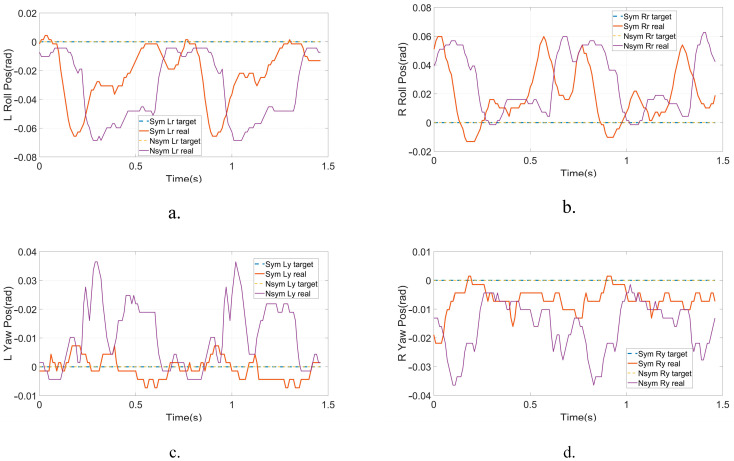
Biped locomotion provides more mobility and effectiveness compared with other methods. Animals have evolved efficient walking patterns that are pursued by biped robot researchers. Current researchers have observed that symmetry is a critical criterion to achieve efficient natural walking and usually realize symmetrical gait patterns through morphological characteristics using simplified dynamic models or artificial priors of the center of mass (CoM). However, few considerations of symmetry and energy consumption are introduced at the joint level, resulting in inefficient leg motion. In this paper, we propose a full-order biped gait planner in which the symmetry requirement, energy efficiency, and trajectory smoothness can all be involved at the joint level, and CoM motion is automatically determined without any morphological prior. In order to achieve a symmetrical and efficient walking pattern, we first investigated the characteristic of a completely symmetrical gait, and a group of nearly linear slacked constraints was designed for three phases of planning. Then a Constrained Direct Collocation (DIRCON)-based full-order biped gait planner with a weighted cost function for energy consumption and trajectory smoothness is proposed. A dynamic simulation with our newly designed robot model was performed in CoppliaSim to test the planner. Physical comparison experiments on a real robot device finally validated the symmetry characteristic and energy efficiency of the generated gait. In addition, a detailed presentation of the real biped robot is also provided.
Keywords: energy efficiency; robotics; symmetrical biped gait planning; trajectory optimization.
Conflict of interest statement
The authors declare no conflict of interest.
Figures











References
-
- Zhang J., Yuan Z., Dong S., Sadiq M.T., Zhang F., Li J. Structural design and kinematics simulation of hydraulic biped robot. Appl. Sci. 2020;10:6377. doi: 10.3390/app10186377. - DOI
-
- Gupta S., Kumar A. A brief review of dynamics and control of underactuated biped robots. Adv. Robot. 2017;31:607–623. doi: 10.1080/01691864.2017.1308270. - DOI
-
- Morisawa M., Kajita S., Kanehiro F., Kaneko K., Miura K., Yokoi K. Balance control based on capture point error compensation for biped walking on uneven terrain; Proceedings of the 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012); Osaka, Japan. 29 November 2012; pp. 734–740.
-
- Alexander R.M. The gaits of bipedal and quadrupedal animals. Int. J. Robot. Res. 1984;3:49–59. doi: 10.1177/027836498400300205. - DOI
LinkOut - more resources
Full Text Sources
