

YOLO-S: A Lightweight and Accurate YOLO-like Network for Small Target Selection in Aerial Imagery
- PMID: 36850465
- PMCID: PMC9962614
- DOI: 10.3390/s23041865
YOLO-S: A Lightweight and Accurate YOLO-like Network for Small Target Selection in Aerial Imagery
Abstract
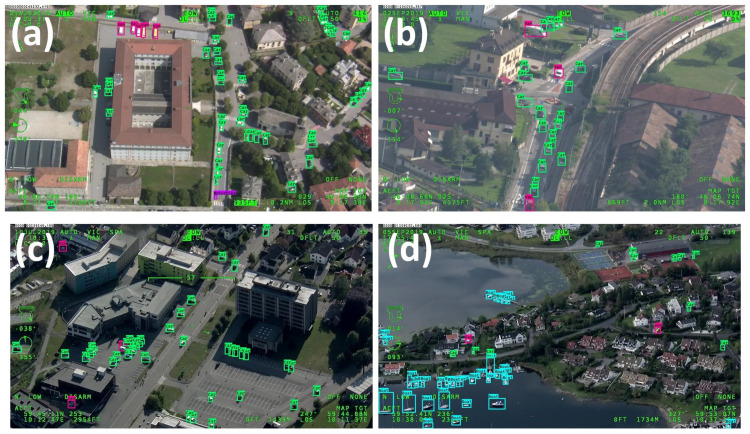
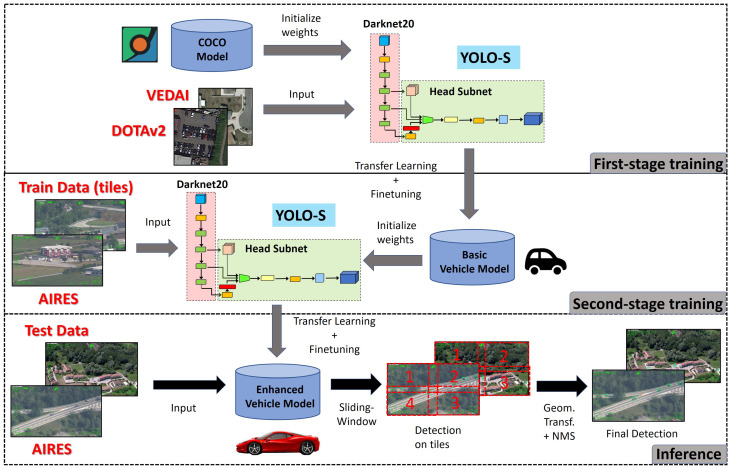
Small target detection is still a challenging task, especially when looking at fast and accurate solutions for mobile or edge applications. In this work, we present YOLO-S, a simple, fast, and efficient network. It exploits a small feature extractor, as well as skip connection, via both bypass and concatenation, and a reshape-passthrough layer to promote feature reuse across network and combine low-level positional information with more meaningful high-level information. Performances are evaluated on AIRES, a novel dataset acquired in Europe, and VEDAI, benchmarking the proposed YOLO-S architecture with four baselines. We also demonstrate that a transitional learning task over a combined dataset based on DOTAv2 and VEDAI can enhance the overall accuracy with respect to more general features transferred from COCO data. YOLO-S is from 25% to 50% faster than YOLOv3 and only 15-25% slower than Tiny-YOLOv3, outperforming also YOLOv3 by a 15% in terms of accuracy (mAP) on the VEDAI dataset. Simulations on SARD dataset also prove its suitability for search and rescue operations. In addition, YOLO-S has roughly 90% of Tiny-YOLOv3's parameters and one half FLOPs of YOLOv3, making possible the deployment for low-power industrial applications.
Keywords: aerial imagery; computer vision; convolutional neural network; feature fusion; reshape pass-through layer; vehicle detection.
Conflict of interest statement
The authors declare no conflict of interest.
Figures







References
-
- Qu T., Zhang Q., Sun S. Vehicle detection from high-resolution aerial images using spatial pyramid pooling-based deep convolutional neural networks. Multimed. Tools Appl. 2017;76:21651–21663. doi: 10.1007/s11042-016-4043-5. - DOI
-
- Ju M., Luo J., Zhang P., He M., Luo H. A Simple and Efficient Network for Small Target Detection. IEEE Access. 2019;7:85771–85781. doi: 10.1109/ACCESS.2019.2924960. - DOI
-
- Sambolek S., Ivasic-Kos M. Automatic Person Detection in Search and Rescue Operations Using Deep CNN Detectors. IEEE Access. 2021;9:37905–37922. doi: 10.1109/ACCESS.2021.3063681. - DOI
-
- Razakarivony S., Jurie F. Vehicle Detection in Aerial Imagery: A small target detection benchmark. J. Vis. Commun. Image Represent. 2016;34:187–203. doi: 10.1016/j.jvcir.2015.11.002. - DOI
LinkOut - more resources
Full Text Sources
