

Weakly Supervised 2D Pose Adaptation and Body Part Segmentation for Concealed Object Detection
- PMID: 36850603
- PMCID: PMC9964725
- DOI: 10.3390/s23042005
Weakly Supervised 2D Pose Adaptation and Body Part Segmentation for Concealed Object Detection
Abstract
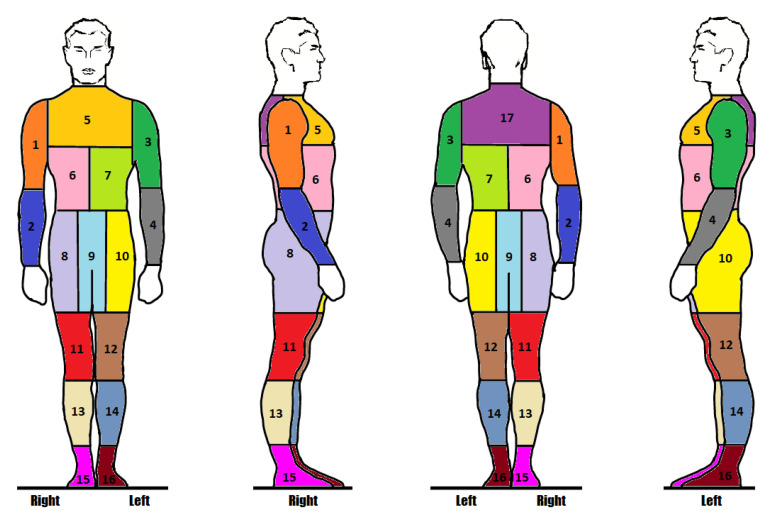
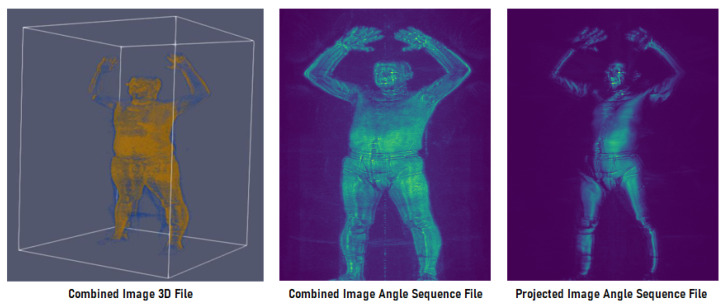
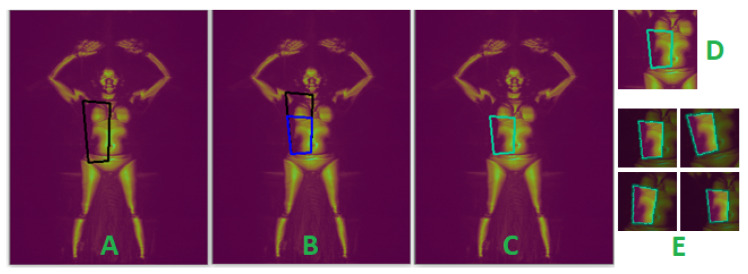
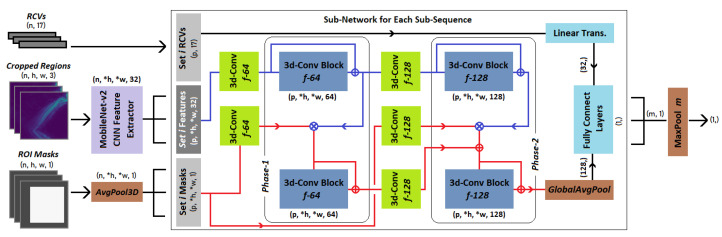
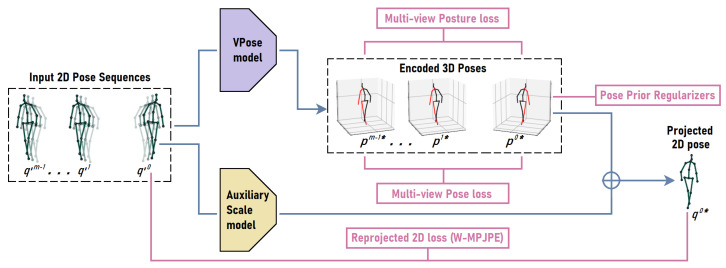
Weakly supervised pose estimation can be used to assist unsupervised body part segmentation and concealed item detection. The accuracy of pose estimation is essential for precise body part segmentation and accurate concealed item detection. In this paper, we show how poses obtained from an RGB pretrained 2D pose detector can be modified for the backscatter image domain. The 2D poses are refined using RANSAC bundle adjustment to minimize the projection loss in 3D. Furthermore, we show how 2D poses can be optimized using a newly proposed 3D-to-2D pose correction network weakly supervised with pose prior regularizers and multi-view pose and posture consistency losses. The optimized 2D poses are used to segment human body parts. We then train a body-part-aware anomaly detection network to detect foreign (concealed threat) objects on segmented body parts. Our work is applied to the TSA passenger screening dataset containing millimeter wave scan images of airport travelers annotated with only binary labels that indicate whether a foreign object is concealed on a body part. Our proposed approach significantly improves the detection accuracy of TSA 2D backscatter images in existing works with a state-of-the-art performance of 97% F1-score, 0.0559 log-loss on the TSA-PSD test-set, and a 74% reduction in 2D pose error.
Keywords: 2D pose correction; anomaly detection; body part recognition; body segmentation; domain adaptation; object detection; pose refinement; threat localization.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Figures





References
-
- Güler R.A., Trigeorgis G., Antonakos E., Snape P., Zafeiriou S., Kokkinos I. DenseReg: Fully Convolutional Dense Shape Regression In-the-Wild; In Proceeding of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); Honolulu, HI, USA. 21–26 July 2017; pp. 2614–2623.
-
- Sun K., Xiao B., Liu D., Wang J. Deep High-Resolution Representation Learning for Human Pose Estimation. arXiv. 20191902.09212
-
- Amadi L., Agam G. 2D-Pose Based Human Body Segmentation for Weakly-Supervised Concealed Object Detection in Backscatter Millimeter-Wave Images; Proceedings of the 26th International Conference of Pattern Recognition Systems (T-CAP @ ICPR 2022); Montreal, QC, Canada. 21–25 August 2022.
-
- Amadi L., Agam G. Multi-view Posture Analysis for Semi-Supervised 3D Monocular Pose Estimation; Proceedings of the CVPR; Vancouver, BC, Canada. 18–22 June 2023.
-
- Amadi L., Agam G. Boosting the Performance of Weakly-Supervised 3D Human Pose Estimators with Pose Prior Regularizers; Proceedings of the ICIP; Bordeaux, France. 16–19 October 2022.
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
