

Decoding behavior from global cerebrovascular activity using neural networks
- PMID: 36864293
- PMCID: PMC9981746
- DOI: 10.1038/s41598-023-30661-5
Decoding behavior from global cerebrovascular activity using neural networks
Abstract
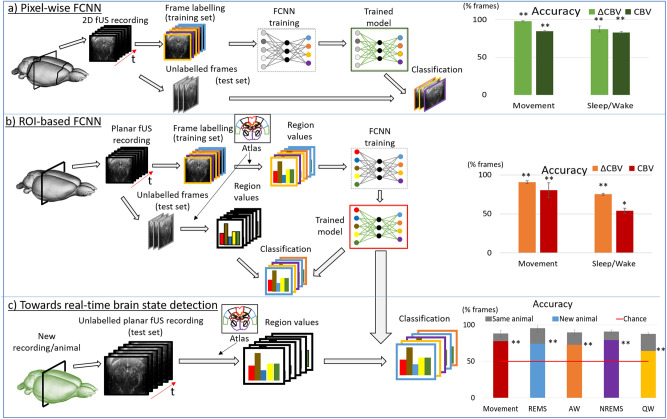
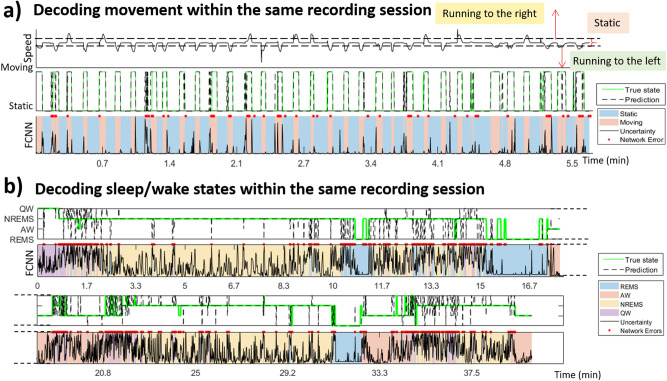
Functional Ultrasound (fUS) provides spatial and temporal frames of the vascular activity in the brain with high resolution and sensitivity in behaving animals. The large amount of resulting data is underused at present due to the lack of appropriate tools to visualize and interpret such signals. Here we show that neural networks can be trained to leverage the richness of information available in fUS datasets to reliably determine behavior, even from a single fUS 2D image after appropriate training. We illustrate the potential of this method with two examples: determining if a rat is moving or static and decoding the animal's sleep/wake state in a neutral environment. We further demonstrate that our method can be transferred to new recordings, possibly in other animals, without additional training, thereby paving the way for real-time decoding of brain activity based on fUS data. Finally, the learned weights of the network in the latent space were analyzed to extract the relative importance of input data to classify behavior, making this a powerful tool for neuroscientific research.
© 2023. The Author(s).
Conflict of interest statement
MT is co-founder and shareholder of Iconeus, an international company commercializing ultrasound neuroimaging scanners. The other authors declare no competing interests.
Figures



References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
