

Assessment of Low-Density Force Myography Armband for Classification of Upper Limb Gestures
- PMID: 36904919
- PMCID: PMC10007530
- DOI: 10.3390/s23052716
Assessment of Low-Density Force Myography Armband for Classification of Upper Limb Gestures
Abstract
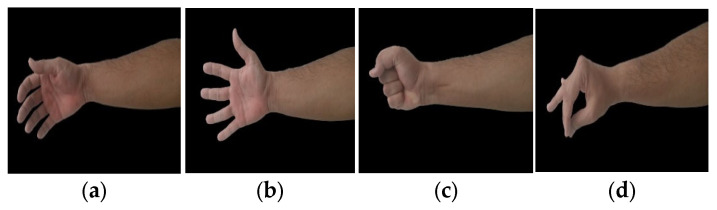
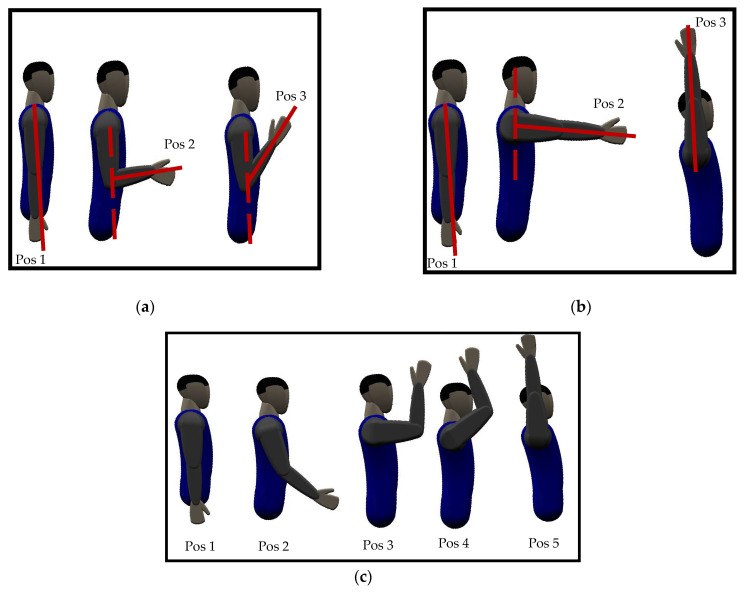
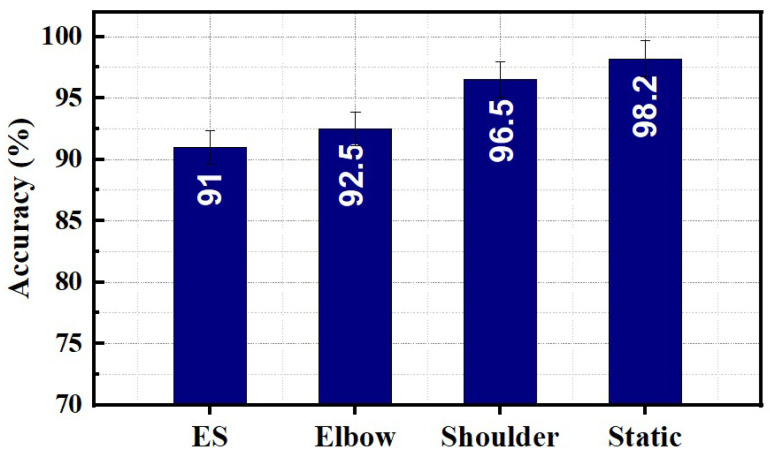
Using force myography (FMG) to monitor volumetric changes in limb muscles is a promising and effective alternative for controlling bio-robotic prosthetic devices. In recent years, there has been a focus on developing new methods to improve the performance of FMG technology in the control of bio-robotic devices. This study aimed to design and evaluate a novel low-density FMG (LD-FMG) armband for controlling upper limb prostheses. The study investigated the number of sensors and sampling rate for the newly developed LD-FMG band. The performance of the band was evaluated by detecting nine gestures of the hand, wrist, and forearm at varying elbow and shoulder positions. Six subjects, including both fit and amputated individuals, participated in this study and completed two experimental protocols: static and dynamic. The static protocol measured volumetric changes in forearm muscles at the fixed elbow and shoulder positions. In contrast, the dynamic protocol included continuous motion of the elbow and shoulder joints. The results showed that the number of sensors significantly impacts gesture prediction accuracy, with the best accuracy achieved on the 7-sensor FMG band arrangement. Compared to the number of sensors, the sampling rate had a lower influence on prediction accuracy. Additionally, variations in limb position greatly affect the classification accuracy of gestures. The static protocol shows an accuracy above 90% when considering nine gestures. Among dynamic results, shoulder movement shows the least classification error compared to elbow and elbow-shoulder (ES) movements.
Keywords: accuracy; dynamic protocol; force myography (FMG); gestures; static protocol.
Conflict of interest statement
The authors declare no conflict of interest.
Figures









References
-
- Biryukova E.V., Yourovskaya V. Advances in the Biomechanics of the Hand and Wrist. Springer; Berlin/Heidelberg, Germany: 1994. A model of human hand dynamics; pp. 107–122.
-
- Puchhammer G.J.M. Michelangelo 03-A versatile hand prosthesis, featuring superb controllability and sophisticated bio mimicry. J. Rehabil. Res. Dev. 2008;8:162–163.
-
- Medynski C., Rattray B. Bebionic prosthetic design; Proceedings of the 2011 MyoElectric Controls/Powered Prosthetics Symposium; Fredericton, NB, Canada. 14–19 August 2011.
-
- Connolly C. Prosthetic hands from touch bionics. Ind. Robot. 2008;35:290–293. doi: 10.1108/01439910810876364. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
