

Caterpillar-inspired soft crawling robot with distributed programmable thermal actuation
- PMID: 36947625
- PMCID: PMC10032605
- DOI: 10.1126/sciadv.adf8014
Caterpillar-inspired soft crawling robot with distributed programmable thermal actuation
Abstract
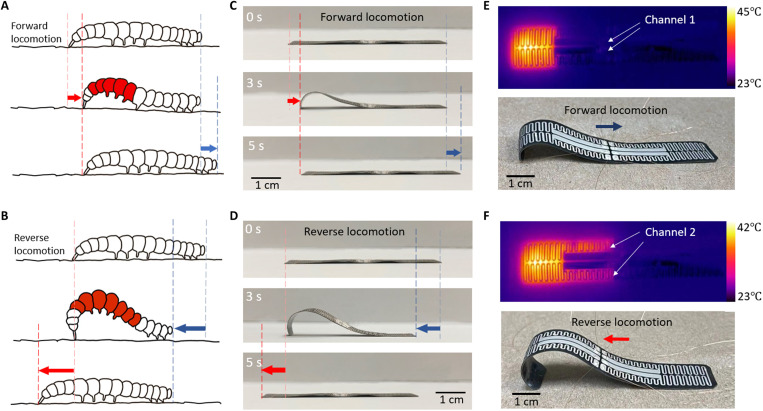
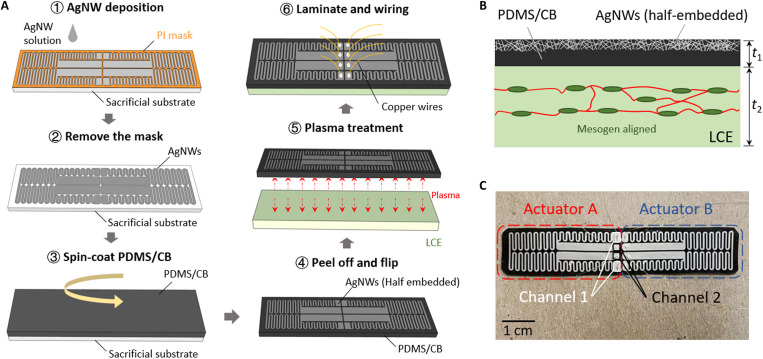
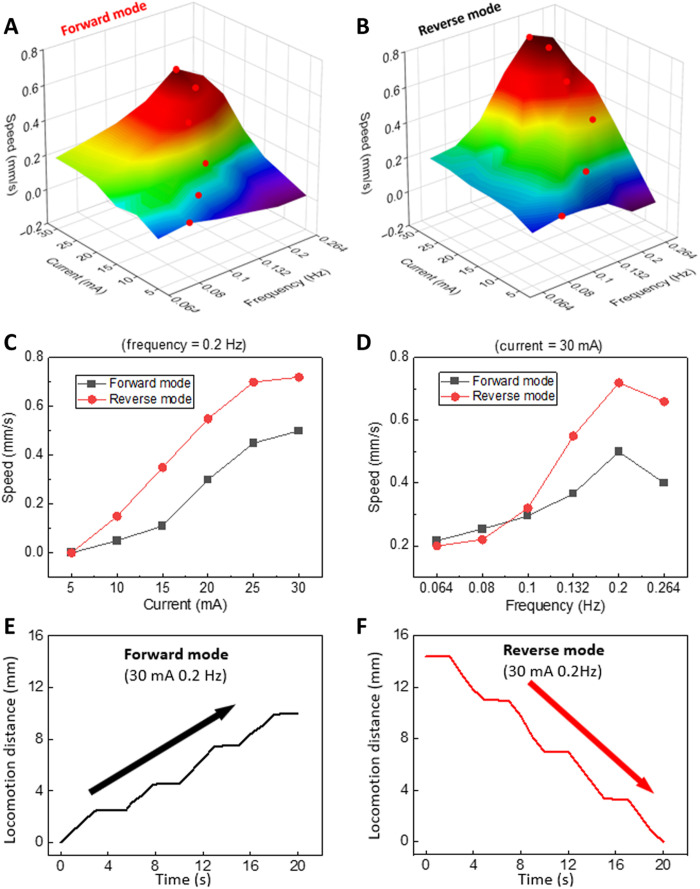
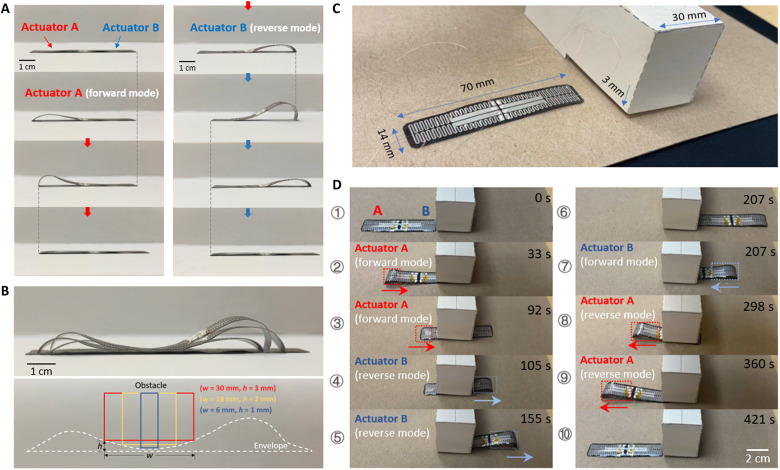
Many inspirations for soft robotics are from the natural world, such as octopuses, snakes, and caterpillars. Here, we report a caterpillar-inspired, energy-efficient crawling robot with multiple crawling modes, enabled by joule heating of a patterned soft heater consisting of silver nanowire networks in a liquid crystal elastomer (LCE)-based thermal bimorph actuator. With patterned and distributed heaters and programmable heating, different temperature and hence curvature distribution along the body of the robot are achieved, enabling bidirectional locomotion as a result of the friction competition between the front and rear end with the ground. The thermal bimorph behavior is studied to predict and optimize the local curvature of the robot under thermal stimuli. The bidirectional actuation modes with the crawling speeds are investigated. The capability of passing through obstacles with limited spacing are demonstrated. The strategy of distributed and programmable heating and actuation with thermal responsive materials offers unprecedented capabilities for smart and multifunctional soft robots.
Figures
References
-
- C. Laschi, M. Cianchetti, B. Mazzolai, L. Margheri, M. Follador, P. Dario, Soft robot arm inspired by the octopus. Adv. Robot. 26, 709–727 (2012).
-
- Y. Cao, Y. Liu, Y. Chen, L. Zhu, Y. Yan, X. Chen, A novel slithering locomotion mechanism for a snake-like soft robot. J. Mech. Phys. Solids 99, 304–320 (2017).
Grants and funding
LinkOut - more resources
Full Text Sources
