

The Computational and Neural Bases of Context-Dependent Learning
- PMID: 36972611
- PMCID: PMC10348919
- DOI: 10.1146/annurev-neuro-092322-100402
The Computational and Neural Bases of Context-Dependent Learning
Abstract
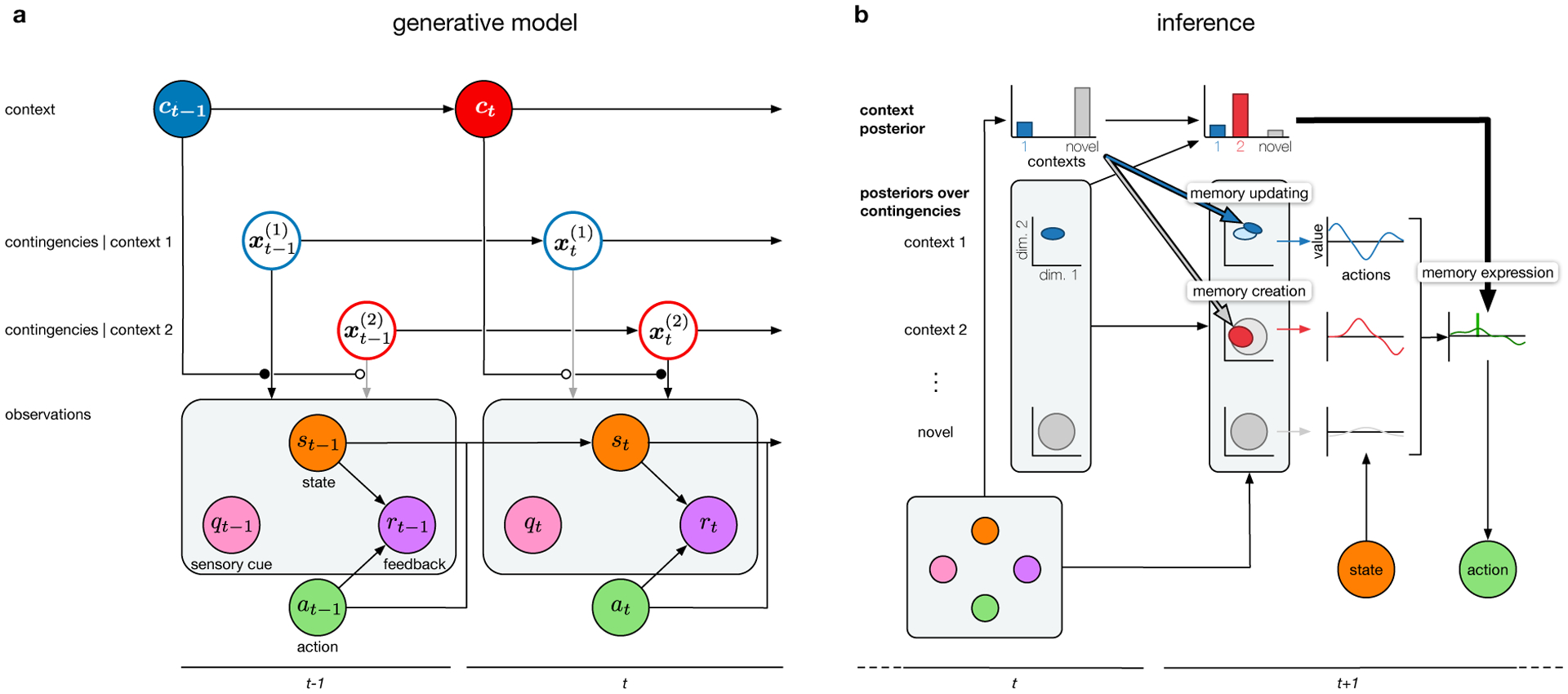
Flexible behavior requires the creation, updating, and expression of memories to depend on context. While the neural underpinnings of each of these processes have been intensively studied, recent advances in computational modeling revealed a key challenge in context-dependent learning that had been largely ignored previously: Under naturalistic conditions, context is typically uncertain, necessitating contextual inference. We review a theoretical approach to formalizing context-dependent learning in the face of contextual uncertainty and the core computations it requires. We show how this approach begins to organize a large body of disparate experimental observations, from multiple levels of brain organization (including circuits, systems, and behavior) and multiple brain regions (most prominently the prefrontal cortex, the hippocampus, and motor cortices), into a coherent framework. We argue that contextual inference may also be key to understanding continual learning in the brain. This theory-driven perspective places contextual inference as a core component of learning.
Keywords: Bayesian inference; context-dependent learning; continual learning; hippocampus; learning; memory; motor cortex; neural computation; prefrontal cortex; thalamus.
Figures

References
-
- Aljundi R, Chakravarty P, Tuytelaars T. 2017. Expert gate: Lifelong learning with a network of experts, In Proc. IEEE Conference on Computer Vision and Pattern Recognition, pp. 3366–3375
-
- Anderson MC, Hulbert JC. 2021. Active forgetting: Adaptation of memory by prefrontal control. Annu. Rev. Psychol 72:1–36 - PubMed
-
- Batsikadze G, Diekmann N, Ernst TM, Klein M, Maderwald S, et al. 2022. The cerebellum contributes to context-effects during fear extinction learning: A 7T fMRI study. Neuroimage 253:119080. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
