

Proprioception gates visual object fixation in flying flies
- PMID: 37001520
- PMCID: PMC10133043
- DOI: 10.1016/j.cub.2023.03.018
Proprioception gates visual object fixation in flying flies
Abstract
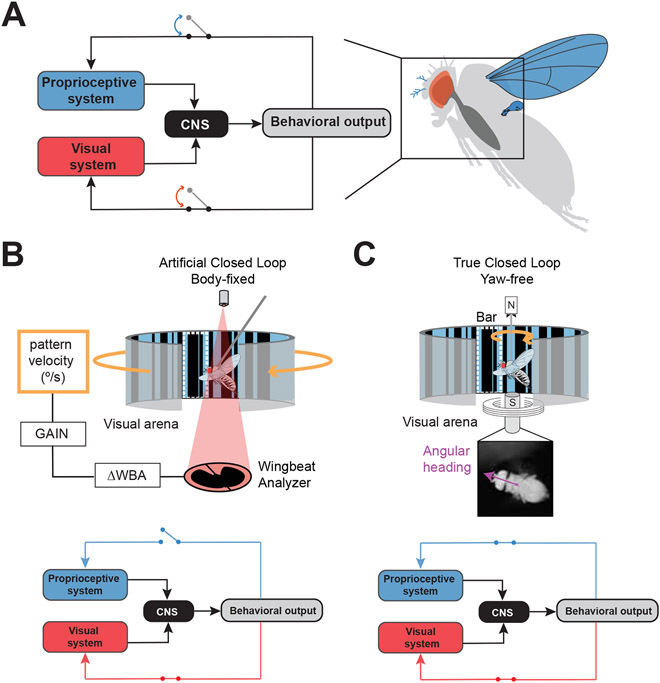
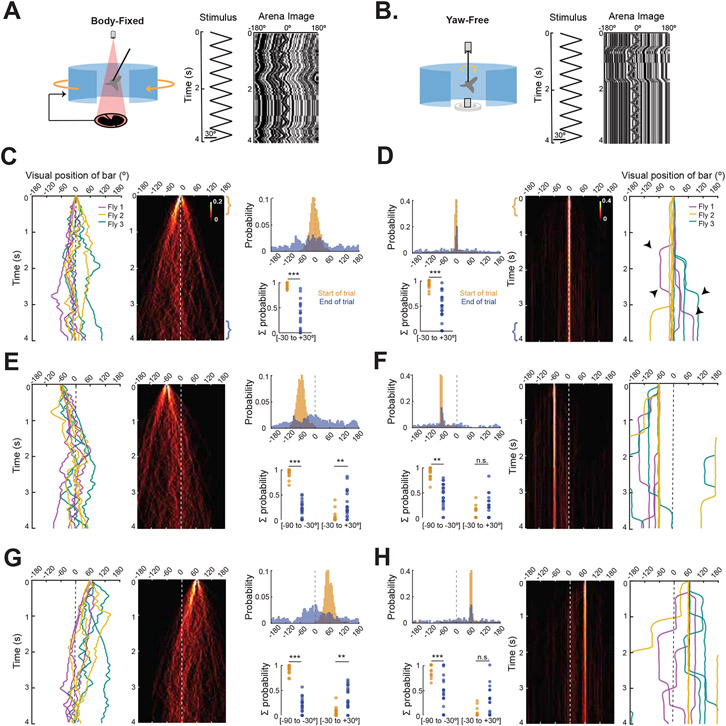
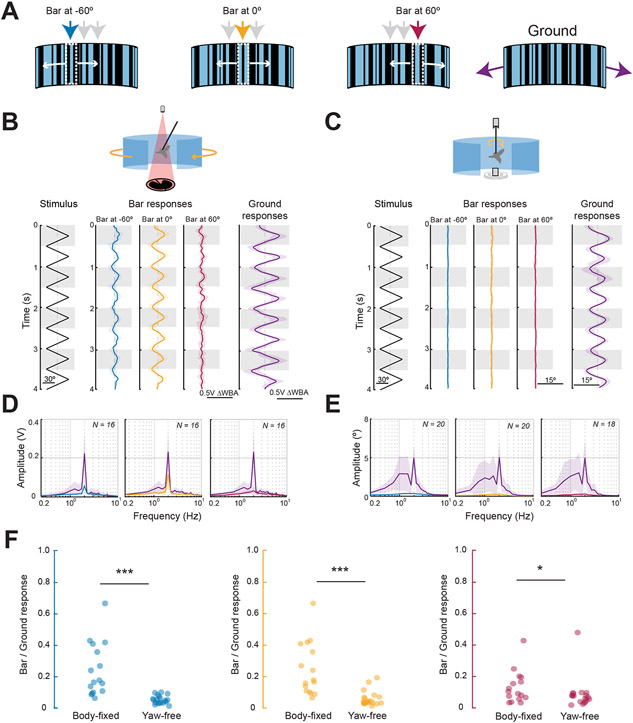
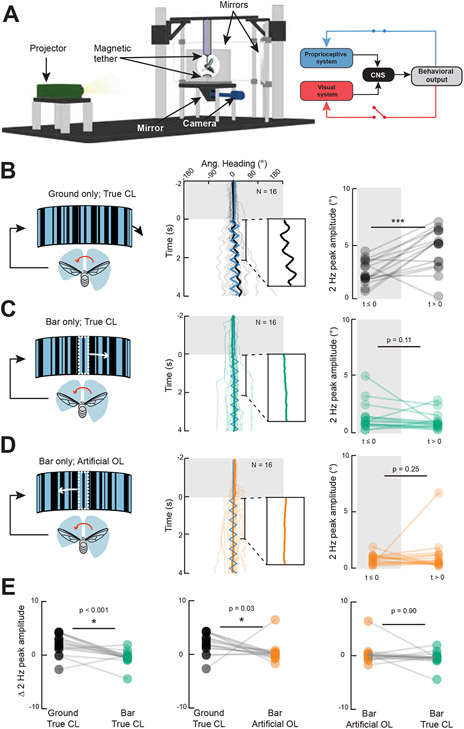
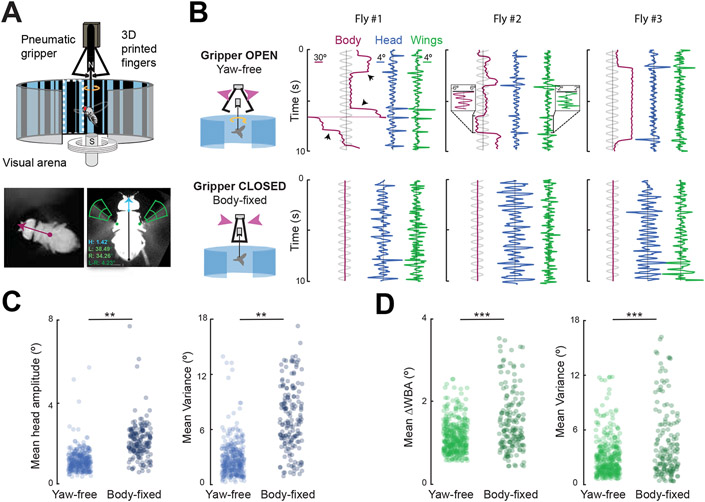
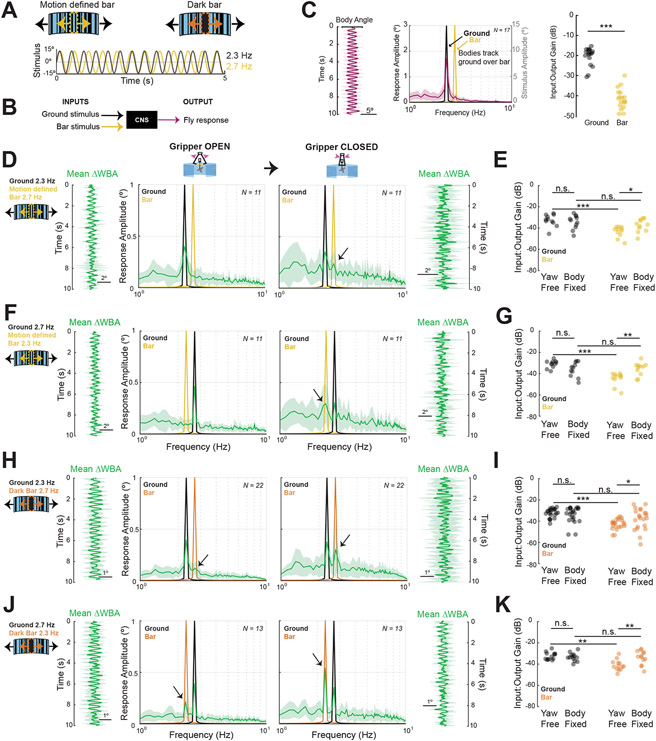
Visual object tracking in animals as diverse as felines, frogs, and fish supports behaviors including predation, predator avoidance, and landscape navigation. Decades of experimental results show that a rigidly body-fixed tethered fly in a "virtual reality" visual flight simulator steers to follow the motion of a vertical bar, thereby "fixating" it on visual midline. This behavior likely reflects a desire to seek natural features such as plant stalks and has inspired algorithms for visual object tracking predicated on robust responses to bar velocity, particularly near visual midline. Using a modified flight simulator equipped with a magnetic pivot to allow frictionless turns about the yaw axis, we discovered that bar fixation as well as smooth steering responses to bar velocity are attenuated or eliminated in yaw-free conditions. Body-fixed Drosophila melanogaster respond to bar oscillation on a stationary ground with frequency-matched wing kinematics and fixate the bar on midline. Yaw-free flies respond to the same stimulus by ignoring the bar and maintaining their original heading. These differences are driven by proprioceptive signals, rather than visual signals, as artificially "clamping" a bar in the periphery of a yaw-free fly has no effect. When presented with a bar and ground oscillating at different frequencies, a yaw-free fly follows the frequency of the ground only, whereas a body-fixed fly robustly steers at the frequencies of both the bar and ground. Our findings support a model in which proprioceptive feedback promote active damping of high-gain optomotor responses to object motion.
Keywords: feature detection; fly vision; navigation; optomotor.
Copyright © 2023 The Author(s). Published by Elsevier Inc. All rights reserved.
Conflict of interest statement
Declaration of interests The authors declare no competing interests.
Figures
Similar articles
-
Divergent visual ecology of Drosophila species drives object-tracking strategies matched to landscape sparsity.Curr Biol. 2024 Oct 21;34(20):4743-4755.e3. doi: 10.1016/j.cub.2024.08.036. Epub 2024 Sep 17. Curr Biol. 2024. PMID: 39293439
-
Drosophila flying in augmented reality reveals the vision-based control autonomy of the optomotor response.Curr Biol. 2024 Jan 8;34(1):68-78.e4. doi: 10.1016/j.cub.2023.11.045. Epub 2023 Dec 18. Curr Biol. 2024. PMID: 38113890
-
A deep learning analysis of Drosophila body kinematics during magnetically tethered flight.J Neurogenet. 2023 Mar-Dec;37(1-2):47-56. doi: 10.1080/01677063.2023.2210682. Epub 2023 May 18. J Neurogenet. 2023. PMID: 37200153
-
Behavioral neurobiology: a vibrating gyroscope controls fly steering maneuvers.Curr Biol. 2007 Feb 20;17(4):R134-6. doi: 10.1016/j.cub.2006.12.021. Curr Biol. 2007. PMID: 17307048 Review.
-
Neural control and precision of flight muscle activation in Drosophila.J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2017 Jan;203(1):1-14. doi: 10.1007/s00359-016-1133-9. Epub 2016 Dec 9. J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2017. PMID: 27942807 Free PMC article. Review.
Cited by
-
Fantastic beasts and how to study them: rethinking experimental animal behavior.J Exp Biol. 2024 Feb 15;227(4):jeb247003. doi: 10.1242/jeb.247003. Epub 2024 Feb 19. J Exp Biol. 2024. PMID: 38372042 Free PMC article.
-
Multisensory integration in Anopheles mosquito swarms: The role of visual and acoustic information in mate tracking and collision avoidance.bioRxiv [Preprint]. 2024 May 13:2024.04.18.590128. doi: 10.1101/2024.04.18.590128. bioRxiv. 2024. PMID: 38712209 Free PMC article. Preprint.
-
Drosophila require both green and UV wavelengths for sun orientation but lack a time-compensated sun compass.J Exp Biol. 2024 Oct 1;227(19):jeb246817. doi: 10.1242/jeb.246817. Epub 2024 Oct 14. J Exp Biol. 2024. PMID: 39397575 Free PMC article.
-
Moving in an Uncertain World: Robust and Adaptive Control of Locomotion from Organisms to Machine Intelligence.Integr Comp Biol. 2024 Nov 21;64(5):1390-1407. doi: 10.1093/icb/icae121. Integr Comp Biol. 2024. PMID: 39090982 Free PMC article. Review.
-
Bilateral interactions of optic-flow sensitive neurons coordinate course control in flies.Nat Commun. 2024 Oct 12;15(1):8830. doi: 10.1038/s41467-024-53173-w. Nat Commun. 2024. PMID: 39396050 Free PMC article.
References
-
- Reichardt W, and Wenking H (1969). Optical detection and fixation of objects by fixed flying flies. Naturwissenschaften, 424. - PubMed
-
- Poggio T, and Reichardt W (1973). A theory of the pattern induced flight orientation of the fly Musca domestica. Kybernetik, 185–203. - PubMed
-
- Reichardt W, Poggio T, and Hausen K (1983). Figure -ground discrimination by relative movement in the visual system of the fly. Biol. Cybern 46, 1–30.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Molecular Biology Databases
