

Design, Control, and Experimental Evaluation of A Novel Robotic Glove System for Patients with Brachial Plexus Injuries
- PMID: 37035529
- PMCID: PMC10079272
- DOI: 10.1109/tro.2022.3220973
Design, Control, and Experimental Evaluation of A Novel Robotic Glove System for Patients with Brachial Plexus Injuries
Abstract
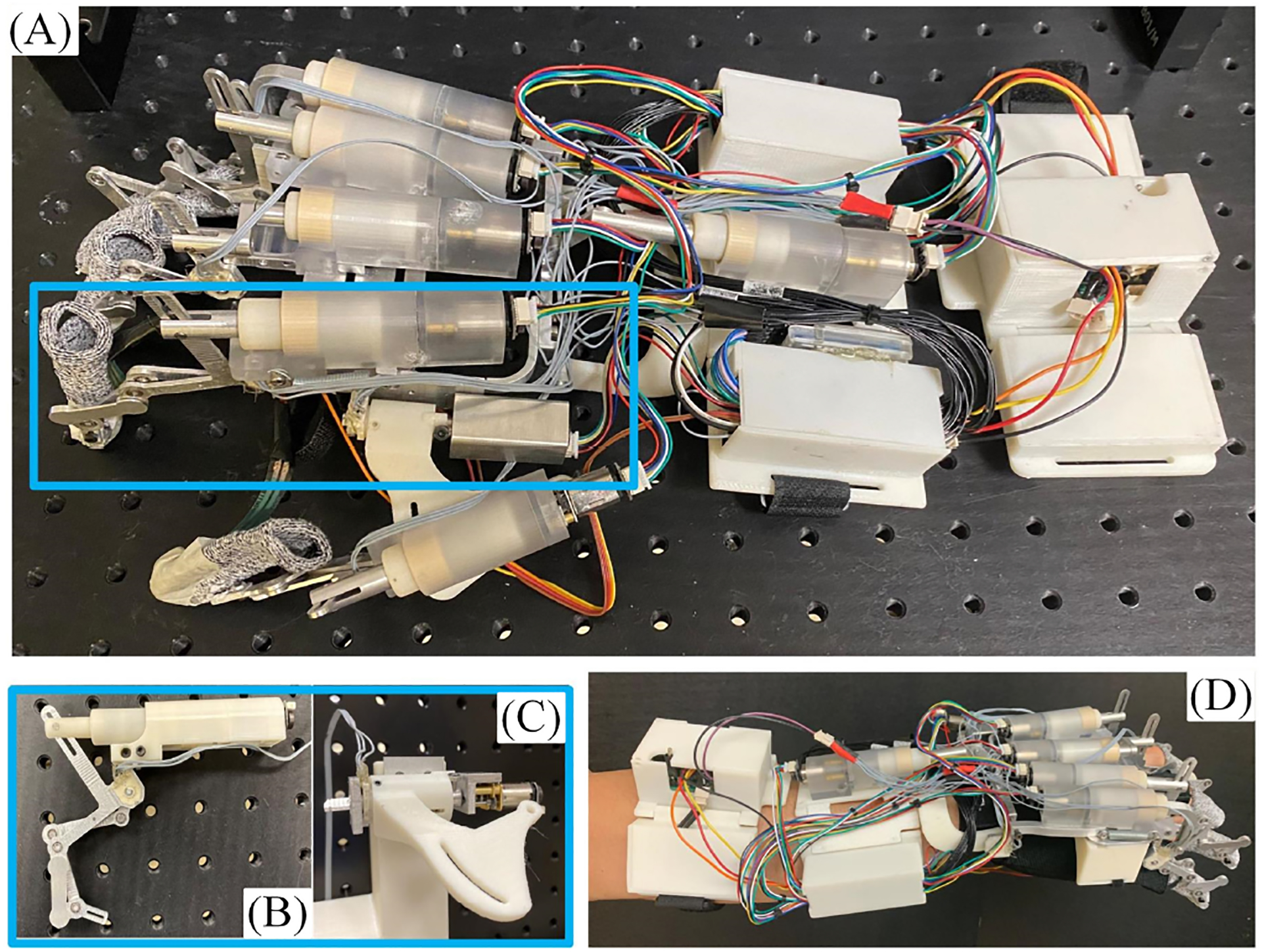
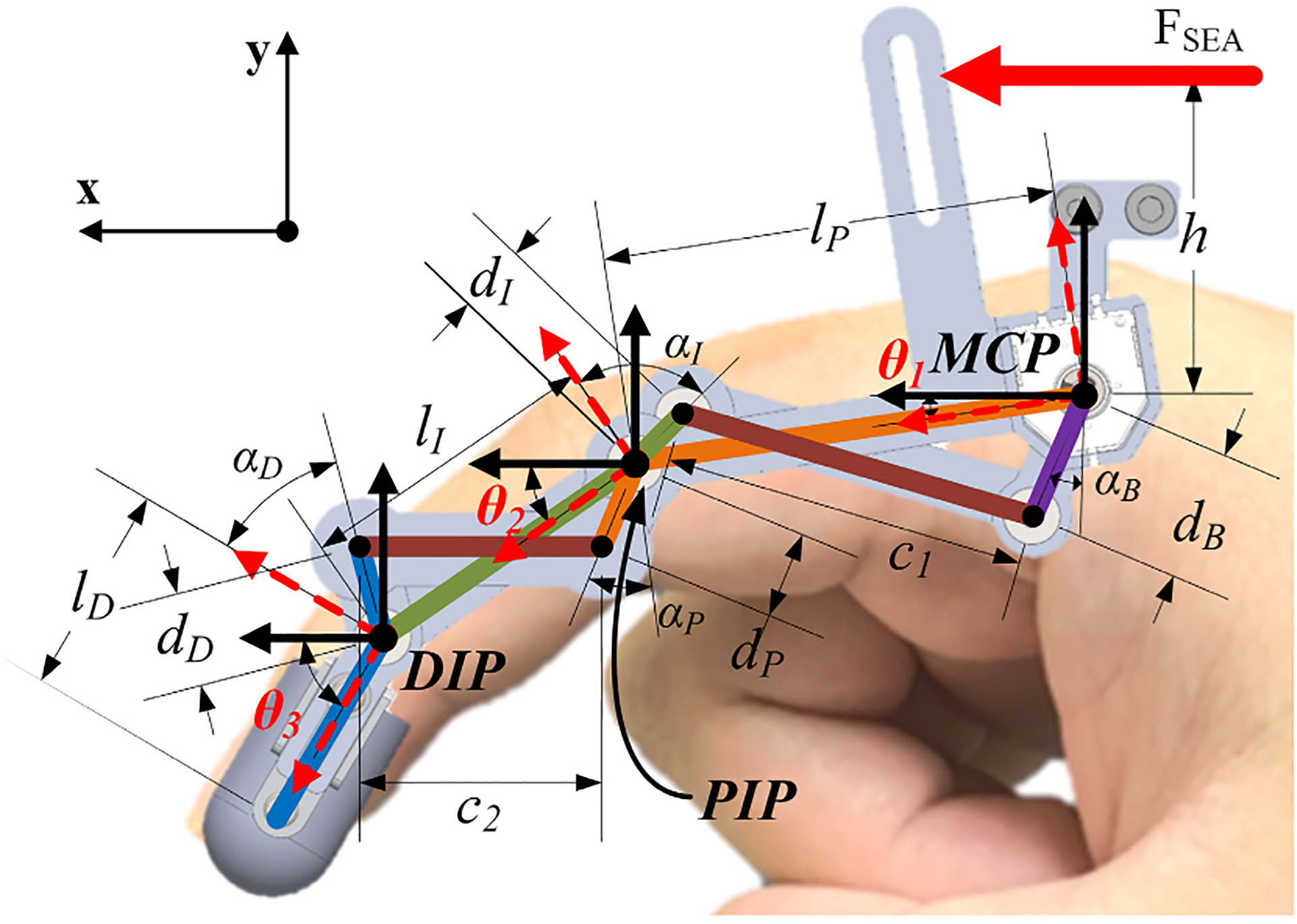
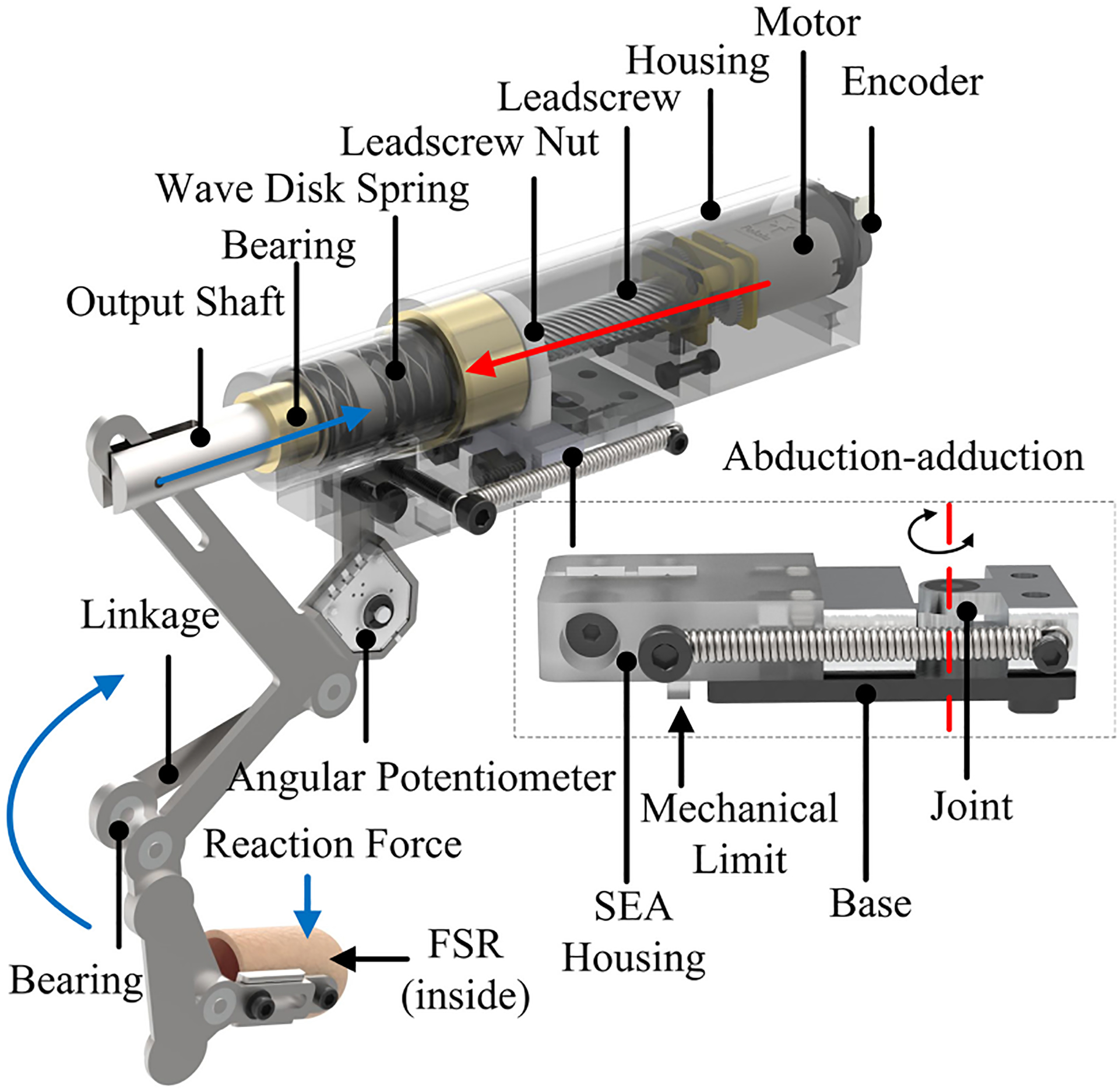
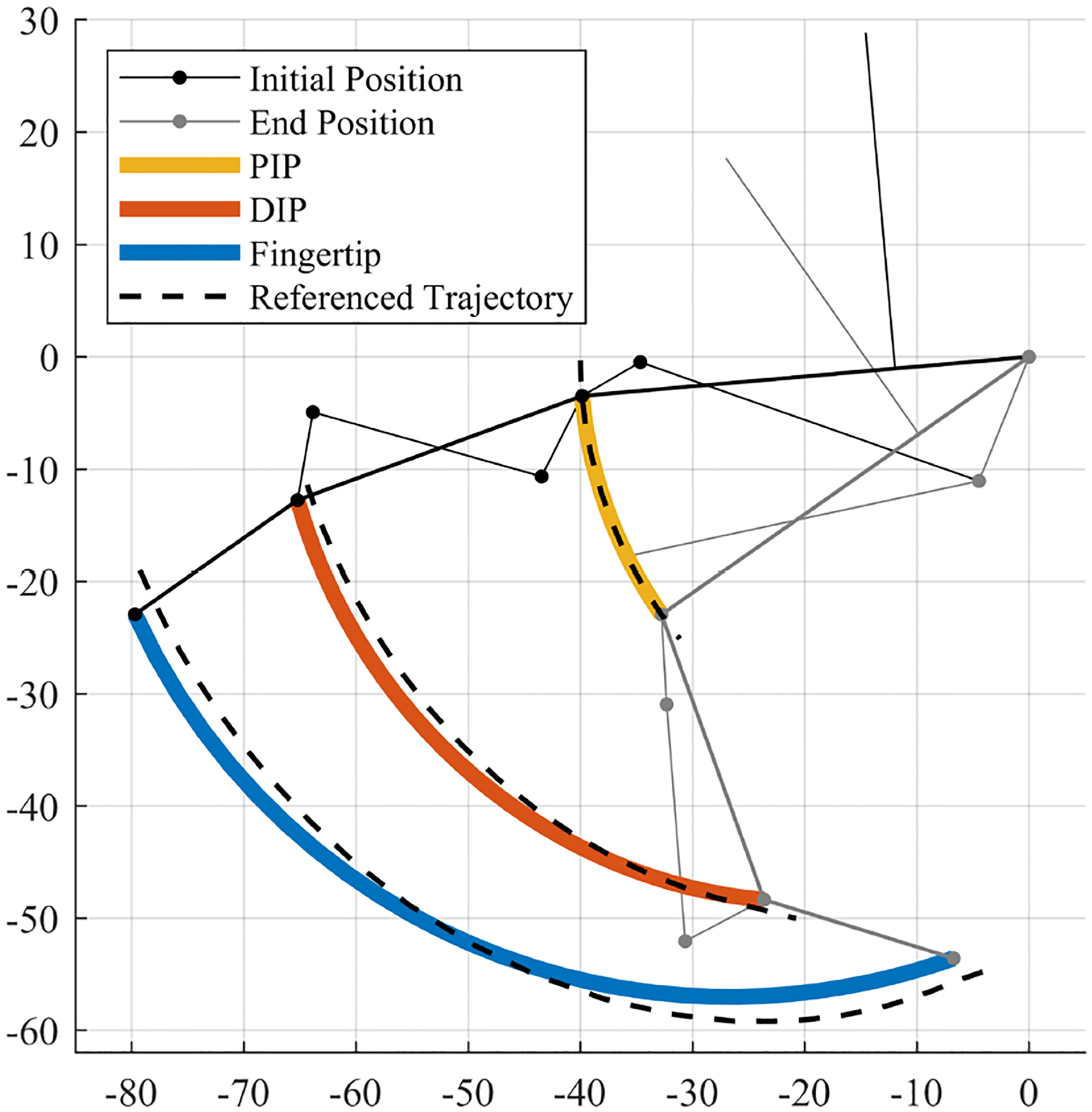
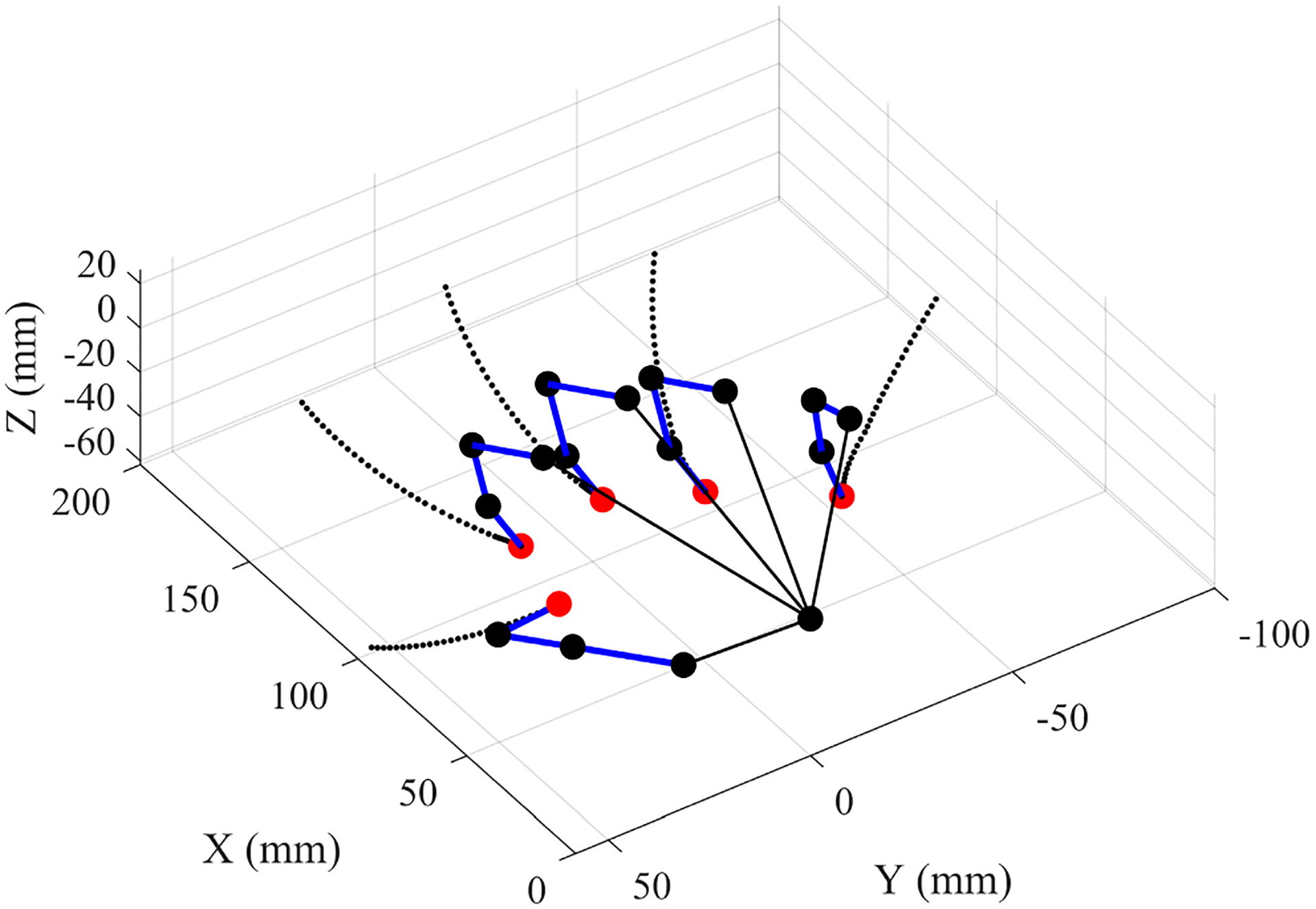
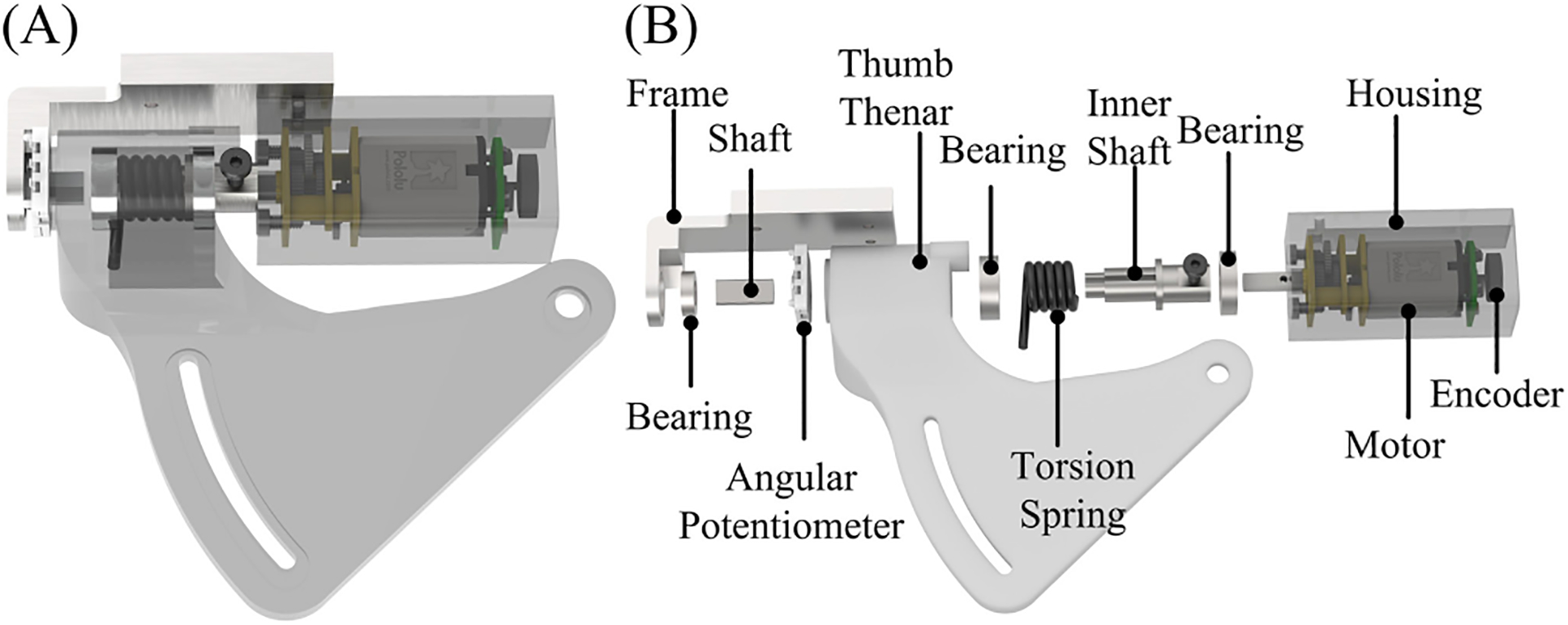
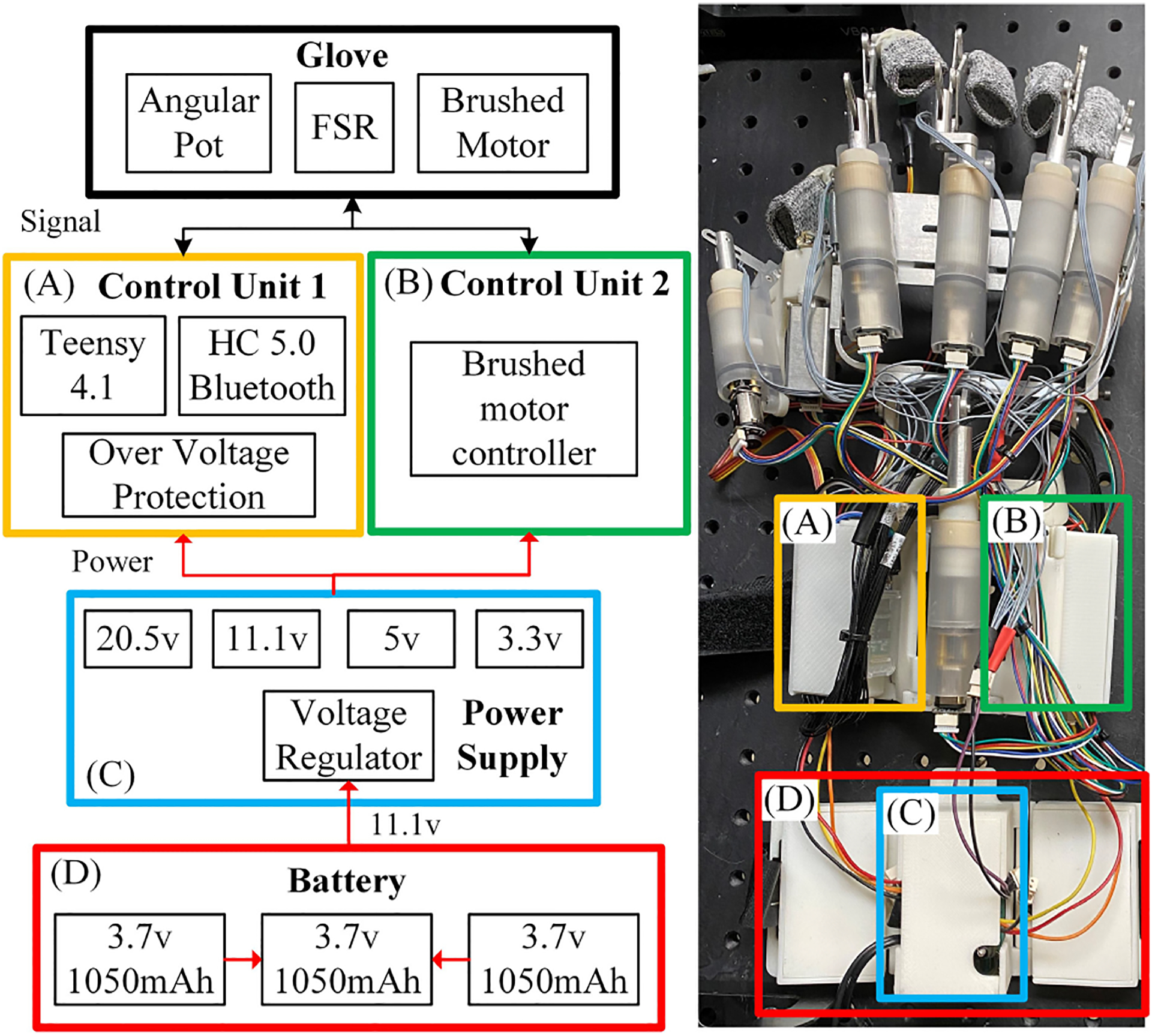
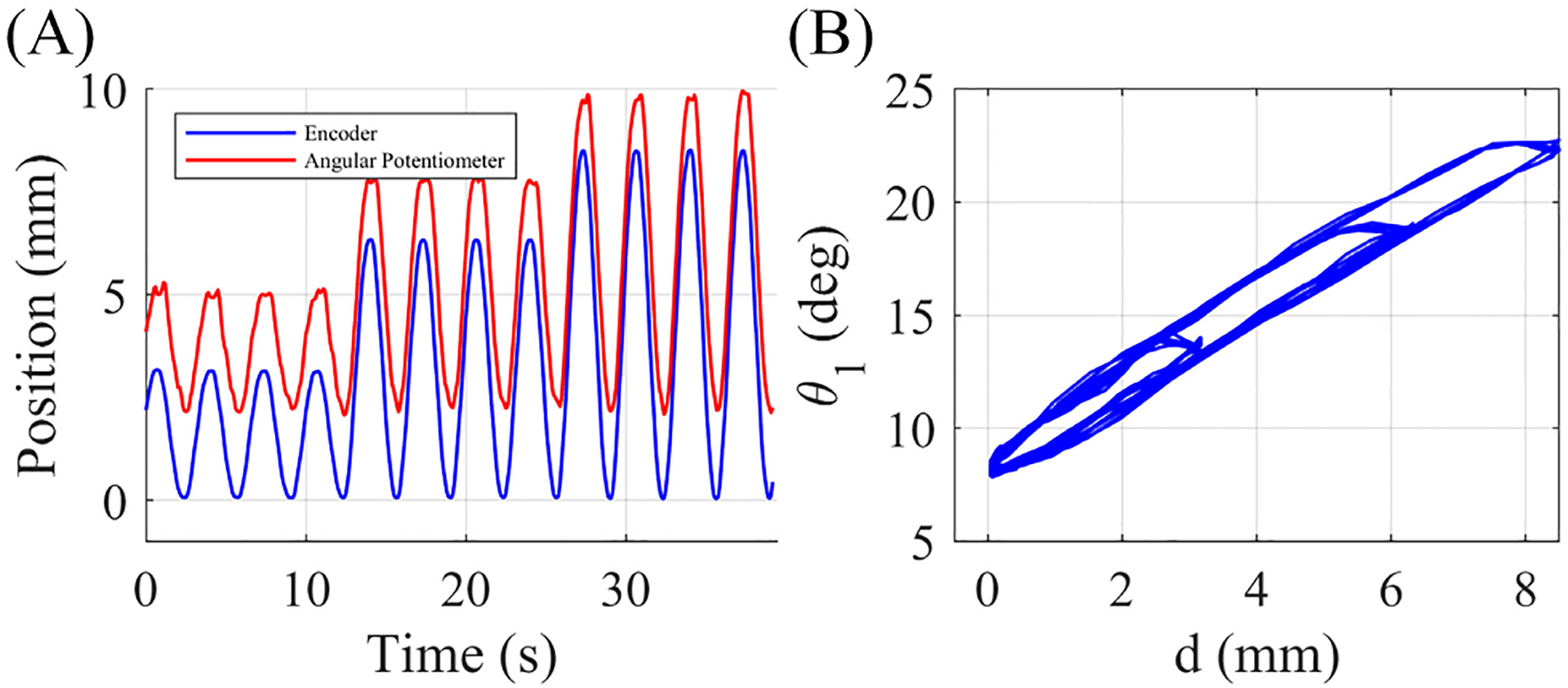
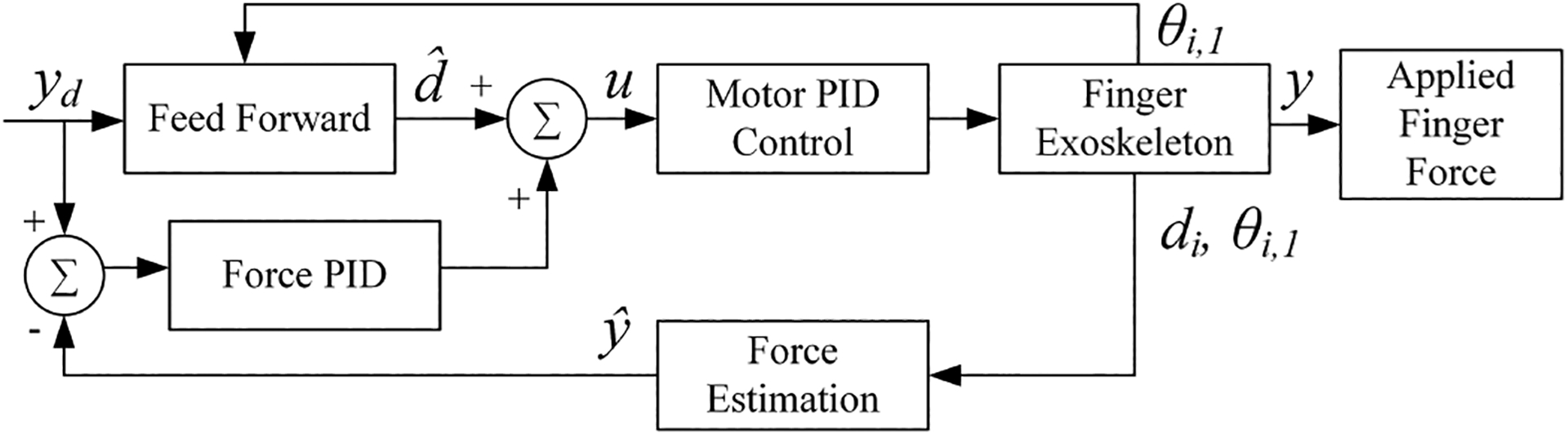
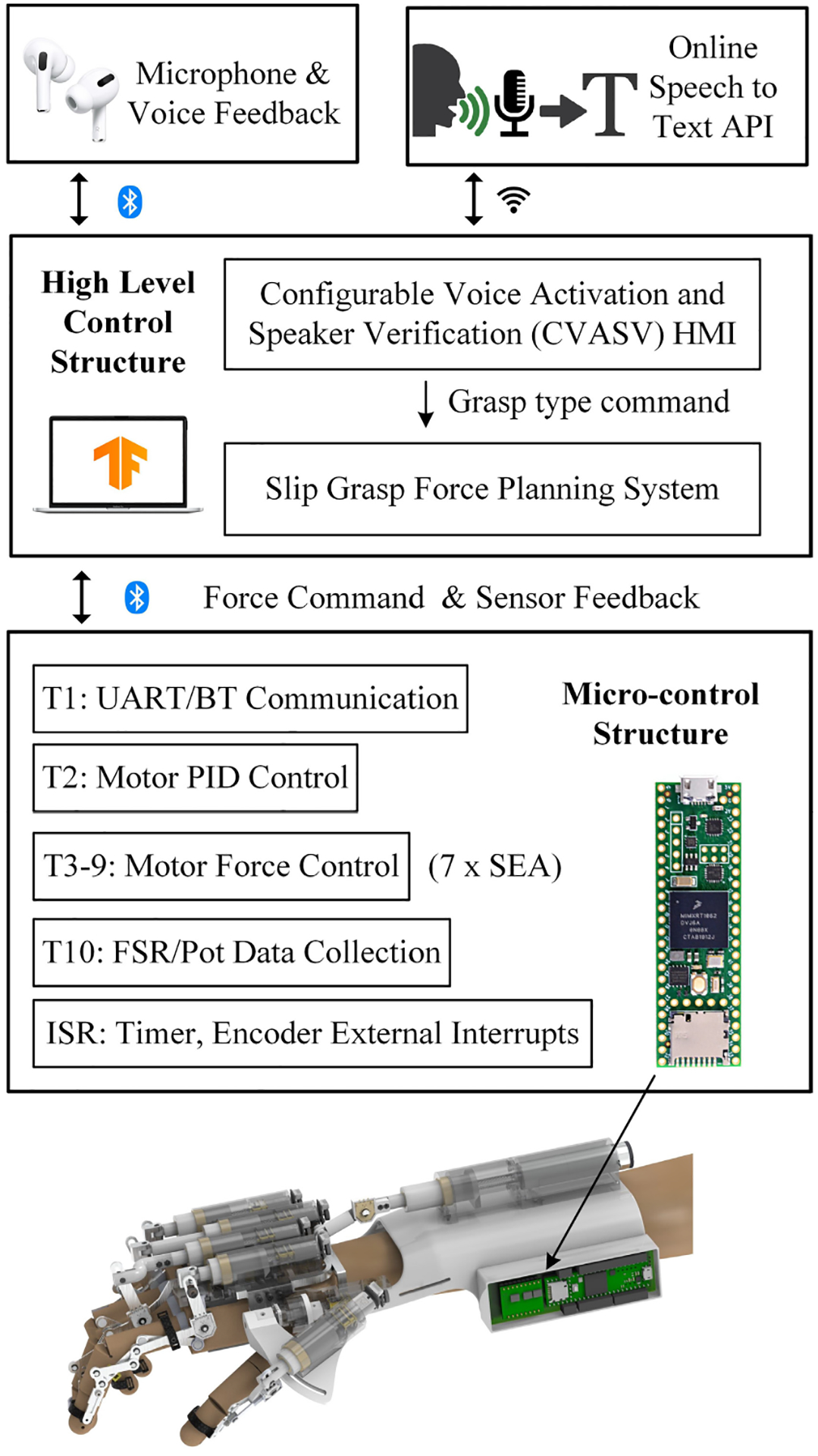
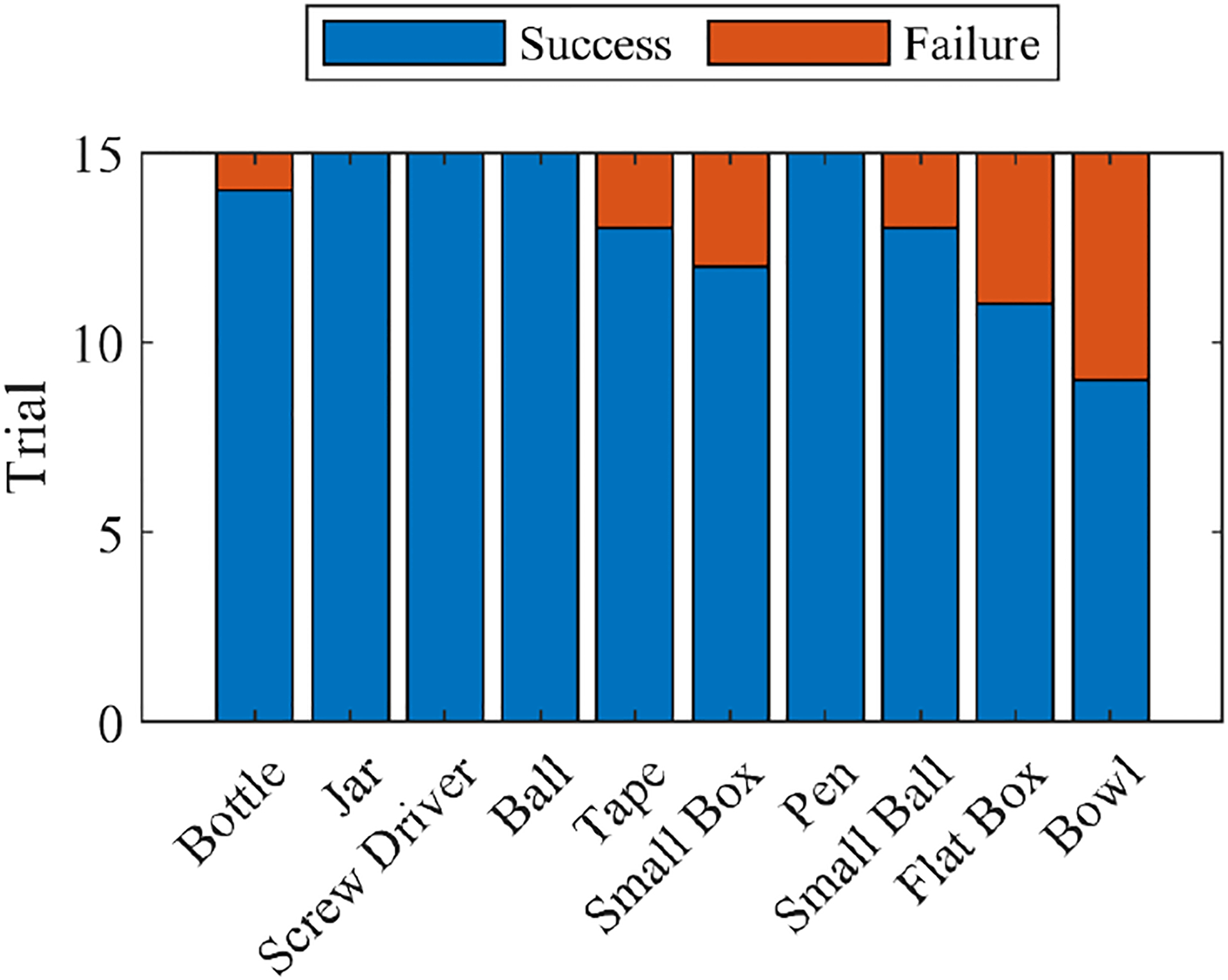
This paper presents the development of an exoskeleton glove system for people who suffer from brachial plexus injuries, aiming to assist their lost grasping functionality. The robotic system consists of a portable glove system and an embedded controller. The glove system consists of Linear Series Elastic Actuators (LSEA), Rotary Series Elastic Actuators (RSEA), and optimized finger linkages to provide imitated human motion to each finger and a coupled motion of the hand. The design principles and optimization strategies were investigated to balance functionality, portability, and stability. The model-based force control strategy compensated with a backlash model and model-free force control strategy are presented and compared. Results show that our proposed model-free control method achieves the goal of accurate force control. Finally, experiments were conducted with the prototype of the developed integrated exoskeleton glove system. Results from 3 subjects with 150 trials show that our proposed exoskeleton glove system has the potential to be used as a rehabilitation device for patients.
Keywords: Exoskeleton Glove; grasp assistance; series elastic actuator; wearable robotics.
Figures
Similar articles
-
Development and Experimental Evaluation of a Novel Portable Haptic Robotic Exoskeleton Glove System for Patients with Brachial Plexus Injuries.Rep U S. 2022 Oct;2022:11115-11120. doi: 10.1109/iros47612.2022.9981468. Epub 2022 Dec 26. Rep U S. 2022. PMID: 37303849 Free PMC article.
-
A NOVEL DESIGN OF A ROBOTIC GLOVE SYSTEM FOR PATIENTS WITH BRACHIAL PLEXUS INJURIES.Proc ASME Des Eng Tech Conf. 2020 Aug;10:V010T10A042. doi: 10.1115/detc2020-22348. Epub 2020 Nov 3. Proc ASME Des Eng Tech Conf. 2020. PMID: 36479635 Free PMC article.
-
Development of a Novel Low-profile Robotic Exoskeleton Glove for Patients with Brachial Plexus Injuries.Rep U S. 2022 Oct;2022:11121-11126. doi: 10.1109/iros47612.2022.9981124. Epub 2022 Dec 26. Rep U S. 2022. PMID: 37293247 Free PMC article.
-
A SERIES ELASTIC ACTUATOR DESIGN AND CONTROL IN A LINKAGE BASED HAND EXOSKELETON.Proc ASME Dyn Syst Control Conf. 2019 Oct;2019(3):10.1115/DSCC2019-8996. doi: 10.1115/DSCC2019-8996. Epub 2019 Nov 26. Proc ASME Dyn Syst Control Conf. 2019. PMID: 32030310 Free PMC article.
-
Stable Grasp Control With a Robotic Exoskeleton Glove.J Mech Robot. 2020 Dec 1;12(6):061015. doi: 10.1115/1.4047724. Epub 2020 Jul 28. J Mech Robot. 2020. PMID: 34168720 Free PMC article.
Cited by
-
Combining soft robotics and telerehabilitation for improving motor function after stroke.Wearable Technol. 2024 Jan 26;5:e1. doi: 10.1017/wtc.2023.26. eCollection 2024. Wearable Technol. 2024. PMID: 38510985 Free PMC article.
-
Enhancing Grasping Function with a Thermoresponsive Ionogel Adhesive Glove for Patients with Rheumatic Diseases.Adv Sci (Weinh). 2025 Jul;12(26):e2414761. doi: 10.1002/advs.202414761. Epub 2025 Mar 26. Adv Sci (Weinh). 2025. PMID: 40140959 Free PMC article.
References
-
- Brault MW, Americans with disabilities: 2010. US Department of Commerce, Economics and Statistics Administration, US, 2012.
-
- Midha R, “Epidemiology of Brachial Plexus Injuries in a Multitrauma Population,” Neurosurgery, no. June, pp. 1182–1189, 1997. - PubMed
-
- Park HR, Lee GS, Kim IS, and Chang J-C, “Brachial Plexus Injury in Adults,” The Nerve, vol. 3, no. 1, pp. 1–11, 2017.
-
- Giuffre JL, Kakar S, Bishop AT, Spinner RJ, and Shin AY, “Current Concepts of the Treatment of Adult Brachial Plexus Injuries,” Journal of Hand Surgery, vol. 35, no. 4, pp. 678–688, 4 2010. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources