

Seamless and intuitive control of a powered prosthetic leg using deep neural network for transfemoral amputees
- PMID: 37041885
- PMCID: PMC10085575
- DOI: 10.1017/wtc.2022.19
Seamless and intuitive control of a powered prosthetic leg using deep neural network for transfemoral amputees
Abstract
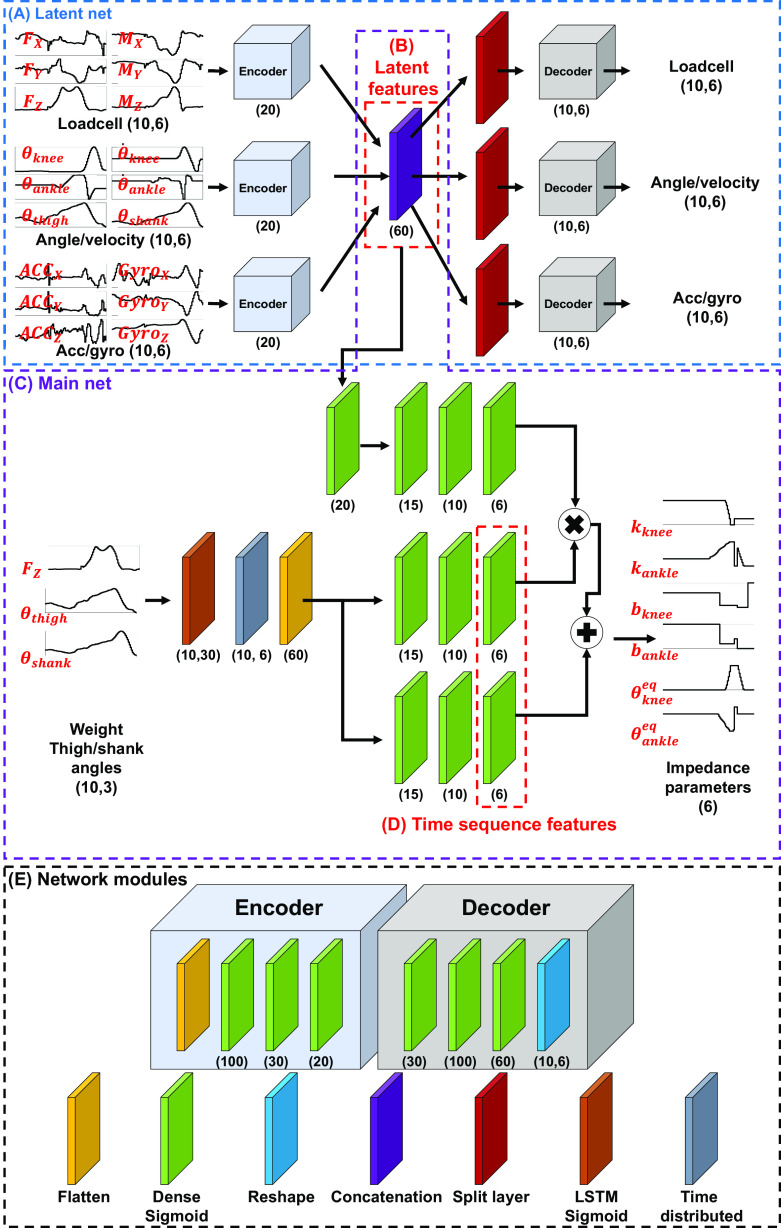
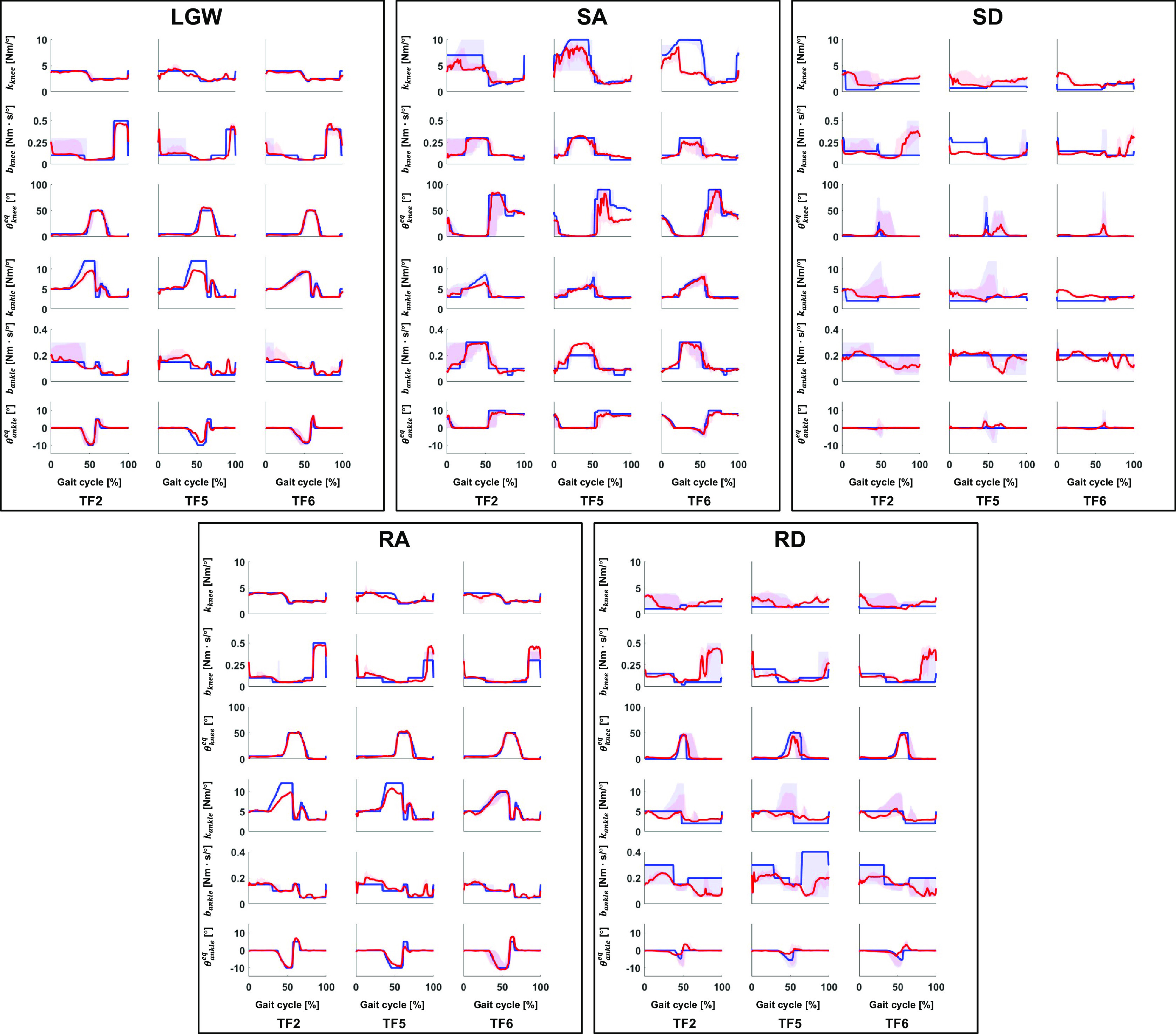
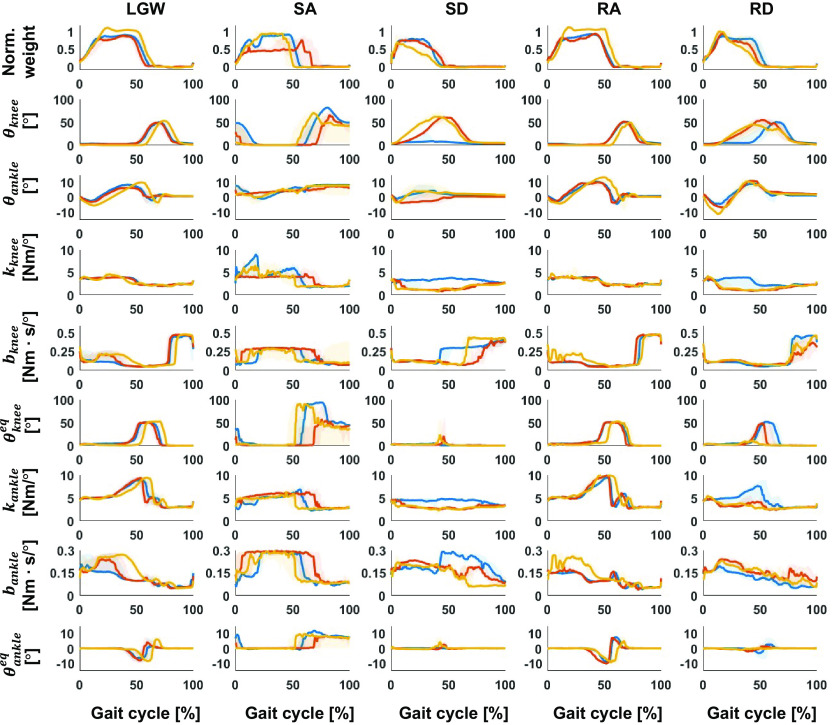
Powered prosthetic legs are becoming a promising option for amputee patients. However, developing safe, robust, and intuitive control strategies for powered legs remains one of the greatest challenges. Although a variety of control strategies have been proposed, creating and fine-tuning the system parameters is time-intensive and complicated when more activities need to be restored. In this study, we developed a deep neural network (DNN) model that facilitates seamless and intuitive gait generation and transitions across five ambulation modes: level-ground walking, ascending/descending ramps, and ascending/descending stairs. The combination of latent and time sequence features generated the desired impedance parameters within the ambulation modes and allowed seamless transitions between ambulation modes. The model was applied to the open-source bionic leg and tested on unilateral transfemoral users. It achieved the overall coefficient of determination of 0.72 with the state machine-based impedance parameters in the offline testing session. In addition, users were able to perform in-laboratory ambulation modes with an overall success rate of 96% during the online testing session. The results indicate that the DNN model is a promising candidate for subject-independent and tuning-free prosthetic leg control for transfemoral amputees.
Keywords: ambulation modes; an open-source bionic leg; deep learning; impedance control; prosthetics.
Conflict of interest statement
The authors declare no competing interests exist.
Figures






Similar articles
-
Ambulation Mode Classification of Individuals with Transfemoral Amputation through A-Mode Sonomyography and Convolutional Neural Networks.Sensors (Basel). 2022 Dec 1;22(23):9350. doi: 10.3390/s22239350. Sensors (Basel). 2022. PMID: 36502055 Free PMC article.
-
Deep-Learning to Map a Benchmark Dataset of Non-amputee Ambulation for Controlling an Open Source Bionic Leg.IEEE Robot Autom Lett. 2022 Oct;7(4):10597-10604. doi: 10.1109/lra.2022.3194323. Epub 2022 Jul 27. IEEE Robot Autom Lett. 2022. PMID: 36923993 Free PMC article.
-
Transfemoral amputee intact limb loading and compensatory gait mechanics during down slope ambulation and the effect of prosthetic knee mechanisms.Clin Biomech (Bristol). 2018 Jun;55:65-72. doi: 10.1016/j.clinbiomech.2018.04.007. Epub 2018 Apr 12. Clin Biomech (Bristol). 2018. PMID: 29698851
-
Design, Kinematics and Gait Analysis, of Prosthetic Knee Joints: A Systematic Review.Bioengineering (Basel). 2023 Jun 27;10(7):773. doi: 10.3390/bioengineering10070773. Bioengineering (Basel). 2023. PMID: 37508800 Free PMC article. Review.
-
Benefits of the Genium microprocessor controlled prosthetic knee on ambulation, mobility, activities of daily living and quality of life: a systematic literature review.Disabil Rehabil Assist Technol. 2021 Jul;16(5):453-464. doi: 10.1080/17483107.2019.1648570. Epub 2019 Aug 30. Disabil Rehabil Assist Technol. 2021. PMID: 31469023
Cited by
-
A Deep Learning Framework for End-to-End Control of Powered Prostheses.IEEE Robot Autom Lett. 2024 May;9(5):3988-3994. doi: 10.1109/lra.2024.3374189. Epub 2024 Mar 6. IEEE Robot Autom Lett. 2024. PMID: 40012860 Free PMC article.
-
Enhancing Robot Transparency in Human-Robot Prosthesis Interaction to Mitigate Terrain Misrecognition Error.IEEE Trans Med Robot Bionics. 2025 May;7(2):734-742. doi: 10.1109/tmrb.2025.3552924. Epub 2025 Mar 19. IEEE Trans Med Robot Bionics. 2025. PMID: 40880672
-
Controlling Powered Prosthesis Kinematics Over Continuous Inter-Leg Transitions Between Walking and Stair Ascent/Descent.IEEE Trans Neural Syst Rehabil Eng. 2024;32:3891-3901. doi: 10.1109/TNSRE.2024.3485643. Epub 2024 Nov 5. IEEE Trans Neural Syst Rehabil Eng. 2024. PMID: 39446547 Free PMC article.
-
Data-efficient human walking speed intent identification.Wearable Technol. 2023 Jul 3;4:e19. doi: 10.1017/wtc.2023.15. eCollection 2023. Wearable Technol. 2023. PMID: 38487770 Free PMC article.
-
A gait phase prediction model trained on benchmark datasets for evaluating a controller for prosthetic legs.Front Neurorobot. 2023 Jan 5;16:1064313. doi: 10.3389/fnbot.2022.1064313. eCollection 2022. Front Neurorobot. 2023. PMID: 36687207 Free PMC article.
References
-
- Au S, Berniker M and Herr H (2008) Powered ankle-foot prosthesis to assist level-ground and stair-descent gaits. Neural Networks 21(4), 654–666. - PubMed
-
- Graupe D, Salahi J and Kohn KH (1982) Multifunctional prosthesis and orthosis control via microcomputer identification of temporal pattern differences in single-site myoelectric signals. Journal of Biomedical Engineering 4(1), 17–22. - PubMed
-
- Hinton G, Srivastava N and Swersky K (2012) Neural networks for machine learning lecture 6a overview of mini-batch gradient descent. Cited on 14(8), 2.
Grants and funding
LinkOut - more resources
Full Text Sources