

Soft and lightweight fabric enables powerful and high-range pneumatic actuation
- PMID: 37043577
- PMCID: PMC10096572
- DOI: 10.1126/sciadv.adg1203
Soft and lightweight fabric enables powerful and high-range pneumatic actuation
Abstract
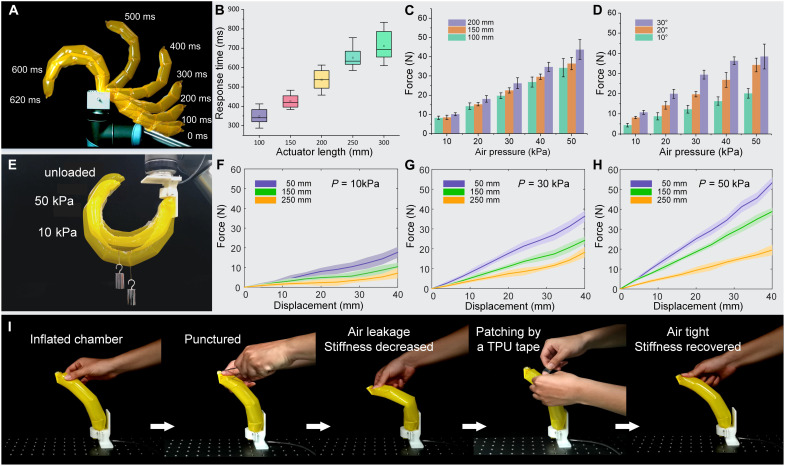
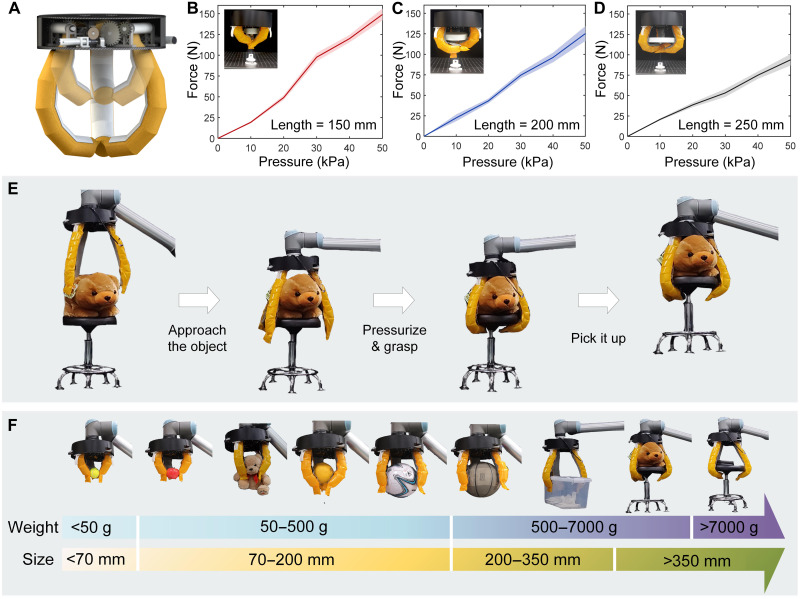
Soft structures and actuation allow robots, conventionally consisting of rigid components, to perform more compliant, adaptive interactions similar to living creatures. Although numerous functions of these types of actuators have been demonstrated in the literature, their hyperelastic designs generally suffer from limited workspaces and load-carrying capabilities primarily due to their structural stretchability factor. Here, we describe a series of pneumatic actuators based on soft but less stretchable fabric that can simultaneously perform tunable workspace and bear a high payload. The motion mode of the actuator is programmable, combinable, and predictable and is informed by rapid response to low input pressure. A robotic gripper using three fabric actuators is also presented. The gripper demonstrates a grasping force of over 150 N and a grasping range from 70 to 350 millimeters. The design concept and comprehensive guidelines presented would provide design and analysis foundations for applying less stretchable yet soft materials in soft robots to further enhance their practicality.
Figures



Similar articles
-
A Multimodal, Reconfigurable Workspace Soft Gripper for Advanced Grasping Tasks.Soft Robot. 2023 Jun;10(3):527-544. doi: 10.1089/soro.2021.0225. Epub 2022 Nov 7. Soft Robot. 2023. PMID: 36346280 Free PMC article.
-
Soft-Rigid Hybrid Revolute and Prismatic Joints Using Multilayered Bellow-Type Soft Pneumatic Actuators: Design, Characterization, and Its Application as Soft-Rigid Hybrid Gripper.Soft Robot. 2025 Apr;12(2):183-199. doi: 10.1089/soro.2022.0214. Epub 2024 Sep 20. Soft Robot. 2025. PMID: 39302852
-
Kirigami-Inspired 3D Printable Soft Pneumatic Actuators with Multiple Deformation Modes for Soft Robotic Applications.Soft Robot. 2023 Aug;10(4):737-748. doi: 10.1089/soro.2021.0199. Epub 2023 Feb 23. Soft Robot. 2023. PMID: 36827310
-
Multimodal Soft Robotic Actuation and Locomotion.Adv Mater. 2024 May;36(19):e2308829. doi: 10.1002/adma.202308829. Epub 2024 Feb 12. Adv Mater. 2024. PMID: 38305065 Review.
-
Bistable and Multistable Actuators for Soft Robots: Structures, Materials, and Functionalities.Adv Mater. 2022 May;34(19):e2110384. doi: 10.1002/adma.202110384. Epub 2022 Mar 15. Adv Mater. 2022. PMID: 35172026 Review.
Cited by
-
Deployable electronics with enhanced fatigue resistance for crumpling and tension.Sci Adv. 2025 Jan 24;11(4):eadr3654. doi: 10.1126/sciadv.adr3654. Epub 2025 Jan 22. Sci Adv. 2025. PMID: 39841835 Free PMC article.
-
Thermo-responsive jamming by particle shape change.Nat Commun. 2025 Mar 7;16(1):2303. doi: 10.1038/s41467-025-57475-5. Nat Commun. 2025. PMID: 40055334 Free PMC article.
-
Quantitative softness and texture bimodal haptic sensors for robotic clinical feature identification and intelligent picking.Sci Adv. 2024 Jul 26;10(30):eadp0348. doi: 10.1126/sciadv.adp0348. Epub 2024 Jul 24. Sci Adv. 2024. PMID: 39047112 Free PMC article.
-
Origami-Inspired Vacuum-Actuated Foldable Actuator Enabled Biomimetic Worm-like Soft Crawling Robot.Biomimetics (Basel). 2024 Sep 6;9(9):541. doi: 10.3390/biomimetics9090541. Biomimetics (Basel). 2024. PMID: 39329563 Free PMC article.
-
Evaluation of fabric-based pneumatic actuator enclosure and anchoring configurations in a pediatric soft robotic exosuit.Front Robot AI. 2024 Oct 11;11:1302862. doi: 10.3389/frobt.2024.1302862. eCollection 2024. Front Robot AI. 2024. PMID: 39463802 Free PMC article.
References
-
- S. W. Kwok, S. A. Morin, B. Mosadegh, J. H. So, R. F. Shepherd, R. V. Martinez, B. Smith, F. C. Simeone, A. A. Stokes, G. M. Whitesides, Magnetic assembly of soft robots with hard components. Adv. Funct. Mater. 24, 2180–2187 (2014).
-
- R. K. Katzschmann, J. DelPreto, R. MacCurdy, D. Rus, Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 3, eaar3449 (2018). - PubMed
LinkOut - more resources
Full Text Sources
