

Soft and lightweight fabric enables powerful and high-range pneumatic actuation
- PMID: 37043577
- PMCID: PMC10096572
- DOI: 10.1126/sciadv.adg1203
Soft and lightweight fabric enables powerful and high-range pneumatic actuation
Abstract
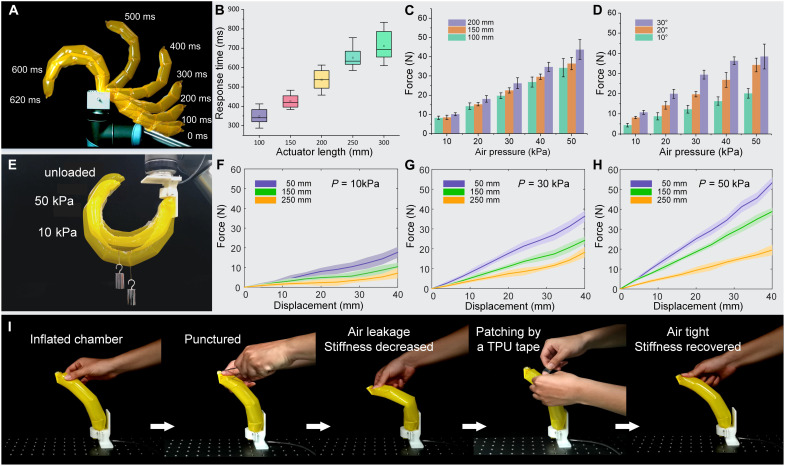
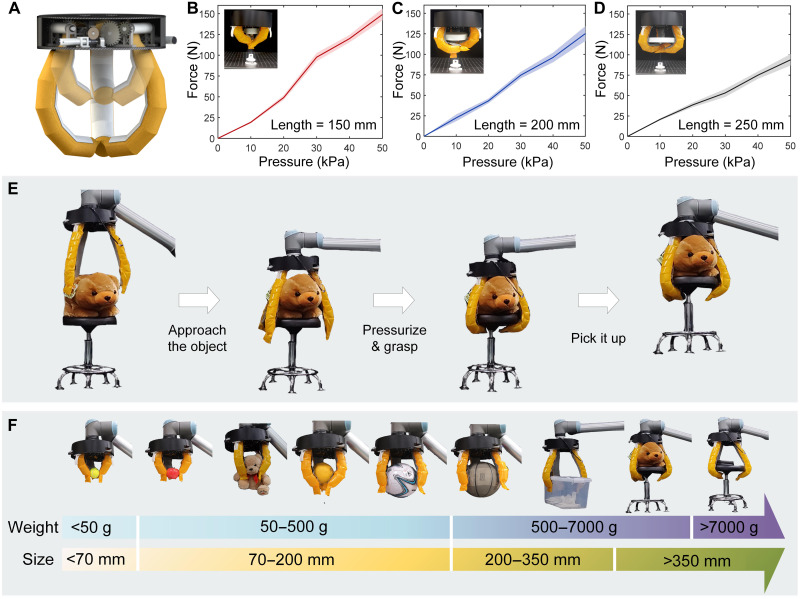
Soft structures and actuation allow robots, conventionally consisting of rigid components, to perform more compliant, adaptive interactions similar to living creatures. Although numerous functions of these types of actuators have been demonstrated in the literature, their hyperelastic designs generally suffer from limited workspaces and load-carrying capabilities primarily due to their structural stretchability factor. Here, we describe a series of pneumatic actuators based on soft but less stretchable fabric that can simultaneously perform tunable workspace and bear a high payload. The motion mode of the actuator is programmable, combinable, and predictable and is informed by rapid response to low input pressure. A robotic gripper using three fabric actuators is also presented. The gripper demonstrates a grasping force of over 150 N and a grasping range from 70 to 350 millimeters. The design concept and comprehensive guidelines presented would provide design and analysis foundations for applying less stretchable yet soft materials in soft robots to further enhance their practicality.
Figures



References
-
- S. W. Kwok, S. A. Morin, B. Mosadegh, J. H. So, R. F. Shepherd, R. V. Martinez, B. Smith, F. C. Simeone, A. A. Stokes, G. M. Whitesides, Magnetic assembly of soft robots with hard components. Adv. Funct. Mater. 24, 2180–2187 (2014).
-
- R. K. Katzschmann, J. DelPreto, R. MacCurdy, D. Rus, Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 3, eaar3449 (2018). - PubMed
LinkOut - more resources
Full Text Sources
