

Autonomous optimization of neuroprosthetic stimulation parameters that drive the motor cortex and spinal cord outputs in rats and monkeys
- PMID: 37044093
- PMCID: PMC10140617
- DOI: 10.1016/j.xcrm.2023.101008
Autonomous optimization of neuroprosthetic stimulation parameters that drive the motor cortex and spinal cord outputs in rats and monkeys
Abstract
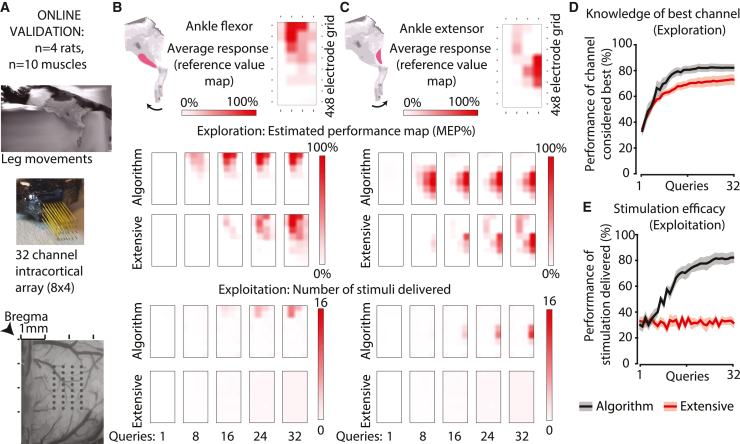
Neural stimulation can alleviate paralysis and sensory deficits. Novel high-density neural interfaces can enable refined and multipronged neurostimulation interventions. To achieve this, it is essential to develop algorithmic frameworks capable of handling optimization in large parameter spaces. Here, we leveraged an algorithmic class, Gaussian-process (GP)-based Bayesian optimization (BO), to solve this problem. We show that GP-BO efficiently explores the neurostimulation space, outperforming other search strategies after testing only a fraction of the possible combinations. Through a series of real-time multi-dimensional neurostimulation experiments, we demonstrate optimization across diverse biological targets (brain, spinal cord), animal models (rats, non-human primates), in healthy subjects, and in neuroprosthetic intervention after injury, for both immediate and continual learning over multiple sessions. GP-BO can embed and improve "prior" expert/clinical knowledge to dramatically enhance its performance. These results advocate for broader establishment of learning agents as structural elements of neuroprosthetic design, enabling personalization and maximization of therapeutic effectiveness.
Keywords: Bayesian optimization; artificial intelligence; black-box optimization; brain-computer interface; machine learning; neural interfaces; neuromodulation; neurostimulation; neurotechnology; precision medicine.
Copyright © 2023 The Author(s). Published by Elsevier Inc. All rights reserved.
Conflict of interest statement
Declaration of interests M.B. and M.M. submitted an international patent application (PCT/CA2020/051047) covering a device allowing performing coherent cortical stimulation during locomotion.(5) They are also co-founders of 12576830 Canada Inc., a start-up company developing neurostimulation technologies related to the aforementioned patent and publication.
Figures








References
-
- Gill M.L., Grahn P.J., Calvert J.S., Linde M.B., Lavrov I.A., Strommen J.A., Beck L.A., Sayenko D.G., Van Straaten M.G., Drubach D.I., et al. Neuromodulation of lumbosacral spinal networks enables independent stepping after complete paraplegia. Nat. Med. 2018;24:1677–1682. doi: 10.1038/s41591-018-0175-7. - DOI - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
