

Learning feature descriptors for pre- and intra-operative point cloud matching for laparoscopic liver registration
- PMID: 37079248
- PMCID: PMC10330103
- DOI: 10.1007/s11548-023-02893-3
Learning feature descriptors for pre- and intra-operative point cloud matching for laparoscopic liver registration
Abstract
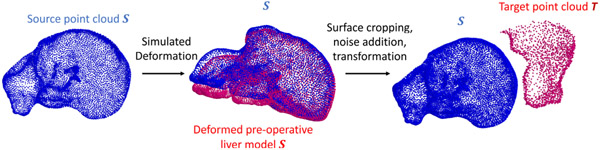
Purpose: In laparoscopic liver surgery, preoperative information can be overlaid onto the intra-operative scene by registering a 3D preoperative model to the intra-operative partial surface reconstructed from the laparoscopic video. To assist with this task, we explore the use of learning-based feature descriptors, which, to our best knowledge, have not been explored for use in laparoscopic liver registration. Furthermore, a dataset to train and evaluate the use of learning-based descriptors does not exist.
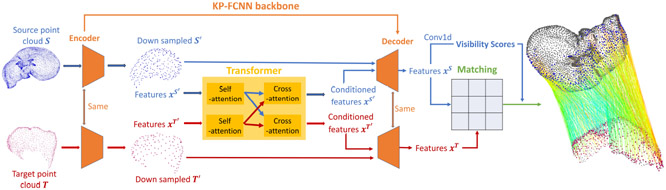
Methods: We present the LiverMatch dataset consisting of 16 preoperative models and their simulated intra-operative 3D surfaces. We also propose the LiverMatch network designed for this task, which outputs per-point feature descriptors, visibility scores, and matched points.
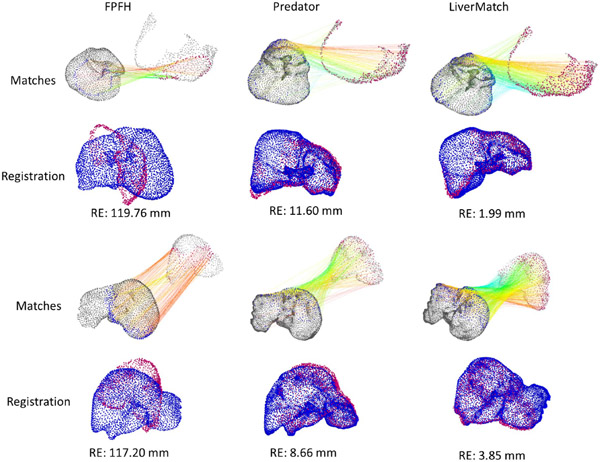
Results: We compare the proposed LiverMatch network with a network closest to LiverMatch and a histogram-based 3D descriptor on the testing split of the LiverMatch dataset, which includes two unseen preoperative models and 1400 intra-operative surfaces. Results suggest that our LiverMatch network can predict more accurate and dense matches than the other two methods and can be seamlessly integrated with a RANSAC-ICP-based registration algorithm to achieve an accurate initial alignment.
Conclusion: The use of learning-based feature descriptors in laparoscopic liver registration (LLR) is promising, as it can help achieve an accurate initial rigid alignment, which, in turn, serves as an initialization for subsequent non-rigid registration.
Keywords: 3D feature descriptors; Laparoscopic liver registration; Laparoscopic liver surgery; Non-rigid registration; Point cloud matching.
© 2023. CARS.
Figures
Similar articles
-
Preoperative and intraoperative laparoscopic liver surface registration using deep graph matching of representative overlapping points.Int J Comput Assist Radiol Surg. 2025 Feb;20(2):269-278. doi: 10.1007/s11548-024-03312-x. Epub 2024 Dec 31. Int J Comput Assist Radiol Surg. 2025. PMID: 39739191
-
Global rigid registration of CT to video in laparoscopic liver surgery.Int J Comput Assist Radiol Surg. 2018 Jun;13(6):947-956. doi: 10.1007/s11548-018-1781-z. Epub 2018 May 7. Int J Comput Assist Radiol Surg. 2018. PMID: 29736801 Free PMC article.
-
Matching Algorithm for 3D Point Cloud Recognition and Registration Based on Multi-Statistics Histogram Descriptors.Sensors (Basel). 2022 Jan 6;22(2):417. doi: 10.3390/s22020417. Sensors (Basel). 2022. PMID: 35062378 Free PMC article.
-
Rigid point cloud registration based on correspondence cloud for image-to-patient registration in image-guided surgery.Med Phys. 2024 Jul;51(7):4554-4566. doi: 10.1002/mp.17243. Epub 2024 Jun 10. Med Phys. 2024. PMID: 38856158
-
Video-based 3D reconstruction, laparoscope localization and deformation recovery for abdominal minimally invasive surgery: a survey.Int J Med Robot. 2016 Jun;12(2):158-78. doi: 10.1002/rcs.1661. Epub 2015 Apr 30. Int J Med Robot. 2016. PMID: 25931190 Review.
Cited by
-
Boundary Constraint-Free Biomechanical Model-Based Surface Matching for Intraoperative Liver Deformation Correction.IEEE Trans Med Imaging. 2025 Apr;44(4):1723-1734. doi: 10.1109/TMI.2024.3515632. Epub 2025 Apr 3. IEEE Trans Med Imaging. 2025. PMID: 40030471
-
Towards a zero-shot low-latency navigation for open surgery augmented reality applications.Int J Comput Assist Radiol Surg. 2025 Aug 5. doi: 10.1007/s11548-025-03480-4. Online ahead of print. Int J Comput Assist Radiol Surg. 2025. PMID: 40764871
-
Preoperative and intraoperative laparoscopic liver surface registration using deep graph matching of representative overlapping points.Int J Comput Assist Radiol Surg. 2025 Feb;20(2):269-278. doi: 10.1007/s11548-024-03312-x. Epub 2024 Dec 31. Int J Comput Assist Radiol Surg. 2025. PMID: 39739191
-
Deep hashing for global registration of preoperative CT and video images for laparoscopic liver surgery.Int J Comput Assist Radiol Surg. 2025 Jul;20(7):1461-1469. doi: 10.1007/s11548-025-03418-w. Epub 2025 May 23. Int J Comput Assist Radiol Surg. 2025. PMID: 40407996 Free PMC article.
-
Comparative Analysis of Non-Rigid Registration Techniques for Liver Surface Registration.Proc SPIE Int Soc Opt Eng. 2024 Feb;12928:129282B. doi: 10.1117/12.3008594. Epub 2024 Mar 29. Proc SPIE Int Soc Opt Eng. 2024. PMID: 39129751 Free PMC article.
References
-
- Haouchine N, Dequidt J, Peterlik I, Kerrien E, Berger M-O, Cotin S: Image-guided simulation of heterogeneous tissue deformation for augmented reality during hepatic surgery. In: 2013 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), pp. 199–208 (2013). IEEE
-
- Collins T, Pizarro D, Gasparini S, Bourdel N, Chauvet P, Canis M, Calvet L, Bartoli A: Augmented reality guided laparoscopic surgery of the uterus. IEEE Transactions on Medical Imaging 40(1), 371–380 (2020) - PubMed
-
- Espinel Y, Calvet L, Botros K, Buc E, Tilmant C, Bartoli A: Using multiple images and contours for deformable 3d-2d registration of a preoperative ct in laparoscopic liver surgery. In: International Conference on Medical Image Computing and Computer-Assisted Intervention, pp. 657–666 (2021). Springer - PubMed
-
- Modrzejewski R, Collins T, Seeliger B, Bartoli A, Hostettler A, Marescaux J: An in vivo porcine dataset and evaluation methodology to measure soft-body laparoscopic liver registration accuracy with an extended algorithm that handles collisions. International journal of computer assisted radiology and surgery 14(7), 1237–1245 (2019) - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
