

Bioinspired soft robots based on organic polymer-crystal hybrid materials with response to temperature and humidity
- PMID: 37085510
- PMCID: PMC10121608
- DOI: 10.1038/s41467-023-37964-1
Bioinspired soft robots based on organic polymer-crystal hybrid materials with response to temperature and humidity
Abstract
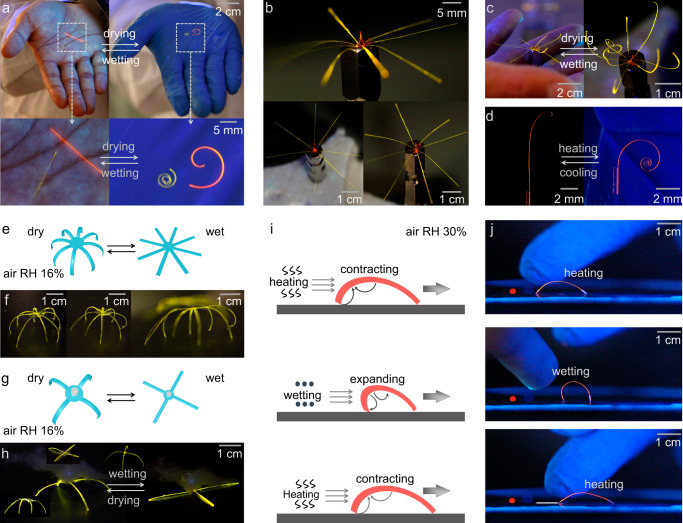
The capability of stimulated response by mechanical deformation to induce motion or actuation is the foundation of lightweight organic, dynamic materials for designing light and soft robots. Various biomimetic soft robots are constructed to demonstrate the vast versatility of responses and flexibility in shape-shifting. We now report that the integration of organic molecular crystals and polymers brings about synergistic improvement in the performance of both materials as a hybrid materials class, with the polymers adding hygroresponsive and thermally responsive functionalities to the crystals. The resulting hybrid dynamic elements respond within milliseconds, which represents several orders of magnitude of improvement in the time response relative to some other type of common actuators. Combining molecular crystals with polymers brings crystals as largely overlooked materials much closer to specific applications in soft (micro)robotics and related fields.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures



Similar articles
-
Hybrid Elastic Organic Crystals that Respond to Aerial Humidity.Angew Chem Int Ed Engl. 2022 Mar 28;61(14):e202200196. doi: 10.1002/anie.202200196. Epub 2022 Feb 14. Angew Chem Int Ed Engl. 2022. PMID: 35090063
-
Light-Driven Crystal-Polymer Hybrid Actuators.Front Robot AI. 2021 May 13;8:684287. doi: 10.3389/frobt.2021.684287. eCollection 2021. Front Robot AI. 2021. PMID: 34055902 Free PMC article.
-
Special section on biomimetics of movement.Bioinspir Biomim. 2011 Dec;6(4):040201. doi: 10.1088/1748-3182/6/4/040201. Epub 2011 Nov 29. Bioinspir Biomim. 2011. PMID: 22128305
-
Bioinspired Stimuli-Responsive Materials for Soft Actuators.Biomimetics (Basel). 2024 Feb 21;9(3):128. doi: 10.3390/biomimetics9030128. Biomimetics (Basel). 2024. PMID: 38534813 Free PMC article. Review.
-
Actuation Performance and Versatility of Photothermally Driven Organic Crystals.Angew Chem Int Ed Engl. 2025 Jan 2;64(1):e202418570. doi: 10.1002/anie.202418570. Epub 2024 Nov 11. Angew Chem Int Ed Engl. 2025. PMID: 39400511 Review.
Cited by
-
Rejuvenating liquid crystal elastomers for self-growth.Nat Commun. 2024 Aug 27;15(1):7381. doi: 10.1038/s41467-024-51544-x. Nat Commun. 2024. PMID: 39191791 Free PMC article.
-
Predicting photoactivity in dithienylethene crystalline solids.IUCrJ. 2023 Nov 1;10(Pt 6):635-637. doi: 10.1107/S2052252523008990. IUCrJ. 2023. PMID: 37860977 Free PMC article.
-
An intelligent spinal soft robot with self-sensing adaptability.Innovation (Camb). 2024 May 21;5(4):100640. doi: 10.1016/j.xinn.2024.100640. eCollection 2024 Jul 1. Innovation (Camb). 2024. PMID: 38881800 Free PMC article.
-
An Ultra-Fast Rolling Double-Helical Robot Driven by Constant Humidity.Adv Sci (Weinh). 2025 Jun;12(23):e2500577. doi: 10.1002/advs.202500577. Epub 2025 Apr 2. Adv Sci (Weinh). 2025. PMID: 40171820 Free PMC article.
-
Cryogenically Flexible Phosphorescent Organic Crystals that Transmit Self-Sustained Persistent Luminescence with Spatiotemporal Control.J Am Chem Soc. 2025 Jul 2;147(26):22961-22971. doi: 10.1021/jacs.5c05733. Epub 2025 Jun 16. J Am Chem Soc. 2025. PMID: 40522233 Free PMC article.
References
-
- Stefani C, et al. Mechanical softness of ferroelectric 180° domain walls. Phys. Rev. X. 2020;10:041001.
-
- Liu Y, et al. Bioinspired triboelectric soft robot driven by mechanical energy. Adv. Funct. Mater. 2021;31:2104770. doi: 10.1002/adfm.202104770. - DOI
-
- Wang Y, et al. Bio-inspired stretchable, adhesive, and conductive structural color film for visually flexible electronics. Adv. Funct. Mater. 2020;30:2000151. doi: 10.1002/adfm.202000151. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
