

Recognition and Counting of Apples in a Dynamic State Using a 3D Camera and Deep Learning Algorithms for Robotic Harvesting Systems
- PMID: 37112151
- PMCID: PMC10145955
- DOI: 10.3390/s23083810
Recognition and Counting of Apples in a Dynamic State Using a 3D Camera and Deep Learning Algorithms for Robotic Harvesting Systems
Abstract
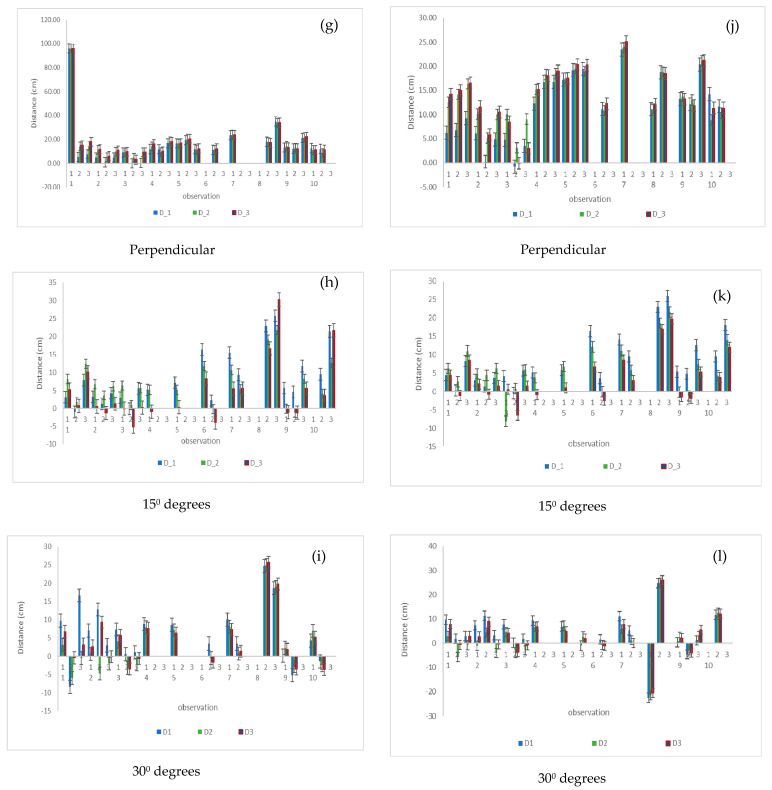
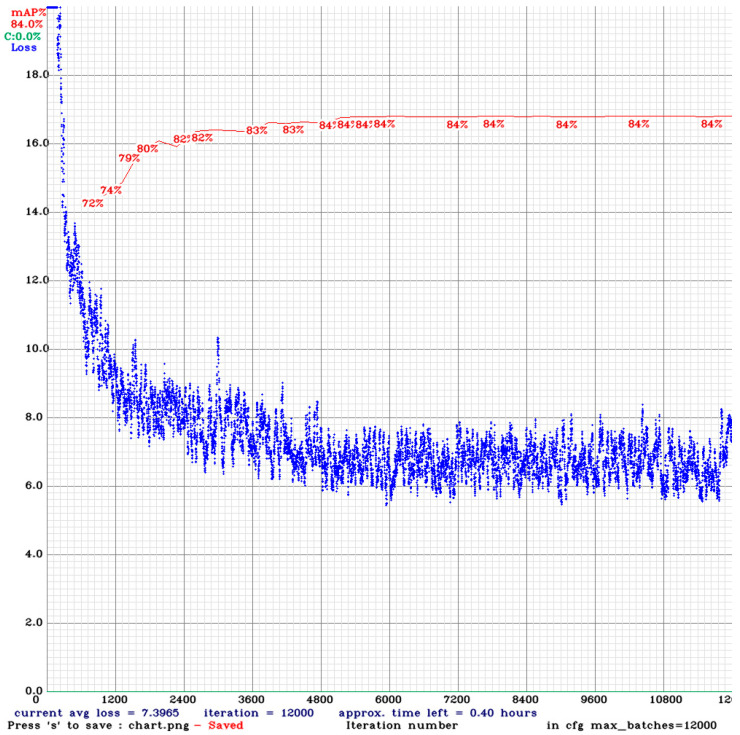
Recognition and 3D positional estimation of apples during harvesting from a robotic platform in a moving vehicle are still challenging. Fruit clusters, branches, foliage, low resolution, and different illuminations are unavoidable and cause errors in different environmental conditions. Therefore, this research aimed to develop a recognition system based on training datasets from an augmented, complex apple orchard. The recognition system was evaluated using deep learning algorithms established from a convolutional neural network (CNN). The dynamic accuracy of the modern artificial neural networks involving 3D coordinates for deploying robotic arms at different forward-moving speeds from an experimental vehicle was investigated to compare the recognition and tracking localization accuracy. In this study, a Realsense D455 RGB-D camera was selected to acquire 3D coordinates of each detected and counted apple attached to artificial trees placed in the field to propose a specially designed structure for ease of robotic harvesting. A 3D camera, YOLO (You Only Look Once), YOLOv4, YOLOv5, YOLOv7, and EfficienDet state-of-the-art models were utilized for object detection. The Deep SORT algorithm was employed for tracking and counting detected apples using perpendicular, 15°, and 30° orientations. The 3D coordinates were obtained for each tracked apple when the on-board camera in the vehicle passed the reference line and was set in the middle of the image frame. To optimize harvesting at three different speeds (0.052 ms-1, 0.069 ms-1, and 0.098 ms-1), the accuracy of 3D coordinates was compared for three forward-moving speeds and three camera angles (15°, 30°, and 90°). The mean average precision (mAP@0.5) values of YOLOv4, YOLOv5, YOLOv7, and EfficientDet were 0.84, 0.86, 0.905, and 0.775, respectively. The lowest root mean square error (RMSE) was 1.54 cm for the apples detected by EfficientDet at a 15° orientation and a speed of 0.098 ms-1. In terms of counting apples, YOLOv5 and YOLOv7 showed a higher number of detections in outdoor dynamic conditions, achieving a counting accuracy of 86.6%. We concluded that the EfficientDet deep learning algorithm at a 15° orientation in 3D coordinates can be employed for further robotic arm development while harvesting apples in a specially designed orchard.
Keywords: Deep SORT; YOLO; dynamic accuracy; fruit detection; localization.
Conflict of interest statement
The authors declare no conflict of interest.
Figures




















References
-
- Wang X., Kang H., Zhou H., Au W., Chen C. Geometry-aware fruit grasping estimation for robotic harvesting in apple orchards. Comput. Electron. Agric. 2022;193:106716. doi: 10.1016/j.compag.2022.106716. - DOI
-
- Gongal A., Amatya S., Karkee M., Zhang Q., Lewis K. Sensors and systems for fruit detection and localization: A review. Comput. Electron. Agric. 2015;116:8–119. doi: 10.1016/j.compag.2015.05.021. - DOI
-
- Andriyanov N., Khasanshin I., Utkin D., Gataullin T., Ignar S., Shumaev V., Soloviev V. Intelligent System for Estimation of the Spatial Position of apples based on YOLOv3 and real sense depth camera D415. Symmetry. 2022;14:148. doi: 10.3390/sym14010148. - DOI
-
- Yoshida T., Kawahara T., Fukao T. Fruit recognition method for a harvesting robot with RGB-D cameras. Robomech J. 2022;9:15. doi: 10.1186/s40648-022-00230-y. - DOI
-
- Bargoti S., Underwood J.P. Image segmentation for fruit detection and yield estimation in apple orchards. J. Field Robot. 2017;34:1039–1060. doi: 10.1002/rob.21699. - DOI
LinkOut - more resources
Full Text Sources
