

Improved Mask R-CNN Multi-Target Detection and Segmentation for Autonomous Driving in Complex Scenes
- PMID: 37112194
- PMCID: PMC10146362
- DOI: 10.3390/s23083853
Improved Mask R-CNN Multi-Target Detection and Segmentation for Autonomous Driving in Complex Scenes
Abstract
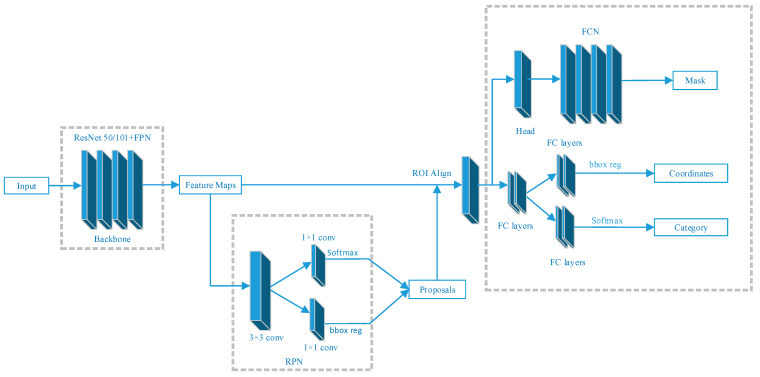
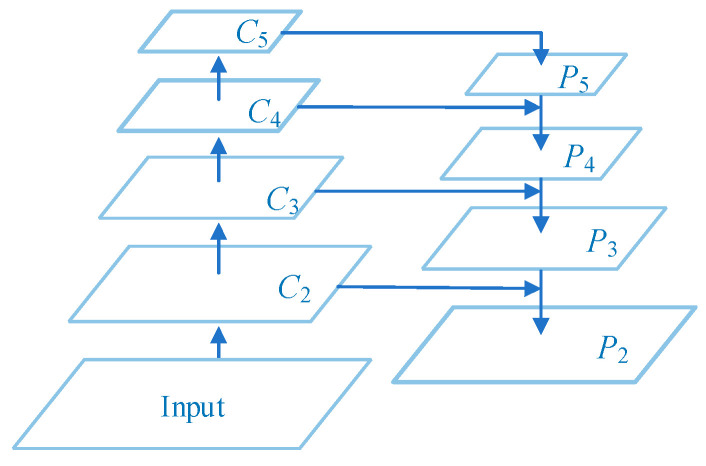
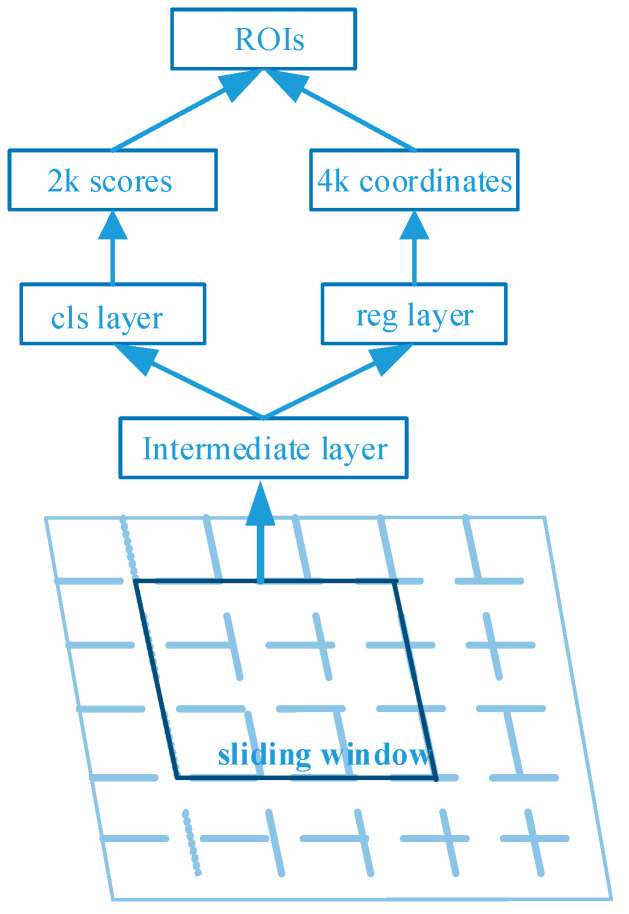
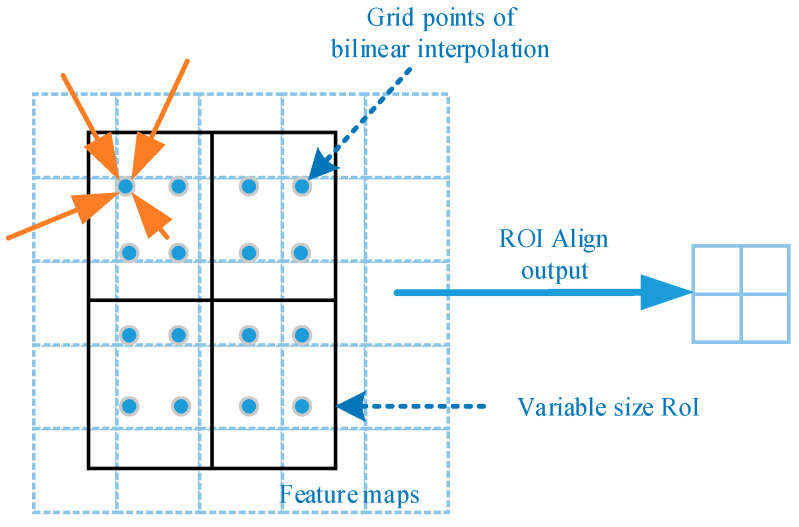
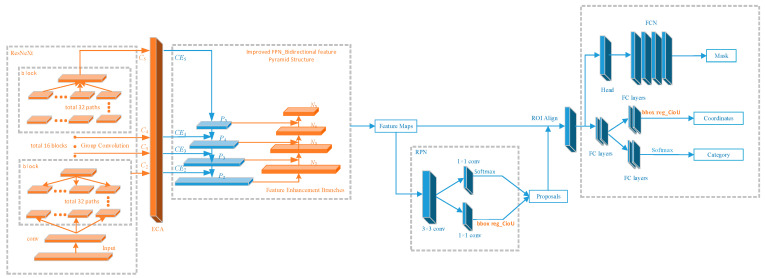
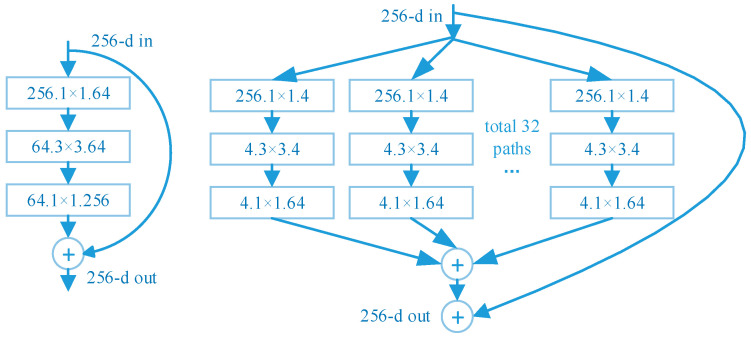
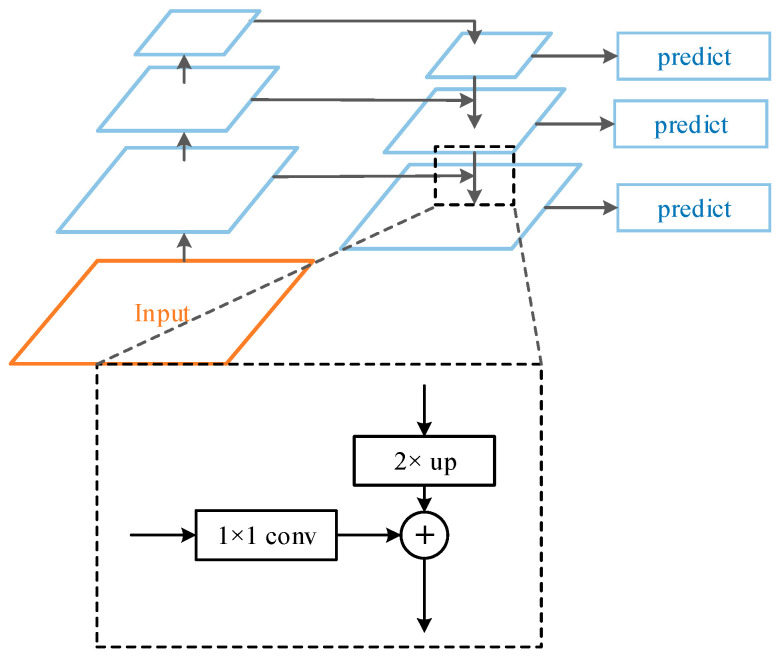
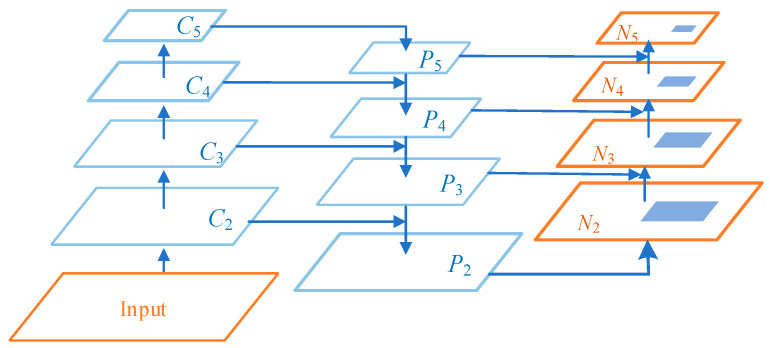
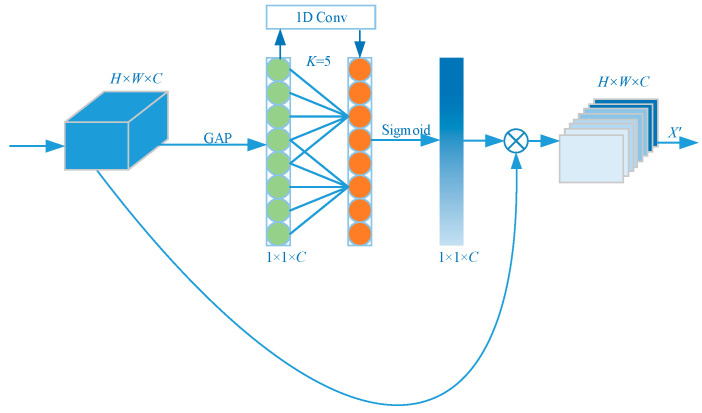
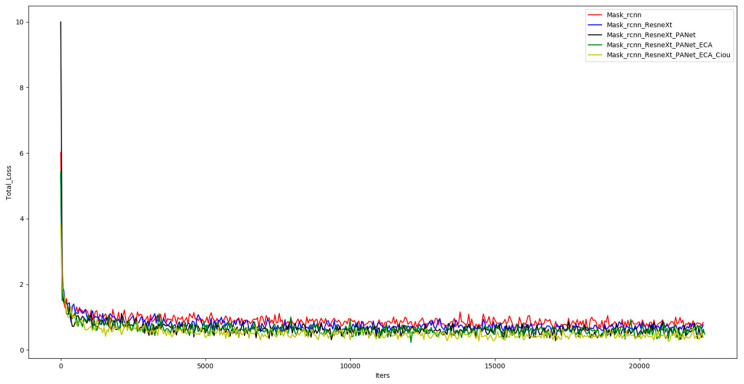
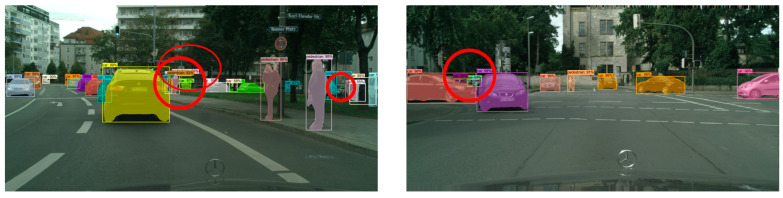
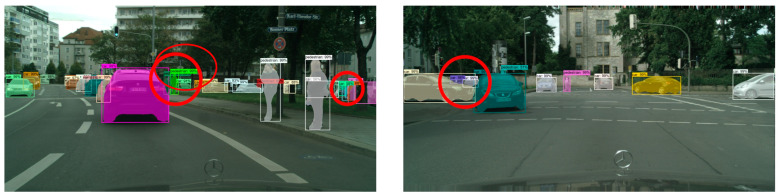
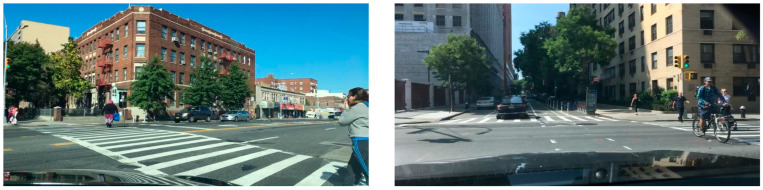
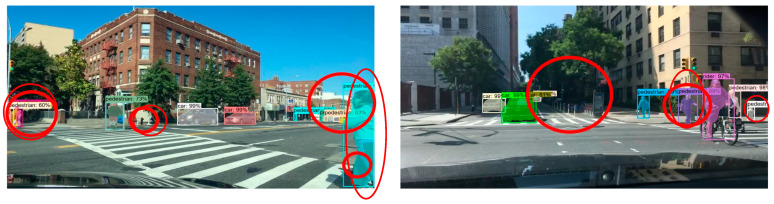
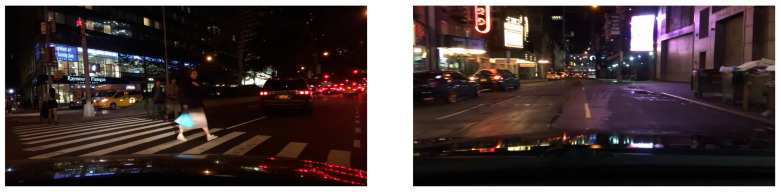
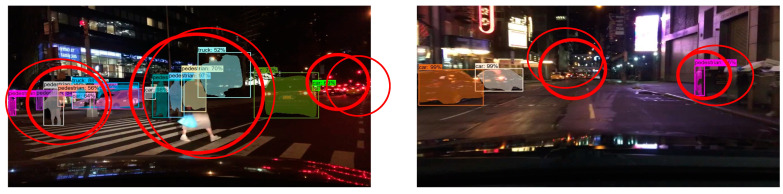
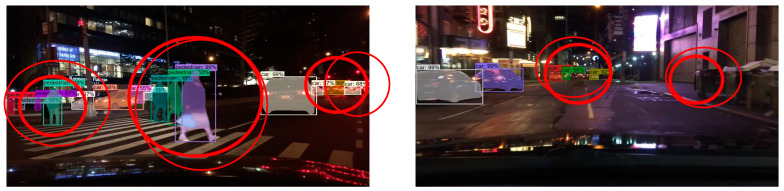
Vision-based target detection and segmentation has been an important research content for environment perception in autonomous driving, but the mainstream target detection and segmentation algorithms have the problems of low detection accuracy and poor mask segmentation quality for multi-target detection and segmentation in complex traffic scenes. To address this problem, this paper improved the Mask R-CNN by replacing the backbone network ResNet with the ResNeXt network with group convolution to further improve the feature extraction capability of the model. Furthermore, a bottom-up path enhancement strategy was added to the Feature Pyramid Network (FPN) to achieve feature fusion, while an efficient channel attention module (ECA) was added to the backbone feature extraction network to optimize the high-level low resolution semantic information graph. Finally, the bounding box regression loss function smooth L1 loss was replaced by CIoU loss to speed up the model convergence and minimize the error. The experimental results showed that the improved Mask R-CNN algorithm achieved 62.62% mAP for target detection and 57.58% mAP for segmentation accuracy on the publicly available CityScapes autonomous driving dataset, which were 4.73% and 3.96%% better than the original Mask R-CNN algorithm, respectively. The migration experiments showed that it has good detection and segmentation effects in each traffic scenario of the publicly available BDD autonomous driving dataset.
Keywords: CIoU; FPN; Mask R-CNN; ResNeXt; autonomous driving; efficient channel attention module; environment perception; multi-target.
Conflict of interest statement
The authors declare no conflict of interest.
Figures



Similar articles
-
Fusing attention mechanism with Mask R-CNN for instance segmentation of grape cluster in the field.Front Plant Sci. 2022 Jul 22;13:934450. doi: 10.3389/fpls.2022.934450. eCollection 2022. Front Plant Sci. 2022. PMID: 35937371 Free PMC article.
-
Mask-Refined R-CNN: A Network for Refining Object Details in Instance Segmentation.Sensors (Basel). 2020 Feb 13;20(4):1010. doi: 10.3390/s20041010. Sensors (Basel). 2020. PMID: 32069927 Free PMC article.
-
Road Traffic Sign Detection Method Based on RTS R-CNN Instance Segmentation Network.Sensors (Basel). 2023 Jul 20;23(14):6543. doi: 10.3390/s23146543. Sensors (Basel). 2023. PMID: 37514837 Free PMC article.
-
Face Mask-Wearing Detection Model Based on Loss Function and Attention Mechanism.Comput Intell Neurosci. 2022 Jul 12;2022:2452291. doi: 10.1155/2022/2452291. eCollection 2022. Comput Intell Neurosci. 2022. PMID: 35865498 Free PMC article. Review.
-
A Review of Vision-Based Multi-Task Perception Research Methods for Autonomous Vehicles.Sensors (Basel). 2025 Apr 20;25(8):2611. doi: 10.3390/s25082611. Sensors (Basel). 2025. PMID: 40285295 Free PMC article. Review.
Cited by
-
Deep learning for automated boundary detection and segmentation in organ donation photography.Innov Surg Sci. 2024 Aug 20:iss-2024-0022. doi: 10.1515/iss-2024-0022. Online ahead of print. Innov Surg Sci. 2024. PMID: 40568340 Free PMC article.
-
YOLO-SDL: a lightweight wheat grain detection technology based on an improved YOLOv8n model.Front Plant Sci. 2024 Nov 19;15:1495222. doi: 10.3389/fpls.2024.1495222. eCollection 2024. Front Plant Sci. 2024. PMID: 39634063 Free PMC article.
-
Optimized Design of EdgeBoard Intelligent Vehicle Based on PP-YOLOE.Sensors (Basel). 2024 May 16;24(10):3180. doi: 10.3390/s24103180. Sensors (Basel). 2024. PMID: 38794034 Free PMC article.
-
Wind Speed Prediction Based on Error Compensation.Sensors (Basel). 2023 May 19;23(10):4905. doi: 10.3390/s23104905. Sensors (Basel). 2023. PMID: 37430818 Free PMC article.
-
Multi-target detection and tracking based on CRF network and spatio-temporal attention for sports videos.Sci Rep. 2025 Feb 25;15(1):6808. doi: 10.1038/s41598-025-89929-7. Sci Rep. 2025. PMID: 40000758 Free PMC article.
References
-
- Grigorescu S., Trasnea B., Cocias T., Macesanu G. A survey of deep learning techniques for autonomous driving. J. Field Robot. 2022;37:362–386. doi: 10.1002/rob.21918. - DOI
-
- Janai J., Güney F., Behl A., Geiger A. Computer vision for autonomous vehicles: Problems, datasets and state of the art. Found. Trends® Comput. Graph. Vis. 2020;12:1–308. doi: 10.1561/0600000079. - DOI
-
- Su L., Sun Y.-X., Yuan S.-Z. A survey of instance segmentation research based on deep learning. CAAI Trans. Intell. Syst. 2022;17:16.
-
- Joseph R., Santosh D., Ross G., Ali F. You only look once: Unified, real-time object detection; Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition; Las Vegas, NV, USA. 27–30 June 2016; pp. 779–788. - DOI
-
- Liu W., Anguelov D., Erhan D., Szegedy C., Reed S., Fu C.-F., Berg A.C. Ssd: Single shot multibox detector; Proceedings of the Computer Vision–ECCV 2016: 14th European Conference; Amsterdam, The Netherlands. 11–14 October 2016; Berlin/Heidelberg, Germany: Springer International Publishing; 2016. Part I.
Grants and funding
LinkOut - more resources
Full Text Sources
