

Biomimetic Approaches for Human Arm Motion Generation: Literature Review and Future Directions
- PMID: 37112253
- PMCID: PMC10143908
- DOI: 10.3390/s23083912
Biomimetic Approaches for Human Arm Motion Generation: Literature Review and Future Directions
Abstract
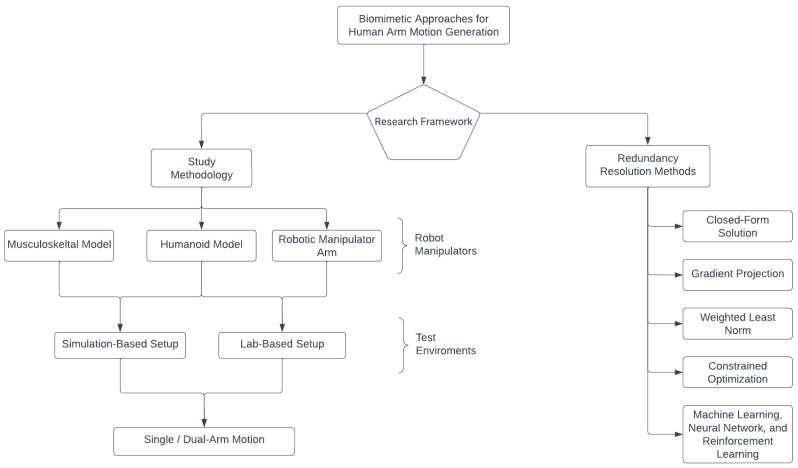
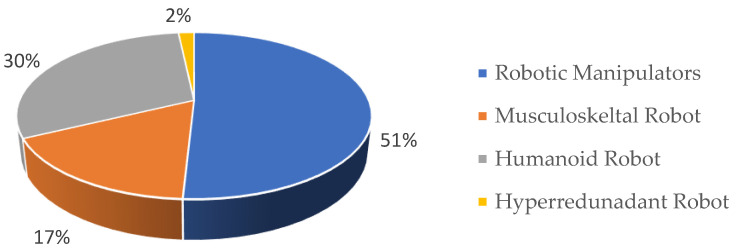
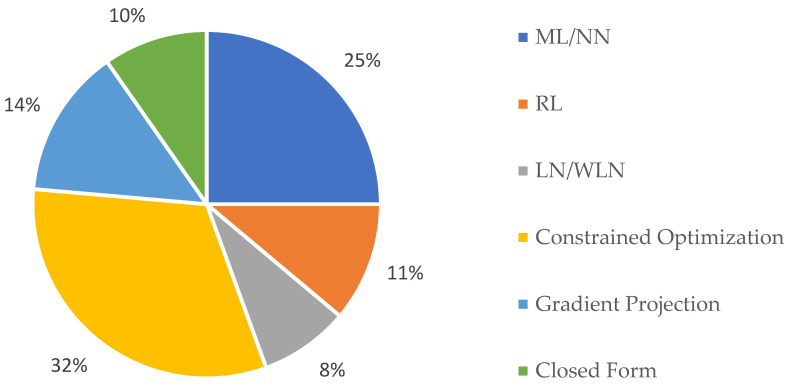
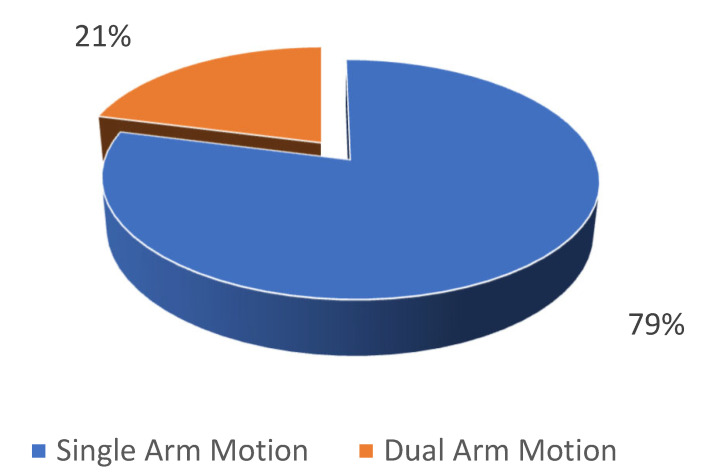
In recent years, numerous studies have been conducted to analyze how humans subconsciously optimize various performance criteria while performing a particular task, which has led to the development of robots that are capable of performing tasks with a similar level of efficiency as humans. The complexity of the human body has led researchers to create a framework for robot motion planning to recreate those motions in robotic systems using various redundancy resolution methods. This study conducts a thorough analysis of the relevant literature to provide a detailed exploration of the different redundancy resolution methodologies used in motion generation for mimicking human motion. The studies are investigated and categorized according to the study methodology and various redundancy resolution methods. An examination of the literature revealed a strong trend toward formulating intrinsic strategies that govern human movement through machine learning and artificial intelligence. Subsequently, the paper critically evaluates the existing approaches and highlights their limitations. It also identifies the potential research areas that hold promise for future investigations.
Keywords: biomimetics; human motion control; humanoid robots; musculoskeletal model.
Conflict of interest statement
The authors have disclosed the absence of any potential conflict of interest pertaining to the research, authorship, and/or publication of this article.
Figures
Similar articles
-
A Whole-Body Coordinated Motion Control Method for Highly Redundant Degrees of Freedom Mobile Humanoid Robots.Biomimetics (Basel). 2024 Dec 16;9(12):766. doi: 10.3390/biomimetics9120766. Biomimetics (Basel). 2024. PMID: 39727770 Free PMC article.
-
Hebbian learning for online prediction, neural recall and classical conditioning of anthropomimetic robot arm motions.Bioinspir Biomim. 2018 Oct 16;13(6):066009. doi: 10.1088/1748-3190/aae1c2. Bioinspir Biomim. 2018. PMID: 30221625
-
Self-organized coordinated motion in groups of physically connected robots.IEEE Trans Syst Man Cybern B Cybern. 2007 Feb;37(1):224-39. doi: 10.1109/tsmcb.2006.881299. IEEE Trans Syst Man Cybern B Cybern. 2007. PMID: 17278574
-
The potential scope of a humanoid robot in anatomy education: a review of a unique proposal.Surg Radiol Anat. 2022 Oct;44(10):1309-1317. doi: 10.1007/s00276-022-03020-8. Epub 2022 Sep 20. Surg Radiol Anat. 2022. PMID: 36127513 Review.
-
Organic Synapses for Neuromorphic Electronics: From Brain-Inspired Computing to Sensorimotor Nervetronics.Acc Chem Res. 2019 Apr 16;52(4):964-974. doi: 10.1021/acs.accounts.8b00553. Epub 2019 Mar 21. Acc Chem Res. 2019. PMID: 30896916 Review.
Cited by
-
Design of Low-Cost Modular Bio-Inspired Electric-Pneumatic Actuator (EPA)-Driven Legged Robots.Biomimetics (Basel). 2024 Mar 7;9(3):164. doi: 10.3390/biomimetics9030164. Biomimetics (Basel). 2024. PMID: 38534849 Free PMC article.
-
Robust tracking control of a minimal realization model of an impaired human hand for anthropomorphic coordination.Heliyon. 2024 Feb 27;10(5):e26941. doi: 10.1016/j.heliyon.2024.e26941. eCollection 2024 Mar 15. Heliyon. 2024. PMID: 39669485 Free PMC article.
-
CARRT-Motion Capture Data for Robotic Human Upper Body Model.Sensors (Basel). 2023 Oct 10;23(20):8354. doi: 10.3390/s23208354. Sensors (Basel). 2023. PMID: 37896449 Free PMC article.
References
-
- Bar-Cohen Y. Biomimetics: Biologically Inspired Technologies. CRC Press; Boca Raton, FL, USA: 2005.
-
- Schmitt O.H. Where are we now and where are we going; Proceedings of the USAF Air Research and Development Command Symposium on Bionics; Dayton, OH, USA. 19–21 March 1961.
-
- Iavazzo C., Gkegke X.-E.D., Iavazzo P.-E., Gkegkes I.D. Evolution of robots throughout history from Hephaestus to Da Vinci Robot. Acta Med.-Hist. Adriat. 2014;12:247–258. - PubMed
-
- Bogue R. Humanoid robots from the past to the present. Ind. Robot. Int. J. Robot. Res. Appl. 2020;47:465–472. doi: 10.1108/IR-05-2020-0088. - DOI
-
- Hirai K., Hirose M., Haikawa Y., Takenaka T. The development of Honda humanoid robot; Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146); Leuven, Belgium. 20 May 1998; Piscataway, NJ, USA: IEEE; 1998.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
