

Fuzzy Adaptive Passive Control Strategy Design for Upper-Limb End-Effector Rehabilitation Robot
- PMID: 37112385
- PMCID: PMC10146308
- DOI: 10.3390/s23084042
Fuzzy Adaptive Passive Control Strategy Design for Upper-Limb End-Effector Rehabilitation Robot
Abstract
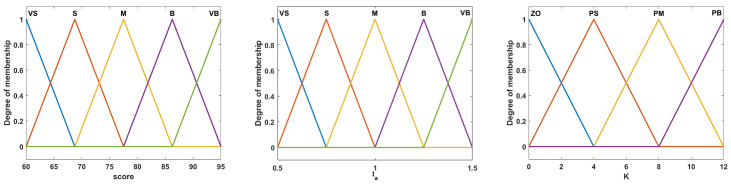
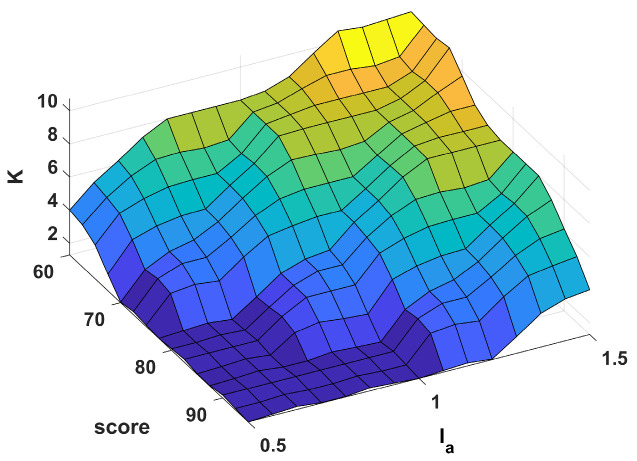
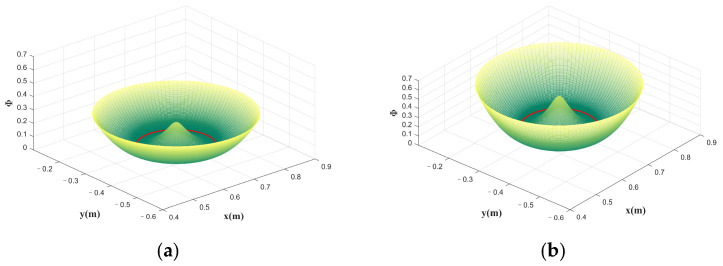
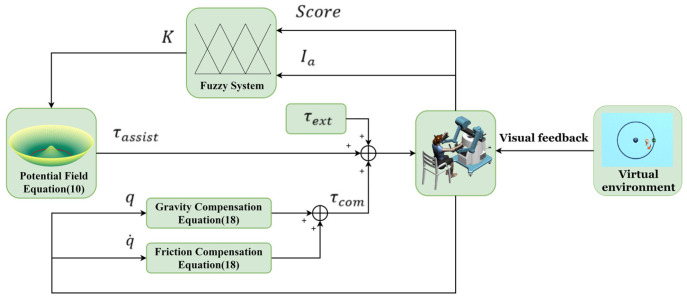
Robot-assisted rehabilitation therapy has been proven to effectively improve upper-limb motor function in stroke patients. However, most current rehabilitation robotic controllers will provide too much assistance force and focus only on the patient's position tracking performance while ignoring the patient's interactive force situation, resulting in the inability to accurately assess the patient's true motor intention and difficulty stimulating the patient's initiative, thus negatively affecting the patient's rehabilitation outcome. Therefore, this paper proposes a fuzzy adaptive passive (FAP) control strategy based on subjects' task performance and impulse. To ensure the safety of subjects, a passive controller based on the potential field is designed to guide and assist patients in their movements, and the stability of the controller is demonstrated in a passive formalism. Then, using the subject's task performance and impulse as evaluation indicators, fuzzy logic rules were designed and used as an evaluation algorithm to quantitively assess the subject's motor ability and to adaptively modify the stiffness coefficient of the potential field and thus change the magnitude of the assistance force to stimulate the subject's initiative. Through experiments, this control strategy has been shown to not only improve the subject's initiative during the training process and ensure their safety during training but also enhance the subject's motor learning ability.
Keywords: assist-as-needed; end-effector rehabilitation robot; fuzzy logic; human–robot interaction; potential field.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

Similar articles
-
[Research on mode adjustment control strategy of upper limb rehabilitation robot based on fuzzy recognition of interaction force].Sheng Wu Yi Xue Gong Cheng Xue Za Zhi. 2024 Feb 25;41(1):90-97. doi: 10.7507/1001-5515.202207018. Sheng Wu Yi Xue Gong Cheng Xue Za Zhi. 2024. PMID: 38403608 Free PMC article. Chinese.
-
Patient's Healthy-Limb Motion Characteristic-Based Assist-As-Needed Control Strategy for Upper-Limb Rehabilitation Robots.Sensors (Basel). 2024 Mar 25;24(7):2082. doi: 10.3390/s24072082. Sensors (Basel). 2024. PMID: 38610293 Free PMC article.
-
Performance-Based Hybrid Control of a Cable-Driven Upper-Limb Rehabilitation Robot.IEEE Trans Biomed Eng. 2021 Apr;68(4):1351-1359. doi: 10.1109/TBME.2020.3027823. Epub 2021 Mar 18. IEEE Trans Biomed Eng. 2021. PMID: 32997619
-
Robotic assessment of upper limb motor function after stroke.Am J Phys Med Rehabil. 2012 Nov;91(11 Suppl 3):S255-69. doi: 10.1097/PHM.0b013e31826bcdc1. Am J Phys Med Rehabil. 2012. PMID: 23080041 Review.
-
Robotic technologies and rehabilitation: new tools for stroke patients' therapy.Biomed Res Int. 2013;2013:153872. doi: 10.1155/2013/153872. Epub 2013 Nov 20. Biomed Res Int. 2013. PMID: 24350244 Free PMC article. Review.
Cited by
-
Design and Control of an Upper Limb Bionic Exoskeleton Rehabilitation Device Based on Tensegrity Structure.Appl Bionics Biomech. 2024 Aug 29;2024:5905225. doi: 10.1155/2024/5905225. eCollection 2024. Appl Bionics Biomech. 2024. PMID: 39239384 Free PMC article.
-
Enhancing Energy Efficiency and Fast Decision Making for Medical Sensors in Healthcare Systems: An Overview and Novel Proposal.Sensors (Basel). 2023 Aug 20;23(16):7286. doi: 10.3390/s23167286. Sensors (Basel). 2023. PMID: 37631822 Free PMC article.
References
MeSH terms
Grants and funding
- 2022YFC3601701/National Key R&D Program of China
- 2020Z082, 2020Z022/Ningbo Municipal Science and Technology Innovation 2025 Major Project
- 2021SZKY0205/Director Fund of Ningbo Institute of Materials Technology and Engineering, Chinese Academy of Sciences
- 2021KY333/Zhejiang Provincial Medical and Health Research Fund
- 2021S084/Public Welfare Science and Technology Projects of Ningbo
LinkOut - more resources
Full Text Sources
Medical
Miscellaneous
