

Research on Synchronous Control of Active Disturbance Rejection Position of Multiple Hydraulic Cylinders of Digging-Anchor-Support Robot
- PMID: 37112433
- PMCID: PMC10144339
- DOI: 10.3390/s23084092
Research on Synchronous Control of Active Disturbance Rejection Position of Multiple Hydraulic Cylinders of Digging-Anchor-Support Robot
Abstract
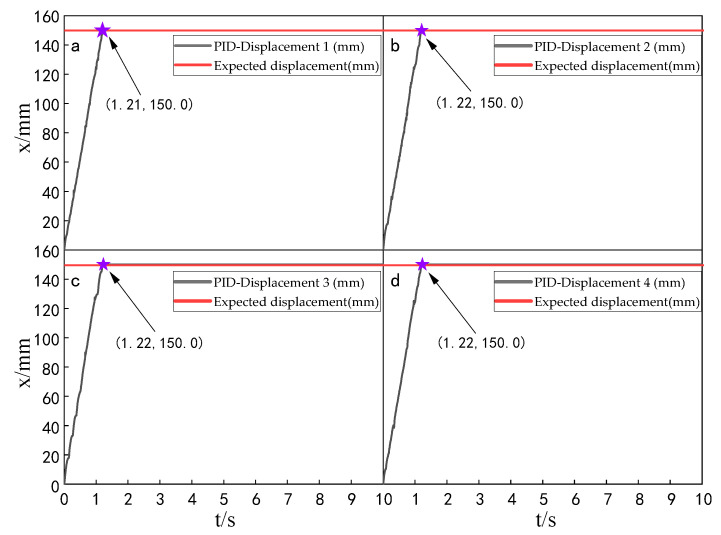
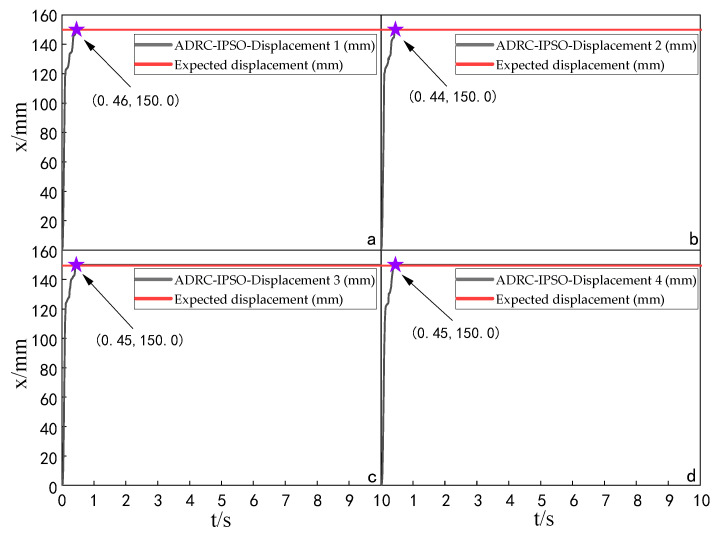
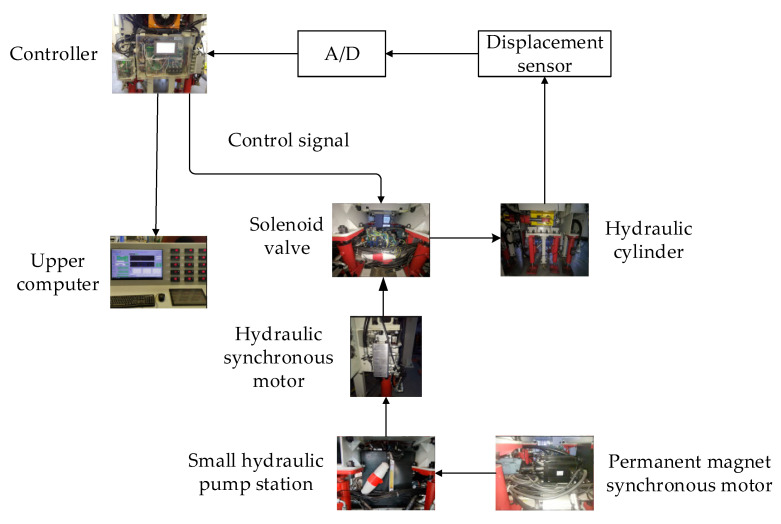
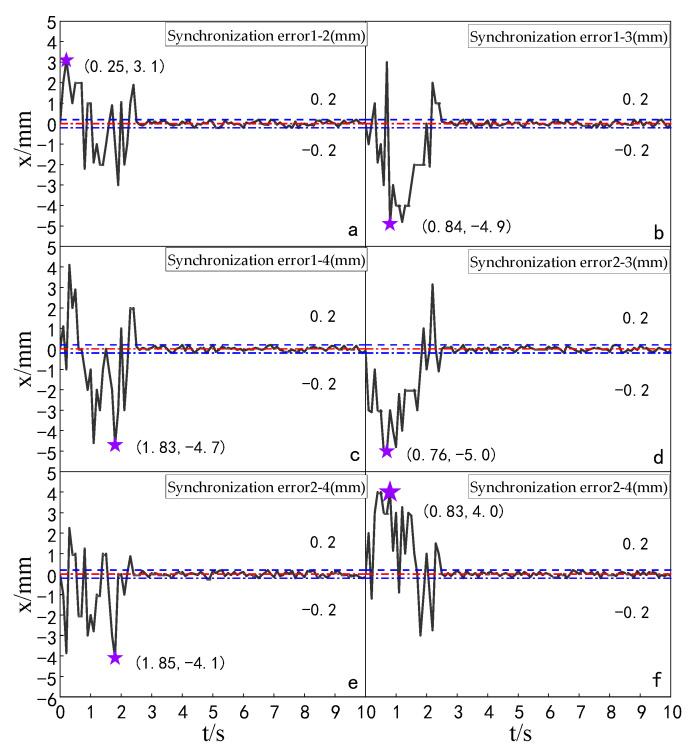
In order to solve the problems of nonlinearity, uncertainty and coupling of multi-hydraulic cylinder group platform of a digging-anchor-support robot, as well as the lack of synchronization control accuracy of hydraulic synchronous motors, an improved Automatic Disturbance Rejection Controller-Improved Particle Swarm Optimization (ADRC-IPSO) position synchronization control method is proposed. The mathematical model of a multi-hydraulic cylinder group platform of a digging-anchor-support robot is established, the compression factor is used to replace the inertia weight, and the traditional Particle Swarm Optimization (PSO) algorithm is improved by using the genetic algorithm theory to improve the optimization range and convergence rate of the algorithm, and the parameters of the Active Disturbance Rejection Controller (ADRC) were adjusted online. The simulation results verify the effectiveness of the improved ADRC-IPSO control method. The experimental results show that, compared with the traditional ADRC, ADRC-PSO and PID controller, the improved ADRC-IPSO has better position tracking performance and shorter adjusting time, and its step signal synchronization error is controlled within 5.0 mm, and the adjusting time is less than 2.55 s, indicating that the designed controller has better synchronization control effect.
Keywords: ADRC; PSO; digging-anchor-support robot; multiple hydraulic cylinders; position synchronization.
Conflict of interest statement
The authors declare no conflict of interest.
Figures


























Similar articles
-
Active Disturbance Rejection Control Design Using the Optimization Algorithm for a Hydraulic Quadruped Robot.Comput Intell Neurosci. 2021 Mar 15;2021:6683584. doi: 10.1155/2021/6683584. eCollection 2021. Comput Intell Neurosci. 2021. PMID: 33815496 Free PMC article.
-
A double closed loop digital hydraulic cylinder position system based on switching active disturbance rejection control.Sci Rep. 2025 Jan 10;15(1):1556. doi: 10.1038/s41598-025-85640-9. Sci Rep. 2025. PMID: 39789075 Free PMC article.
-
PD-Based Optimal ADRC with Improved Linear Extended State Observer.Entropy (Basel). 2021 Jul 13;23(7):888. doi: 10.3390/e23070888. Entropy (Basel). 2021. PMID: 34356430 Free PMC article.
-
Research on Trajectory Tracking Control Method for Crawler Robot Based on Improved PSO Sliding Mode Disturbance Rejection Control.Sensors (Basel). 2025 Mar 27;25(7):2113. doi: 10.3390/s25072113. Sensors (Basel). 2025. PMID: 40218626 Free PMC article.
-
The Improved Particle Swarm Optimization Method: An Efficient Parameter Tuning Method with the Tuning Parameters of a Dual-Motor Active Disturbance Rejection Controller.Sensors (Basel). 2023 Oct 20;23(20):8605. doi: 10.3390/s23208605. Sensors (Basel). 2023. PMID: 37896698 Free PMC article.
Cited by
-
An improve nonlinear robust control approach for robotic manipulators with PSO-based global optimization strategy.Sci Rep. 2024 Sep 13;14(1):21447. doi: 10.1038/s41598-024-72156-x. Sci Rep. 2024. PMID: 39271908 Free PMC article.
-
Enhanced path tracking control of hydraulic support pushing mechanism via adaptive sliding mode technique in coal mine backfill operations.Heliyon. 2024 Sep 26;10(19):e38437. doi: 10.1016/j.heliyon.2024.e38437. eCollection 2024 Oct 15. Heliyon. 2024. PMID: 39687440 Free PMC article.
-
Prediction of Input-Output Characteristic Curves of Hydraulic Cylinders Based on Three-Layer BP Neural Network.Sensors (Basel). 2025 Mar 20;25(6):1949. doi: 10.3390/s25061949. Sensors (Basel). 2025. PMID: 40293110 Free PMC article.
-
Observer-Based Adaptive Sliding Mode Compensation Position-Tracking Control for Drilling Tool Attitude Adjustment.Sensors (Basel). 2024 Apr 9;24(8):2404. doi: 10.3390/s24082404. Sensors (Basel). 2024. PMID: 38676021 Free PMC article.
References
-
- Li H., Chen L., Tian F., Zhao L., Tian S. Comprehensive Evaluation Model of Coal Mine Safety under the Combination of Game Theory and TOPSIS. Math. Probl. Eng. 2022;2022:114516. doi: 10.1155/2022/5623282. - DOI
-
- Sun J., Qian X. Analysis of Coal mine Accidents in China from 2004 to 2015. Ind. Mine Autom. 2016;42:1–5.
-
- Sinha S., Yoginder P.C. An evaluation of roof support plans at two coal mines in Illinois using numerical models. Int. J. Rock Mech. Min. Sci. 2016;82:1–9. doi: 10.1016/j.ijrmms.2015.11.009. - DOI
Grants and funding
- 202104a07020005/the Anhui Provincial Key Research and Development Plan
- KJ2020A0281/the University Natural Science Research Program of Anhui Province
- 2008085ME178/the Anhui Provincial Natural Science Foundation
- SKLMRDPC20ZZ01/the Supported by the Independent Project of State Key Laboratory
- GXXT-2022-019/the University Synergy Innovation Prgram of Ahui Province
LinkOut - more resources
Full Text Sources
