

Mice identify subgoal locations through an action-driven mapping process
- PMID: 37119818
- PMCID: PMC10636595
- DOI: 10.1016/j.neuron.2023.03.034
Mice identify subgoal locations through an action-driven mapping process
Abstract
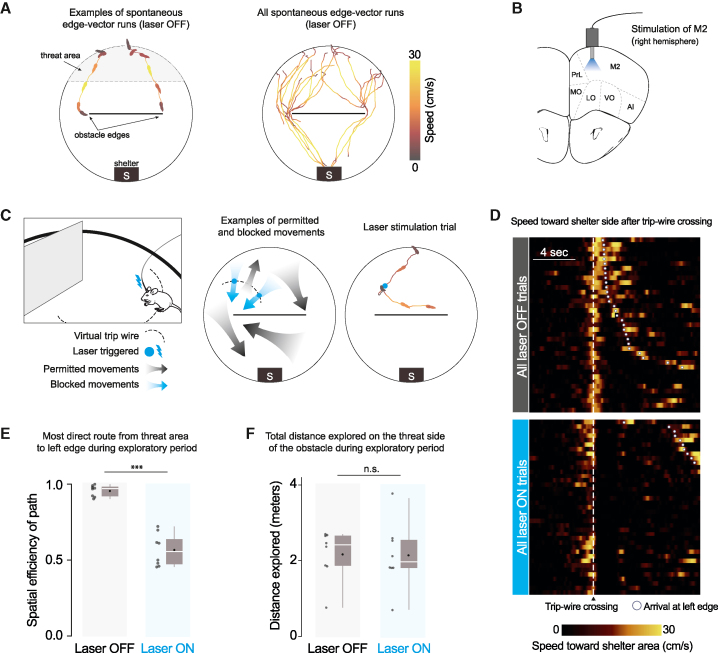
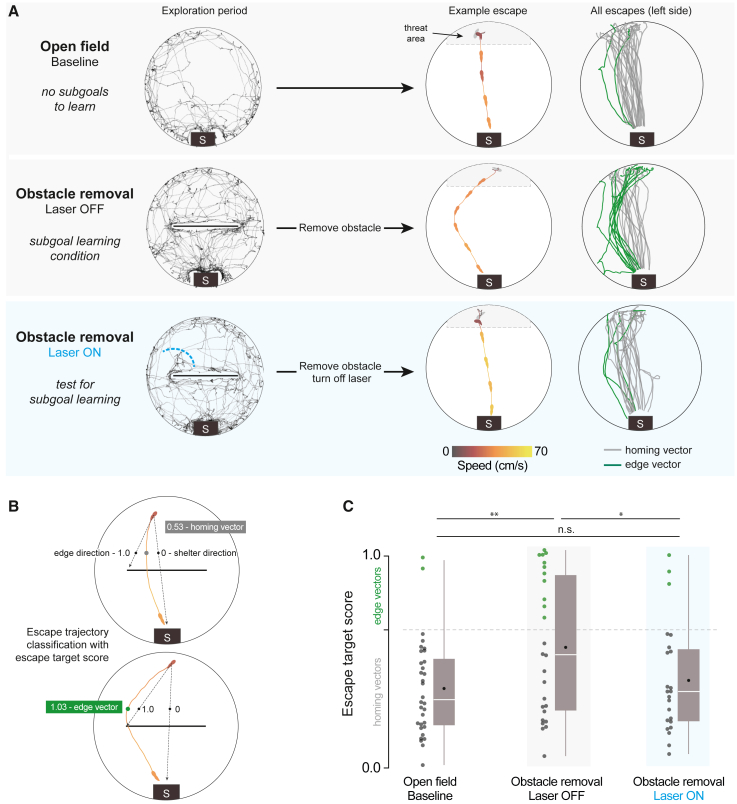
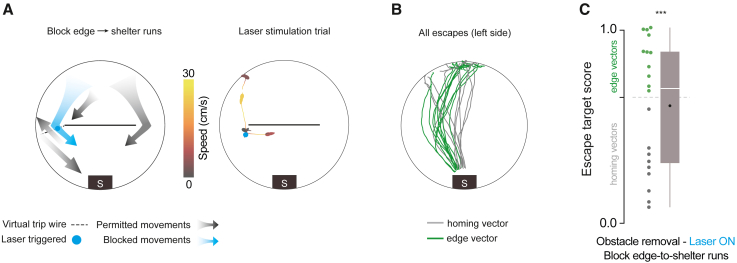
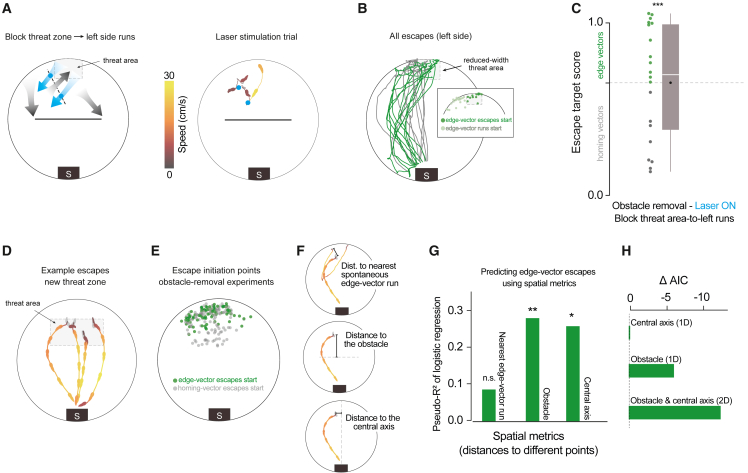
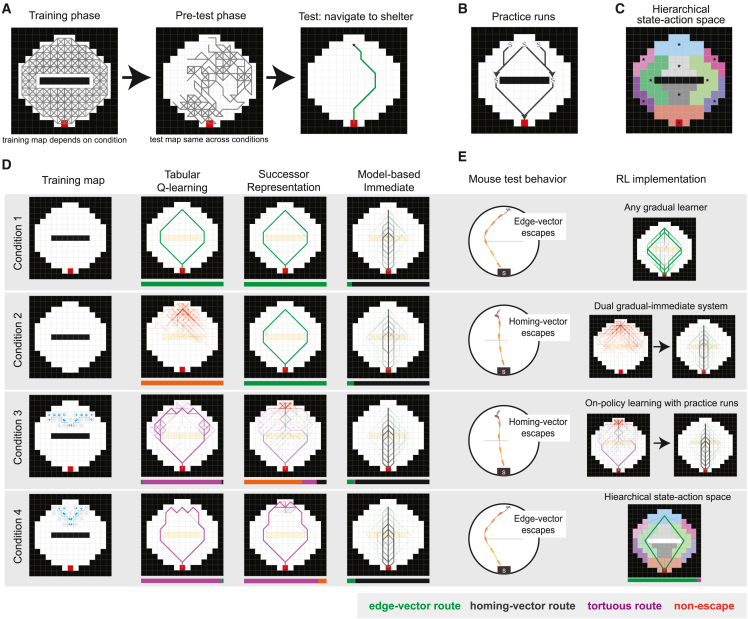
Mammals form mental maps of the environments by exploring their surroundings. Here, we investigate which elements of exploration are important for this process. We studied mouse escape behavior, in which mice are known to memorize subgoal locations-obstacle edges-to execute efficient escape routes to shelter. To test the role of exploratory actions, we developed closed-loop neural-stimulation protocols for interrupting various actions while mice explored. We found that blocking running movements directed at obstacle edges prevented subgoal learning; however, blocking several control movements had no effect. Reinforcement learning simulations and analysis of spatial data show that artificial agents can match these results if they have a region-level spatial representation and explore with object-directed movements. We conclude that mice employ an action-driven process for integrating subgoals into a hierarchical cognitive map. These findings broaden our understanding of the cognitive toolkit that mammals use to acquire spatial knowledge.
Keywords: cognitive map; escape; obstacles; spatial learning; subgoals; threat.
Copyright © 2023 The Author(s). Published by Elsevier Inc. All rights reserved.
Conflict of interest statement
Declaration of interests The authors declare no competing interests.
Figures
References
-
- Hull C.L. The concept of the Habit-Family hierarchy, and maze learning. Part I. Psychol. Rev. 1934;41:33–54.
-
- Restle F. Discrimination of cues in mazes: A resolution of the place-vs.-response question. Psychol. Rev. 1957;64:217–228. - PubMed
-
- Tolman E.C. Cognitive maps in rats and men. Psychol. Rev. 1948;55:189–208. - PubMed
-
- O’Keefe J., Nadel L. Clarendon Press; 1978. The Hippocampus as a Cognitive Map.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
