

Boost event-driven tactile learning with location spiking neurons
- PMID: 37152590
- PMCID: PMC10160479
- DOI: 10.3389/fnins.2023.1127537
Boost event-driven tactile learning with location spiking neurons
Abstract
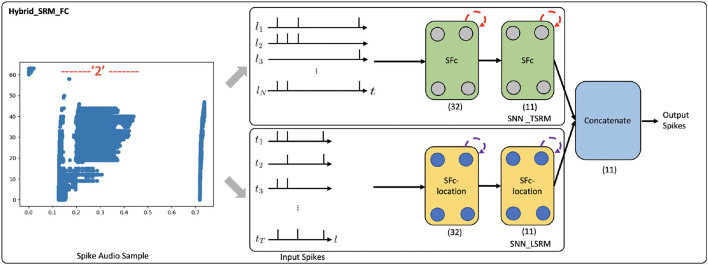
Tactile sensing is essential for a variety of daily tasks. Inspired by the event-driven nature and sparse spiking communication of the biological systems, recent advances in event-driven tactile sensors and Spiking Neural Networks (SNNs) spur the research in related fields. However, SNN-enabled event-driven tactile learning is still in its infancy due to the limited representation abilities of existing spiking neurons and high spatio-temporal complexity in the event-driven tactile data. In this paper, to improve the representation capability of existing spiking neurons, we propose a novel neuron model called "location spiking neuron," which enables us to extract features of event-based data in a novel way. Specifically, based on the classical Time Spike Response Model (TSRM), we develop the Location Spike Response Model (LSRM). In addition, based on the most commonly-used Time Leaky Integrate-and-Fire (TLIF) model, we develop the Location Leaky Integrate-and-Fire (LLIF) model. Moreover, to demonstrate the representation effectiveness of our proposed neurons and capture the complex spatio-temporal dependencies in the event-driven tactile data, we exploit the location spiking neurons to propose two hybrid models for event-driven tactile learning. Specifically, the first hybrid model combines a fully-connected SNN with TSRM neurons and a fully-connected SNN with LSRM neurons. And the second hybrid model fuses the spatial spiking graph neural network with TLIF neurons and the temporal spiking graph neural network with LLIF neurons. Extensive experiments demonstrate the significant improvements of our models over the state-of-the-art methods on event-driven tactile learning, including event-driven tactile object recognition and event-driven slip detection. Moreover, compared to the counterpart artificial neural networks (ANNs), our SNN models are 10× to 100× energy-efficient, which shows the superior energy efficiency of our models and may bring new opportunities to the spike-based learning community and neuromorphic engineering. Finally, we thoroughly examine the advantages and limitations of various spiking neurons and discuss the broad applicability and potential impact of this work on other spike-based learning applications.
Keywords: Spiking Neural Networks; event-driven tactile learning; event-driven tactile object recognition; event-driven tactile slip detection; location spiking neurons; robotic manipulation; spiking neuron models.
Copyright © 2023 Kang, Banerjee, Chopp, Katsaggelos and Cossairt.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures







References
-
- Baishya S. S., Bäuml B. (2016). “Robust material classification with a tactile skin using deep learning,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Daejeon: IEEE, 8–15.
-
- Calandra R., Owens A., Jayaraman D., Lin J., Yuan W., Malik J., et al. . (2018). More than a feeling: Learning to grasp and regrasp using vision and touch. IEEE Robot. Automat. Lett. 3, 3300–3307. 10.48550/arXiv.1805.11085 - DOI
LinkOut - more resources
Full Text Sources