

Active fixation as an efficient coding strategy for neuromorphic vision
- PMID: 37156822
- PMCID: PMC10167324
- DOI: 10.1038/s41598-023-34508-x
Active fixation as an efficient coding strategy for neuromorphic vision
Abstract
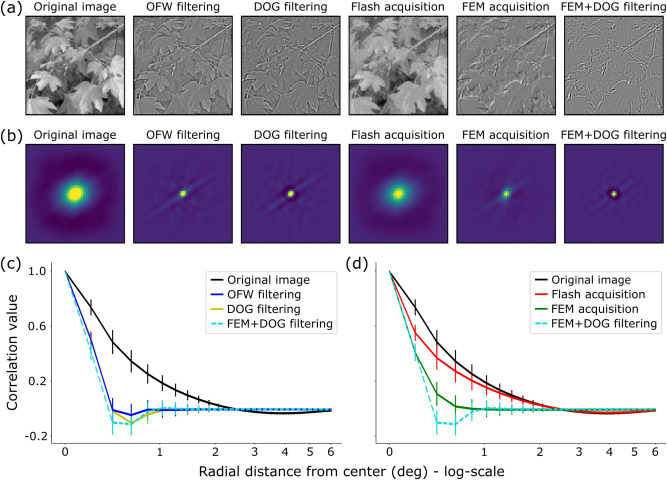
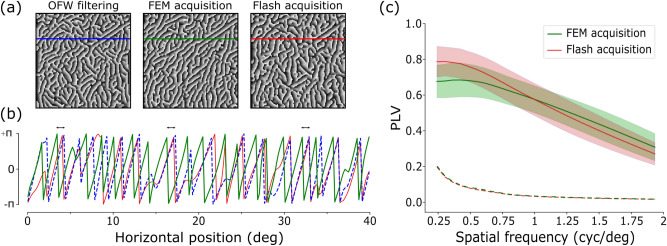
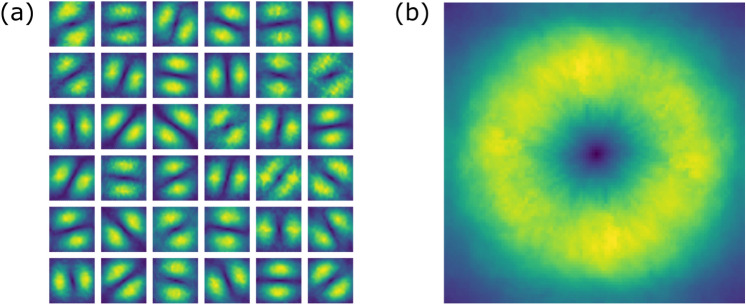
Contrary to a photographer, who puts a great effort in keeping the lens still, eyes insistently move even during fixation. This benefits signal decorrelation, which underlies an efficient encoding of visual information. Yet, camera motion is not sufficient alone; it must be coupled with a sensor specifically selective to temporal changes. Indeed, motion induced on standard imagers only results in burring effects. Neuromorphic sensors represent a valuable solution. Here we characterize the response of an event-based camera equipped with fixational eye movements (FEMs) on both synthetic and natural images. Our analyses prove that the system starts an early stage of redundancy suppression, as a precursor of subsequent whitening processes on the amplitude spectrum. This does not come at the price of corrupting structural information contained in local spatial phase across oriented axes. Isotropy of FEMs ensures proper representations of image features without introducing biases towards specific contrast orientations.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures




References
-
- Mead C. Neuromorphic electronic systems. Proc. IEEE. 1990;78:1629–1636. doi: 10.1109/5.58356. - DOI
-
- Lichtsteiner P, Posch C, Delbruck T. A 128 128 120 db 15 s latency asynchronous temporal contrast vision sensor. IEEE J. Solid-State Circuits. 2008;43:566–576. doi: 10.1109/JSSC.2007.914337. - DOI
-
- Mead CA, Mahowald MA. A silicon model of early visual processing. Neural Netw. 1988;1:91–97. doi: 10.1016/0893-6080(88)90024-X. - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
