

The potential underlying mechanisms during learning flights
- PMID: 37204434
- PMCID: PMC10354122
- DOI: 10.1007/s00359-023-01637-7
The potential underlying mechanisms during learning flights
Abstract
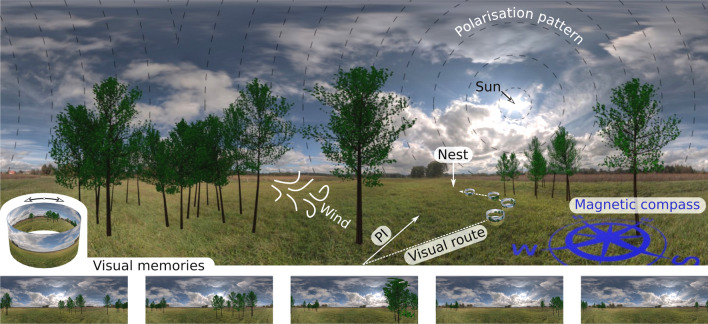
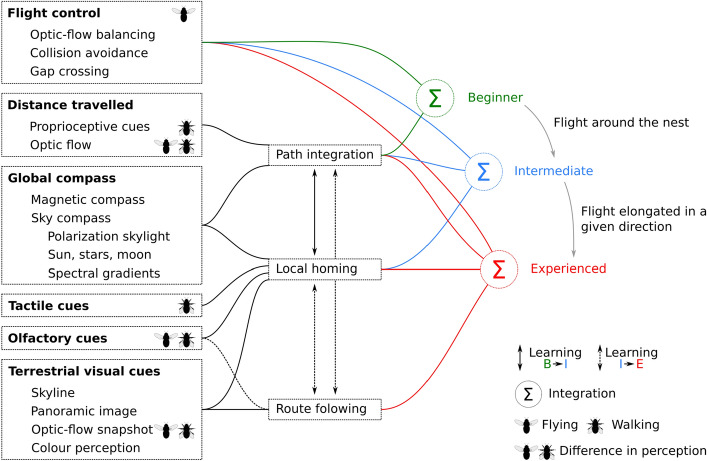
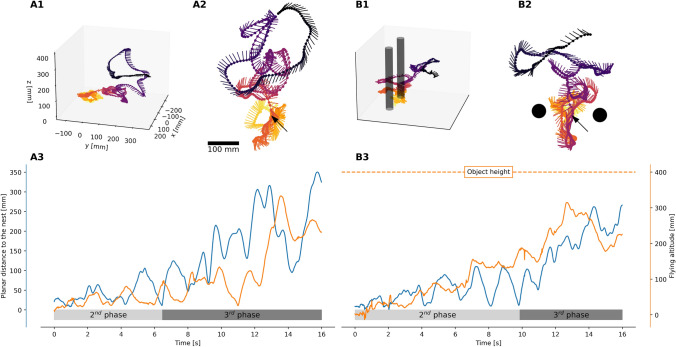
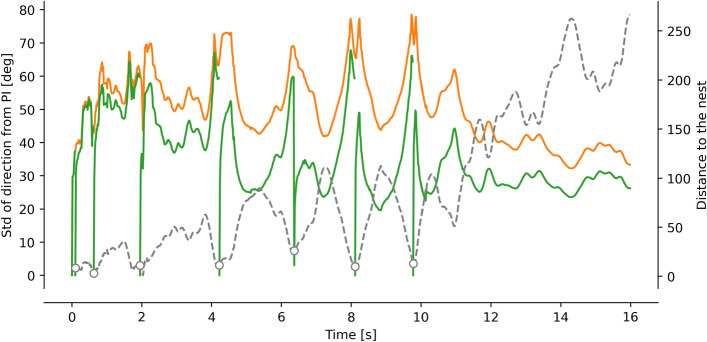
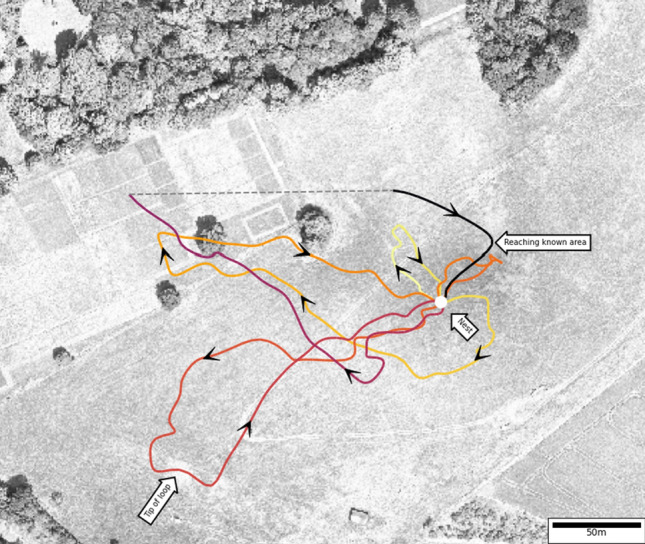
Hymenopterans, such as bees and wasps, have long fascinated researchers with their sinuous movements at novel locations. These movements, such as loops, arcs, or zigzags, serve to help insects learn their surroundings at important locations. They also allow the insects to explore and orient themselves in their environment. After they gained experience with their environment, the insects fly along optimized paths guided by several guidance strategies, such as path integration, local homing, and route-following, forming a navigational toolkit. Whereas the experienced insects combine these strategies efficiently, the naive insects need to learn about their surroundings and tune the navigational toolkit. We will see that the structure of the movements performed during the learning flights leverages the robustness of certain strategies within a given scale to tune other strategies which are more efficient at a larger scale. Thus, an insect can explore its environment incrementally without risking not finding back essential locations.
Keywords: Homing; Hymenopteran; Learning; Navigation.
© 2023. The Author(s).
Figures


References
-
- Bertrand O, Lobecke A, Egelhaaf M. Learning and returning flights of bumblebees Bombus terrestris in an octogonal arena. Bielef Univ. 2020 doi: 10.4119/unibi/2943403. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
